
EXO
Manuel de l’utilisateur
PLATEFORME AVANCEE DE SURVEILLANCE DE LA QUALITE DES EAUX
Produit 603789REF
Révision B

Les informations contenues dans ce manuel sont sujettes à
modification sans préavis.
Tout a été mis en œuvre pour que les informations présentées dans
ce manuel soient complètes, précises et actualisées. Le fabricant ne
saurait être tenu pour responsable des erreurs ou omissions
contenues dans ce manuel. Consulter le site www.EXOwater.com
pour obtenir la version la plus récente de ce manuel.

Sommaire
1. Introduction
1.1 Vue d’ensemble de la sonde EXO1
1.2 Vue d’ensemble de la sonde EXO2
1.3 Vue d’ensemble du terminal portatif EXO
1.4 Vue d’ensemble et caractéristiques des capteurs EXO
1.5 Conductivité/température
1.6 Profondeur et niveau
1.7 Oxygène dissous
1.8 MODf
1.9 pH et redox
1.10 Algues totales (chlorophylle et cyanobactéries)
1.11 Turbidité
2. Fonctionnement
2.1 Installer les piles
2.2 Installer/démonter les capteurs
2.3 Installer/démonter la protection des capteurs ou la coupelle de calibration
2.4 Indications d’état des LED de la sonde
2.5 Activer la sonde, lancer le Bluetooth
Connecter la sonde au terminal portatif
2.6 Câble de terrain
2.7 Communication sans fil Bluetooth
2.8 Installer le logiciel KOR
Connecter la sonde
2.9 USB
2.10 Connexion Bluetooth et PC
2.11 Transmission des données (PCD)
2.12 Cellule de mesure
3. Terminal portatif
3.1 Installer les piles
3.2 Allumer/éteindre le terminal
Connecter le terminal portatif à la sonde
3.3 Câble de terrain
3.4 Communication sans fil Bluetooth
Echantillonnage ponctuel
3.5 Visualiser les données en direct
3.6 Enregistrer les données de l’échantillonnage ponctuel
3.7 Télécharger des données
3.8 GPS
4. Logiciel KOR
4.1 Introduction à la navigation
4.2 Menu Exécuter
4.3 Menu Calibrer
4.4 Menu Enregistrer
4.5 Menu Sites
4.6 Menu Données
4.7 Menu Options
4.8 Menu Connexions
4.9 Menu Aide
4.10 Fichiers de données & emplacements des fichiers
4.11 SDI-12 Page 3

5. Calibration
5.1 Introduction au principe de base
5.2 Calibration de la conductivité/température
5.3 Calibration de l’oxygène dissous
5.4 Calibration de la profondeur
5.5 Calibration du pH
5.6 Calibration du redox
5.7 Calibration de la turbidité
5.8 Calibration des algues totales (chlorophylle et cyanobactéries)
5.9 Calibration de la MOD par fluorescence
5.10 Etalons de calibration
5.11 Données d’étalonnage
6. Maintenance
6.1 Stockage de la sonde de courte ou longue durée
6.1 Maintenance de la sonde
6.2 Installer/remplacer les piles de la sonde
6.3 Remplacer les porte-sondes
6.4 Mettre à jour le firmware de la sonde
6.5 Maintenance et stockage du terminal portatif
6.6 Installer/remplacer les piles du terminal portatif
6.7 Mettre à jour le firmware du terminal portatif & le logiciel KOR sur le terminal
6.8 Stockage et maintenance du capteur de profondeur
6.9 Maintenance et stockage des capteurs optiques standard
6.10 Maintenance et stockage du capteur de conductivité/température
6.11 Réhydratation, maintenance et stockage du capteur d’oxygène dissous
6.12 Remplacement du capuchon du capteur
6.13 Réhydratation, maintenance et stockage du capteur pH et redox
6.14 Remplacement du module du capteur
6.15 Maintenance et stockage du racleur
6.16 Maintenance et stockage du câble de terrain
6.17 Maintenance des systèmes antifouling
Anode sacrificielle
6.18 Maintenance et stockage des connecteurs
6.19 Maintenance de la cellule de mesure
7. Santé & sécurité, garantie, dépannage
7.1 Produits chimiques
Solutions de conductivité
Solutions pH
Solution Zobell
Etalon de turbidité
Rayons ultraviolets (capteur de MOD par fluorescence)
7.2 Radiofréquence
7.3 Déclarations de conformité
7.4 Garantie de l’appareil
7.5 Instructions pour le nettoyage & l’emballage de l’appareil
7.6 Recyclage
Page 4

