OJ Electronics OJ-Air2-RHX2M Mode d'emploi
- Taper
- Mode d'emploi
La page est en cours de chargement...

2
© 2016 OJ Electronics A/S
INSTRUCTIONS
Svenska ........................................................................................................ 3 - 8
Norsk ............................................................................................................ 9 - 14
Dansk ........................................................................................................... 15 - 20
English .......................................................................................................... 21 - 26
Deutsch ........................................................................................................ 27 - 32
Français ....................................................................................................... 33 - 38
Русский ........................................................................................................ 39 - 45
ILLUSTRATIONS
Illustrations ................................................................................................... 46 - 50
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

33
© 2016 OJ Electronics A/S
Français
LISTE DES FIGURES
Les figures suivantes se situent au verso des instructions :
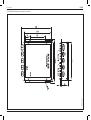
Fig. 1: Dimensions mécaniques du contrôleur du moteur pas-à-pas
Fig. 2: Raccordements électriques
Fig. 3: Installation du contrôleur de rotation
Fig. 4: Dimensions mécaniques du moteur pas-à-pas
Fig. 5: Exemple de plaque de montage
Fig. 6: Poulies du moteur pour couple max.
Fig. 7: Poulies du moteur pour moindres variations
Fig. 8: Contrôle 0-10 V
Fig. 9: Compensation pour transfert non linéaire de chaleur
Fig. 10: Modbus raccordements
Fig. 11: Raccordements électriques du contrôleur de rotation
INTRODUCTION
Le RHX2M est un système de contrôle de moteur pas-à-pas qui assure un contrôle
précis et silencieux des échangeurs de chaleur rotatifs dans des systèmes de ventilation.
Le système comprend un contrôleur du moteur pas-à-pas, un moteur pas-à-pas et un
contrôleur de rotation. Le contrôleur de rotation s’assure que le moteur tourne comme
requis.
Le RHX2M est conçu pour assurer un contrôle précis de la vitesse du rotor ce qui per-
met une récupération de chaleur avec ecacité d’énergie.
Gamme de produits
Type Produit
RHX2M-1212
VVX, contrôleur et moteur 2 Nm
Modbus 0-10 V CC IP54
RHX2M-1412
VVX, contrôleur et moteur 4 Nm
Modbus 0-10 V CC IP54
RHX2M-1612
VVX, contrôleur et moteur 6 Nm
Modbus 0-10 V CC IP54
FONCTION
Le RHX2M-1x12 est un remplacement avantageux des solutions à moteur avec engre-
nage traditionnel. Le moteur pas-à-pas fournit un couple constant pour toute la gamme
de vitesse contrairement aux moteurs avec engrenages qui perdent du couple aux
basses et hautes vitesses. Grâce à la linéarité de la courbe de couple du moteur pas-à-
pas, il est possible de contrôler précisément la vitesse du rotor sur une plage bien plus
grande. Ceci permet d’obtenir une récupération de chaleur avec un contrôle ecace
d’énergie et assure un contrôle plus précis de la température.
Le RHX2M peut être contrôlé par un signal 0-10 V ou un Modbus. Il peut donc être rac-
cordé adéquatement à des contrôles de systèmes de ventilation traditionnels ou à des
systèmes plus avancés comme le OJ-Air2 de OJ-Electronics.
Le moteur pas-à-pas est contrôlé par micro pas via un courant sinusoïdal constant pour
assurer une rotation de l’arbre avec un couple constant. Les battements de couple sont
donc évités ce qui assure un fonctionnement silencieux.
INTERDICTION D’USAGE
Nous déclarons par la présente, conformément à l’ordonnance 561/94 émise par l’Autori-
té danoise sur l’environnement du travail, que ce produit ne doit pas être mis en fonction
avant que la machine / le système dans lequel il doit être incorporé ait été entièrement
déclaré conforme à toutes les exigences pertinentes de la directive machines 98/37/CEE
et tous règlements nationaux applicables.