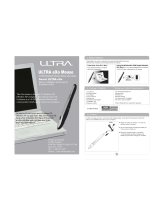
La sonde EXO1 est un appareil multi-paramètres qui collecte des données relatives à la qualité de l’eau. La
sonde collecte les données grâce à quatre capteurs (au maximum) remplaçables par l’utilisateur et à un capteur
de pression intégré. Chaque capteur mesure le paramètre concerné selon diverses méthodes de détection
(électrochimiques, optiques ou physiques). Chaque port accepte et reconnaît automatiquement n’importe quel
type de capteur EXO. Suivant les réglages choisis par l’utilisateur, l’EXO1 va collecter les données, les stocker
dans la sonde, puis les transférer vers une plateforme de collecte des données (DCP), ou les transmettre
directement à un PC de l’utilisateur ou au terminal portatif EXO.
Les utilisateurs communiquent avec la sonde
via un câble de terrain raccordé au terminal
EXO, établissent une connexion sans fil
Bluetooth® avec un PC ou le terminal EXO,
ou une connexion USB (via un adaptateur)
avec un PC.
Caractéristiques
Page 5
Conditions
d’exploitation
Profondeur
Milieu
250 mètres
Eau
Matériau
Xenoy®, Lexan®,
bronze, titane, alliage
cuivre-nickel, acier
inoxydable 316
Capacité de
mémoire interne
512 Mo
Logiciel
Logiciel d’interface Kor
Communications
Sonde
Adaptateurs
Bluetooth, câble de
terrain, USB, RS-485 ;
USB, SDI-12/RS-232
Alimentation
Externe
Interne
9-16 VDC
2 piles type D
Température
Fonctionnement
Stockage
-5°C à 50°C
-20°C à +80°C
Durée de vie des
piles
90 jours environ (cf. page
78)
Dimensions
Diamètre
Longueur
Poids
4,70 cm
64,77 cm
1,65 kg
Ports universels des capteurs
Sonde EXO1
Vue d’ensemble

Page 6
Sonde EXO1
599501
Porte-sonde amovible
599587
Connecteur 6 broches
Joint supérieur du compartiment à
piles
Joints toriques 599680
Compartiment à piles
Couvercle du
compartiment à piles
Joint inférieur du
compartiment à piles
Orifice du capteur de pression
LED rouge – Etat de la sonde
LED bleue - Bluetooth
Commutateur magnétique Marche/Arrêt
Alimentation et Bluetooth
Adaptateur passe-cloison
Capteurs
Port de connexion
599475
Coupelle de calibration
599786
Capot de protection des capteurs
599333, 599563
Masselotte
599471, 599365