Le produit ne doit pas être mis sous tension avant que toute l’installation soit conforme à
TOUTES les directives UE applicables.
Le produit bénéficie d’une garantie du constructeur du fabricant s’il est installé confor-
mément aux présentes instructions et à la législation en vigueur.
Si le produit a été endommagé de quelque manière que ce soit, par exemple lors du
transport, il doit être contrôlé et vérifié par un personnel autorisé avant tout raccordement
à l’alimentation électrique.
INSTALLATION
Le RHX2M est conçu pour être installé à l’intérieur du bâti de l’échangeur de chaleur.

34
© 2016 OJ Electronics A/S
Contrôleur du moteur pas-à-pas
Le contrôleur du moteur pas-à-pas doit être installé de façon à permettre une libre circula-
tion d’air autour des ailettes de refroidissement et de préférence avec les entrées de câbles
faisant face vers le bas. Le contrôleur doit être fixé en place en utilisant les quatre trous pour
vis sur les côtés de l’appareil, voir fig. 1.
Raccordements électriques
Les câbles principaux à 230 V doivent être protégés par un fusible séparé de type G. Les
raccordements sont montrés à la fig. 2.
Pour faciliter le raccordement, le contrôleur et le moteur pas-à-pas sont munis de câbles
moteurs et de connecteurs mâles et femelles respectivement. Les connecteurs doivent être
fermement pressés l’un contre l’autre jusqu’à ce que le verrouillage s’engage. Raccordez le
Modbus aux bornes à vis identifiées par GND, A & B ou par une prise RJ12/6P6C. Montez
la prise RJ12/6 après que le câble soit passé par le raccord vissé.
Contrôleur de rotation
Le garde OJ Rotation est une sonde inductive. Une cible pour sonde doit être fixée sur
l’échangeur de chaleur rotatif. La cible pour la sonde doit être un matériau métallique, par
ex. la tête d’un boulon, d’une vis ou similaire.
Le garde OJ Rotation doit être fixé comme montré à la fig. 3 et raccordé aux bornes 9, 10 et
11 du contrôleur RHX2M (voir fig. 2 + 11).
Quand le garde OJ Rotation a été correctement fixé, la DEL verte du contrôleur clignotera
chaque fois que la cible passe devant le garde OJ Rotation.
Moteur pas-à-pas
Le moteur pas-à-pas est muni de quatre trous (voir fig. 4) pour faciliter sa fixation à une
plaque de montage. Voir un exemple à la fig. 5. La plaque de montage doit être courte,
rigide et munie d’amortisseurs de vibrations afin d’éviter un transfert de résonances vers le
bâti du rotor. Pour éviter que le moteur pas-à-pas ne subisse des dommages par électricité
statique, il faut établir une liaison équipotentielle par un câble reliant les châssis du moteur
pas-à-pas et de l’unité de ventilation (fig. 5).
Poulie du moteur
La poulie doit être fixée à l’aide d’une vis de montage qui doit s’appuyer sur le plat de
l’arbre du moteur. Voir fig. 4.
Le plus fort couple rotor peut être obtenu en utilisant une petite poulie puisque le couple du
moteur est transféré entre le rotor et la poulie par le rapport de transmission (N) (voir fig. 6
et 7). La poulie doit cependant être susamment grande pour obtenir la vitesse de rotor re-
quise et doit être capable de transférer la puissance à une courroie tendue conformément à
la charge radiale max. du moteur. Voir la section à propos des caractéristiques techniques.
Mesures de sécurité
Tous les signaux de contrôle sont isolés galvaniquement de la tension principale de 230
V. La tension de sortie pour le moteur pas-à-pas est isolée galvaniquement et limitée à
48 V max.
Protection contre les courts-circuits
Toutes les entrées et sorties sont protégées contre les courts-circuits afin de prévenir
un dommage au contrôleur en cas de mauvais raccordement ou d’un défaut du moteur
pas-à-pas.