La sonde EXO2 est un appareil multi-paramètres qui collecte des données relatives à la qualité de
l’eau. La sonde collecte les données grâce à six capteurs (au maximum) remplaçables par l’utilisateur
et à un capteur de pression intégré. Chaque capteur mesure le paramètre concerné selon diverses
méthodes de détection (électrochimiques, optiques ou physiques). Chaque port accepte et reconnaît
automatiquement n’importe quel type de capteur EXO. Suivant les réglages choisis par l’utilisateur,
l’EXO2 va collecter les données, les stocker dans la sonde, puis les transférer vers une plateforme de
collecte des données (DCP), ou les transmettre à un PC de l’utilisateur ou au terminal portatif EXO via
un câble ou une connexion USB ou Bluetooth.
Outre les six connexions universelles pour capteurs, la sonde EXO2 est également dotée d’un port
central pour un racleur (ou un capteur supplémentaire) et d’un port auxiliaire situé en haut de la
sonde. Le port auxiliaire permettra à l’utilisateur de raccorder l’EXO2 à d’autres sondes EXO.
Page 7
Sonde EXO2
Vue d’ensemble
Les utilisateurs communiquent avec la sonde via un
câble de terrain raccordé au terminal EXO,
établissent une connexion sans fil Bluetooth® avec
un PC ou le terminal EXO, ou une connexion USB
(via un adaptateur) avec un PC.
Caractéristiques
Conditions
d’exploitation
Profondeur
Milieu
250 mètres
Eau
Matériau
Xenoy, Lexan, bronze,
titane, alliage cuivre-
nickel, acier inoxydable
316
Capacité de
mémoire interne
512 Mo
Logiciel
Logiciel d’interface Kor
Communications
Sonde
Adaptateurs
Bluetooth, câble de
terrain, USB, RS-485 ;
USB, SDI-12/RS-232
Alimentation
Externe
Interne
9-16 VDC
4 piles type D
Température
Fonctionnement
Stockage
-5°C à 50°C
-20°C à +80°C
Durée de vie des
piles
90 jours environ (cf. page
80)
Dimensions
Diamètre
Longueur
Poids
7,62 cm
71,1 cm
2,65 kg
Orifice du capteur de
pression
Port pour racleur/capteur
Ports universels des capteurs

Page 8
Sonde EXO2
599502
Porte-sonde amovible
599588
Port auxiliaire
Connecteur 6 broches
Capuchon des piles/soupape de surpression
Joints toriques 599681
Ouverture du compartiment des piles
Compartiment des piles
Commutateur magnétique Marche/Arrêt
Alimentation et Bluetooth
LED rouge – Etat de la sonde
LED bleue- Bluetooth
Adaptateur passe-cloison
Capteurs
Port de connexion
599475
Capot de protection des capteurs
599334, 599564
Coupelle de calibration
599316
Racleur central
599090
Masselotte
599472, 599366

Le terminal portatif EXO est un appareil robuste qui fonctionne selon le principe d’un micro-ordinateur.
Il permet à l’utilisateur d’afficher les valeurs de la sonde, de configurer les sondes, de stocker et
d’extraire les données, ou de transférer les données vers un ordinateur. Doté d’un GPS, d’un
baromètre et d’un système d’exploitation personnalisé, le terminal établit une communication via la
technologie sans fil Bluetooth, un câble de terrain ou un connecteur USB. L’appareil bénéficie d’un
écran à rétro-éclairage réglable pour un confort de visualisation de jour comme de nuit. Préinstallé, le
logiciel KOR facilite les interactions entre tous les utilisateurs et renforce les performances de la
collecte de données.
Page 9
Terminal portatif EXO
Vue d’ensemble
Vue du dessus
Port USB
Haut-parleur
Le microphone sera fonctionnel
plus tard; il n’est pas encore activé
Aimant
Antenne GPS (interne)
Vue arrière
Fixation à trois
trous (1)
Orifice du
baromètre
Fixation
dragonne
Capot des piles
Fixation
dragonne
Caractéristiques
Baromètre
Oui
GPS
Oui
Microphone
Oui
Haut-parleur
Oui
Système
d’exploitation
Windows CE 5.0
Matériau
Polymère, doté de
l’indice de protection
IP 67 selon des tests
en usine
Mémoire
2 Go
Logiciel
Logiciel d’interface Kor
Communications
Bluetooth, câble de
terrain, USB
Alimentation
Interne
4 piles alcalines type C
Température
Fonctionnement
Stockage
-5 à +50°C
-20 à +80°C
Dimensions
Largeur
Longueur
Poids sans les piles
11,9 cm
22,9 cm
0,91 kg