Protection thermique
Le RHX2M possède une protection thermique intégrée qui prévient la surcharge des
composants électroniques.
CARACTÉRISTIQUES TECHNIQUES
Signaux d’entrée
Tension d’alimentation ...............................50-60 Hz, 230 V CA ±15 %
Préfusible max. ......................................................... 16 A
Tension de contrôle ................................................0-10 V CC
Impédance (tension de contrôle) ..........................................10 kΩ
Modbus communication série ...........................................RS485
Raccords Modbus ............ 1 x borne à vis, max. 1,5 mm2 + 2 x prises RJ12/6P6C
Contrôleur de rotation ...........(intégré 1,1 kΩ de rappel vers le niveau haut à +10 V)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .sonde inductive
Renversement ..................(intégré 10 kΩ de rappel vers le niveau haut à +10 V)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Entrée numérique
Signaux de sortie
Sortie de relai pour alarme .....................Relai de commutation NO 5 A, 250 V
Indicateur DEL .....................................3-couleurs (vert/jaune/rouge)
Couple ..................................................2 Nm, 4 Nm et 6 Nm
Rapport de transmission moteur/rotor ..................................1:50 max.
Tension d’alimentation our tous les éléments .............. +10 V DCC, max. 100 mA
Données sur l’environnement
Consommation d’énergie (en attente/couple statique) ..........................3 W
Température ambiante de fonctionnement ..............................-20/+40 °C
Température ambiante de remisage ...................................-20/+60 °C
Bâti ..................................................................IP54
Poids ................................................................1,6 kg
Français / Instruction RHX2M

35
© 2016 OJ Electronics A/S
Moteur
Longueur de câble (excluant connecteur) ....................................0,3m
Vitesse min. .........................................................1 t.p.m.
Vitesse max. ...................................................... 200 t.p.m.
Température du moteur pendant son fonctionnement ....................80°C max.
Bâti ..................................................................IP54
RHX2M-1212: 2 Nm
Consommation d’énergie (charge max./150 t.p.m.) ...........................45 W
Diamètre rotor [mm] ............................................ 1800 mm max.
Longueur de câble (excluant connecteur) ...................................1,7 m
Couple statique ......................................................0,2 Nm
Charge max. combinée sur l’arbre .................................Radiale 275 N
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Axiale 50 N
Poids du moteur ...................................................... 2,4 kg
RHX2M-1412 : 4 Nm
Consommation d’énergie (charge max./150 t.p.m.) ...........................90 W
Diamètre rotor [mm] ............................................ 2500 mm max.
Longueur de câble (excluant connecteur) ...................................2,2 m
Couple statique ......................................................0,4 Nm
Charge max. combinée sur l’arbre .................................Radiale 307 N
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Axiale 50 N
Poids du moteur ...................................................... 3,6 kg
RHX2M-1612 : 6 Nm
Consommation d’énergie (charge max./150 t.p.m.) ..........................150 W
Diamètre rotor [mm] ............................................ 3500 mm max.
Longueur de câble (excluant connecteur) ...................................2,7 m
ouple statique ........................................................0,6 Nm
Charge max. combinée sur l’arbre .................................Radiale 678 N
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Axiale 260 N
Poids du moteur ...................................................... 5,5 kg
FONCTIONNEMENT
Indication d’état pendant le fonctionnement normal :
La DEL indicatrice d’état sur le devant du RHX2M est de trois couleurs et peut s’allumer
ou clignoter.
• Lumière jaune : Le RHX2M est OK, moteur à l’arrêt.
• Jaune clignotant: Moteur en marche en mode purge.
• Lumière verte : Le moteur fonctionne normalement et tourne.
• Vert clignotant: Impulsion du contrôleur de rotation détectée.
• Lumière rouge : Voir DIAGNOSTIC DE PANNES.
Le RHX2M peut être contrôlé par un signal 0-10 V ou un Modbus, voir les sections
suivantes. Les commandes sont réglées par des commutateurs DIP. Les réglages ne
deviennent actifs qu’après l’arrêt du moteur.
SIGNAL 0-10 V
Les fonctions suivantes sont actives quand le RHX2M est contrôlé par un signal 0-10 V
et qu’il n’y a pas de Modbus avec communication active de raccordé.
Arrêt du moteur
Un signal 0-10 V inférieur à 0,6 V arrête le moteur (voir fig. 8).
Démarrage du moteur
Un signal 0-10 V supérieur à 1,1 V démarre le moteur (voir fig. 8).
Vitesse maximum du moteur.
Un signal 0-10 V supérieur à 9.5 V limite le moteur au réglage de vitesse max. (voir fig.
8). La vitesse max. du moteur peut être limitée à 150 ou 200 t.p.m. par un commutateur
DIP (voir fig. 2).
Compensation pour transfert non linéaire de chaleur
Le signal 0-10 V est automatiquement compensé par le RHX2M qui utilise une courbe
de performance inverse ce qui assure un transfert de chaleur bien plus linéaire et un
contrôle plus précis (voir fig. 9).
Purge
Quand le RHX2M s’arrête à cause d’un faible signal 0-10 V, il démarrera automatique-
ment toutes les 10 minutes et fonctionnera pendant 10 secondes à 10 % du réglage
pour vitesse max.
Ceci assure que le rotor passe continuellement sa section de purge. Avec un rapport de
transmission de 1:40 et une vitesse max. de 150 t.p.m. le rotor tourne de 22,5 degrés.
Contrôle de rotation
Le contrôleur de rotation peut être activé ou désactivé par un commutateur DIP (voir fig.
2).
Si la fonction est activée, un contrôleur de rotation doit être correctement installé et four-
nir une impulsion pour chaque tour du rotor. Le contrôleur de rotation active une alarme
si le rotor ne tourne pas à cause d’un défaut.
RHX2M Français / Instruction

36
© 2016 OJ Electronics A/S
Changement de sens de rotation
Le sens de rotation du moteur peut être changé pour assurer que le rotor tourne toujours
dans le bon sens par rapport à la section de purge.
Le sens de rotation du moteur est changé en activant les bornes 12 et 13 (voir fig. 2).
La rotation dans le sens des aiguilles d’une horloge (CW) ou dans le sens inverse (CCW)
est réglée par un commutateur DIP (voir fig. 2)
Type de moteur
Le contrôleur est réglé en usine pour le bon type de moteur par un commutateur DIP
(voir fig. 2). Notez que seulement un des commutateurs DIP 4, 5 et 6 doit être à ON.
Si le contrôleur est réglé pour le mauvais type de moteur, un mauvais fonctionnement
peut se produire à cause d’un couple insusant. Il peut aussi y avoir plus d’émission de
bruit et le moteur peut surchauer.
Bouton d’essai
Si vous appuyez sur le bouton de test pour vitesse max. (« max. speed ») (voir fig. 2),
l’entrée 0-10 V est automatiquement augmentée à 10 V ce qui accroît la vitesse du
moteur jusqu’à la vitesse max. préréglée. Il n’est pas nécessaire de désactiver le signal
0-10 V auparavant. Toutes les alarmes devraient cependant être désactivées auparavant.
Modbus
Si le RHX2M est raccordé à un réseau Modbus avec communication valide, le signal
0-10 V, les entrées numériques et les réglages des commutateurs DIP sont générale-
ment ignorés. Les commutateurs DIP pour le type de moteur doivent cependant être
correctement réglés pour le type de moteur eectivement utilisé.
La fonction de purge, la compensation pour un transfert de chaleur non linéaire et le
commutateur de test sont tous désactivés. Les changements de vitesse maximum faits
par le Modbus ne prennent eet que lorsque le moteur est arrêté. Les changements faits
à tout autre réglage sont appliqués nonobstant que le moteur fonctionne ou qu’il soit
arrêté.
Protocole Modbus
Le RHX2M possède l’adresse 0x4F (79) et le protocole de communication suivant : 38,4
KB, 1 démarrage, 8 données, 1 bit d’arrêt et pas de parité.
Les ports A et B du Modbus sont raccordés en parallèle dans l’unité RHX2M et peuvent
être utilisés pour des boucles continues.
Holding Registers (03)
Adr. Descr. Min. Max. Commentaires
0 PrcSet 0=0 %
10000=100.00
%
Réglage de vitesse en % d’intervalle
(MaxSpeed - MinSpeed).
1 MinSpeed 0=0 t.p.m. MaxSpeed
Vitesse minimum à 0 % du point de
consigne. 100=1 t.p.m.
2 MaxSpeed MinSpeed
20000=200.00
t.p.m.
Vitesse maximum à 100 % du point de
consigne. 100=1 t.p.m. Les changements
ne sont appliqués que lorsque le moteur
est arrêté.
3 StartIout 0 5500=5.500A
Courant de démarrage pour accrois-
sement de couple pendant le temps
de démarrage depuis le démarrage du
moteur.
RHX2-12M : Typiquement 3200=3,2 A
RHX2-14M : Typiquement 4100=4,1 A
RHX2-16M : Typiquement 5500=5,5 A
4 StartTime 0=0 sec. 300=300 sec.
Période à partir du démarrage du moteur
avec augmentation de StartIout. 20
secondes par défaut.
5 Non utilisé
6 MaxIout 0 5500=5.500 A
Courant du moteur pendant opération
normale, réglage par défaut est la valeur
maximum.
RHX2-12M : Typiquement 2500=2,5 A
RHX2-14M : Typiquement 3500=3,5 A
RHX2-16M : Typiquement 4500=4,5
A Augmenter le courant au-delà des
valeurs typiques augmente également le
couple, le bruit acoustique, la consom-
mation de puissance et la température du
moteur. Réduire le courant entraine l’eet
contraire.
7 Non utilisé
8 PrcHold Trq 0=0 % 1000=100.0 %
Couple statique OFF. Réglage couple
en % de courant max. Défaut 10 %
Input Registers (04)
Adr. Descr. Min. Max. Commentaires
Français / Instruction RHX2M

37
© 2016 OJ Electronics A/S
0 VVX_Type 1 3
Type de moteur sélectionné
via commutateur DIP.
1=RHX2-12M (2 Nm)
2=RHX2-14M (4 Nm)
3=RHX2-16M (6 Nm)
1 SoftwareVer 0 9999
Version de logiciel. 100=Version 1.00.
La version est changée à chaque mise à
jour du logiciel.
2 PrcOut 0=0 %
10000=100.00
%
Pour cent de sortie actuelle. Diérent
de PrcSet quand le moteur est accéléré/
ralenti au point de réglage.
3 InternTemp 0=0°C
20000= 200.00
°C
Température à l’intérieur du contrôleur
RHX2.
4 RPMOut 0=0 rpm
20000=200.00
rpm
Vitesse actuelle du moteur.
5 Vout 0=0 V 50=50 V Tension de sortie actuelle au moteur.
6 Iout 0=0 A 60000=6.000 A Courant de sortie actuel au moteur.
7 Power 0=0 W 200=200 W Puisance de sortie actuelle au moteur.
8 ExternSet 0=0 %
10000=100.00
%
Réglage de vitesse pour entrée 0-10 V. 0
% sous 1,1 V, 100 % plus de 9,5 V.
9 OperatTime 0=0 jour
10000=1000
jours
Durée de fonctionnement avec moteur de
rotation exprimée en jours entiers.
Commandes Modbus acceptées
Code Description Format données fonction
01 Lecture Coil État valeur 1-bit
02 Input lesen Status 1-Bit-Wert
03 Lecture holding registers valeur entière 16-bit
04 Lecture input registers valeur entière 16-bit
Coil Status (01)
Adresse Description Commentaires
0 1=On, 0=O Démarrage et arrêt du moteur
1
1=Réarmement d’alarme,
0=normal
Réarmement des alarmes
quand changement de 0 à 1
1 est automatiquement ramené à 0 après 1,5 s
2 Non utilisé Le 0 par défaut ne doit pas être changé
Adresse Description Commentaires
3
0=Dans le sens des
aiguilles d’une horloge,
1=Contraire au sens des
aiguilles d’une horloge
Détermine le sens de rotation du moteur
Input Status (02)
Adresse Description Commentaires
0
1=Alarme rotation,
0=normal
Alarme causée par l’absence d’un signal du
contrôleur de rotation (le contrôleur de rotation
est toujours actif avec le contrôle Modbus)
1
1=Alarme basse tension,
0=normal
Alarme causée par faible tension
d’alimentation 230 V
2
1=Alarme haute tension,
0=normal
Alarme causée par haute tension
d’alimentation 230 V
3
1=Alarme fort courant,
0=normal
Alarme causée par ort courant dans le moteur
4
1=Alarme température,
0=normal
Alarme causée par haute température
dans le contrôleur RHX2M
5 Non utilisé
6 Non utilisé
7 Non utilisé
8 Alternance entre 0 et 1
Chaque impulsion du contrôleur
de rotation change de valeur
9 Non utilisé
SERVICE ET ENTRETIEN
Pas de piles, service ou entretien ne sont requis. Veuillez communiquer avec votre fournisseur
si un défaut apparait.
DIAGNOSTIC DE PANNES
Indication de faute par DEL
• Pas de lumière: Absence de la tension d’alimentation 230 V ou RHX2M défectueux.
• Lumière rouge : Alarme générale, le moteur s’arrête tant que la condition d’alarme ne soit
corrigée.
• Clignotement rouge : Alarme du contrôleur de rotation, pas d’impulsion détectée.
Alarmes
Les bornes 4 et 6 du relai d’alarme sont activées (fermeture du contact) en situation d’alarme
ou si la tension d’alimentation 230 V manque.
Alarme générale
Peut être activée par une haute/faible tension ou une haute température. Les alarmes géné
-
RHX2M Français / Instruction

38
© 2016 OJ Electronics A/S
rales sont automatiquement réarmées quand la condition d’alarme est éliminée. Les alarmes
générales déclenchées par un fort courant (moteur court-circuité) ne sont pas automatique
-
ment réarmées.
Les alarmes générales peuvent également être réarmées en court-circuitant les bornes (10-
11) du contrôleur de rotation pendant cinq secondes ou via le Modbus.
Alarme contrôleur de rotation
Le contrôleur de rotation est surveillé chaque fois que le contrôleur RHX2M démarre le
moteur. Si aucune impulsion n’est reçue avant que le moteur ait tourné 50 fois, la vitesse du
moteur est réduite à 0 t.p.m. La vitesse est alors graduellement augmentée jusqu’à ce que le
réglage de vitesse soit atteint. S’il n’y a toujours pas d’impulsion reçue, cette séquence est
répétée trois fois en tout avant que l’alarme du contrôleur de rotation soit activée.
Les alarmes du contrôleur de rotation peuvent être réarmées en court-circuitant les bornes
(10-11) du contrôleur de rotation pendant au moins 1 seconde ou par une commande du
Modbus. Les alarmes du contrôleur de rotation sont typiquement causées par un défaut
de la courroie d’entrainement ou du couple du moteur (voir « Le moteur est bruyant »). Ce
problème survient le plus souvent lors de débit max. d’air dans le rotor.
LE MOTEUR EST BRUYANT ET INSTABLE
Type de moteur
Il y a un mauvais réglage (voir fig. 2) des commutateurs DIP pour le choix du type de moteur
ou le mauvais moteur pas-à-pas est installé.
Réglage du rotor
Le rotor tourne lentement et le moteur pas-à-pas est surchargé.
Quand les échangeurs de chaleur/unités de ventilation sont correctement installés, le rotor
devrait tourner facilement en le poussant à la main. Avec une mauvaise installation, le couple
requis pour faire tourner le rotor peut augmenter dramatiquement à cause :
• L’unité de ventilation n’est pas au niveau
• Le réglage du rotor est manquant/incorrect
• Les bandes de scellement et brosses sont trop serrées
S’il y a surcharge du moteur pas-à-pas, il se désynchronise et produit un battement de
couple plus faible. Le résultat est un fonctionnement « saccadé », bruyant et une mauvaise
rotation. Ceci n’endommage cependant pas le moteur ni le contrôleur.
Quand le rotor a été ajusté correctement et qu’il peut être tourné au couple normal, le moteur
peut être redémarré et il tournera normalement.
MISE AU REBUT ET PROTECTION DE L’ENVIRONNEMENT
Aider à la protection de l’environnement en jetant l’emballage et les produits superflus de
façon responsable.
Français / Instruction RHX2M
Mise au rebut de produits
Les produits marqués de ce symbole ne doivent pas être rebutés avec les
déchets domestiques mais doivent être livrés à un centre de collecte de rebus en
conformité avec les règlements locaux en vigueur.
OJ ELECTRONICS A/S
Stenager 13B · DK-6400 Sønderborg
Tél. +45 73 12 13 14 · Fax +45 73 12 13 13
[email protected] · www.ojelectronics.com
OMOLOGATION CE
OJ Electronics A/S déclare par la présente sous son unique responsabilité que le produit
est conforme aux directives suivantes du Parlement européen :
2011/65/UE Directive RoHS
DIRECTIVE 2011/65/EU DU PARLEMENT EUROPÉEN ET DU CONSEIL
du 8 juin 2011 à propos de la limitation de l’utilisation de certaines substances dange
-
reuses dans les équipements électriques et électroniques
2014/30/EU Directive CEM
DIRECTIVE 2014/30/EU DU PARLEMENT EUROPÉEN ET DU CONSEIL
du 26 février 2014 à propos de l’harmonisation des lois des États membres concernant la
compatibilité électromagnétique
2014/35/EU Directive basse tension
DIRECTIVE 2014/35/EU DU PARLEMENT EUROPÉEN ET DU CONSEIL
du 26 février 2014 à propos de l’harmonisation des lois des États membres concernant la
mise à disposition pour les marchés d’équipements électriques conçus pour être utilisés
avec certaines limites de tension.
Normes appliquées
EN 60730-1 2011 Contrôles électriques automatiques pour domicile et usage
similaire - Partie 1 : Exigences générales
EN 61000-6-3 2007 Compatibilité électromagnétique (CEM) Partie 6-3 : Normes
génériques - Norme d’émission pour les environnements résiden
-
tiels et commerciaux, ainsi que l’industrie légère +A1 : 2011
EN 61000-6-2 2005 Compatibilité électromagnétique (CEM) Partie 6-2 : Normes
génériques - Immunité pour les environnements industriels .
Le produit est conçu pour être intégré dans une machinerie ou être joint à d’autres compo
-
sants de machine pour être intégré dans des machines assujetties à la Directive 98/37/CEE
du Parlement européen et du Conseil (et amendements subséquents). Le produit lui-même
n’est donc pas conforme aux exigences de cette directive sous tous rapports.
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52




















































OJ Electronics OJ-Air2-RHX2M Mode d'emploi
- Taper
- Mode d'emploi
dans d''autres langues
Documents connexes
-
OJ Electronics OJ-EC Mode d'emploi
-
-
-
-
-
-
-
-
-