Page 10
Terminal portatif EXO
599150
Voyant Bluetooth
Le Wi-Fi sera fonctionnel plus tard ; il
n’est pas encore activé
Ecran LCD visible en
plein jour
Touches programmables (2)
Menu
Touche Escape/Echapper
Flèches de navigation (4) &
retour
Retour arrière
Tabulation
Alimentation
Luminosité
Clavier alphanumérique
Touche Shift/Changement
Connecteur

La gamme de produits EXO comprend neuf capteurs qui détectent diverses propriétés physiques,
chimiques et biologiques des eaux naturelles. Les capteurs EXO sont conçus pour collecter des
données extrêmement précises dans des conditions ambiantes en constante évolution.
Filtrage des données
Tous les capteurs EXO ont en commun un logiciel intégré qui se charge du filtrage des données en
temps réel. Les capteurs collectent des données à un rythme constant et utilisent ce flux de données
en l’intégrant dans l’algorithme de filtrage qui produit des résultats que l’utilisateur peut visualiser. Les
sondes EXO collectent des données provenant des capteurs EXO ; le débit des données de sortie
peut atteindre 4 Hz. Le processus de filtrage des données comprend quatre éléments :
Filtrage de base par moyenne glissante
Le filtre de base est un filtre à moyenne glissante ou mobile des données collectées antérieurement.
Une nouvelle donnée vient s’ajouter, la valeur la plus ancienne est éliminée, et la somme est divisée
par le nombre total de données. Il s’agit d’une simple moyenne qui est recalculée de façon continue
sur une période donnée.
Filtrage adaptatif
L’inconvénient du filtrage par moyenne glissante est que le temps de réponse à une impulsion est
différé, et plus la somme des valeurs moyennes est longue, plus il faut du temps au résultat pour
converger vers la bonne valeur. Pour corriger cette situation, l’algorithme de filtrage contrôle l’arrivée
des nouvelles données et les compare au résultat moyen en cours d’actualisation, recherchant la
présence d’une impulsion. Lorsque les nouvelles données s’écartent de la moyenne avec une valeur
supérieure à la tolérance prédéfinie, le nombre des entrées de données se trouvant en-dessous de la
moyenne glissante est réduit au minimum et les valeurs restantes sont lissées en utilisant les
nouvelles données. Le résultat est un alignement sur la nouvelle valeur, ce qui élimine totalement le
délai inhérent à la moyenne glissante.
Rejet des valeurs aberrantes
A chaque ajout d’une nouvelle donnée, les entrées qui correspondent à la moyenne mobile sont
analysées pour détecter les valeurs aberrantes. Bien que ces données aient déjà été calculées pour
qu’elles se situent dans la fourchette de tolérance susmentionnée, les plus récalcitrantes ne sont pas
prises en compte dans le calcul de la moyenne glissante. Ce rejet des valeurs aberrantes permet
d’obtenir des résultats plus réguliers.
Stabilité de calibration
Comme indiqué ci-dessus, le filtrage est actif durant la calibration, et en plus, une autre caractéristique
permet à l’utilisateur de faire le point sur la stabilité de la calibration. Lorsque l’utilisateur tente de
calibrer un capteur, les soudaines variations des conditions sont perçues comme des impulsions ou
immersions et le filtrage réagit en conséquence. Les résultats montrent instantanément la valeur de la
solution, et après un certain temps, le filtre s’enclenche progressivement jusqu’au maximum de ses
capacités et fournit les données les plus régulières. Cependant, comme le capteur et la solution
d’étalonnage recherchent un équilibre, une dérive de la mesure peut apparaître petit à petit. Le
capteur va contrôler les résultats du filtre et déterminer si la mesure est stable. Il surveille les résultats
et calcule la pente de chacun des résultats. Dès que la pente se stabilise et est constamment faible
pendant environ 30 secondes, le capteur est considéré comme étant stable. Le logiciel KOR le prend
en compte et la calibration peut continuer.
Page 11
Capteurs EXO
Vue d’ensemble

Temps de réponse des capteurs
Les temps de réponse des capteurs EXO s’appuient sur des essais réalisés en laboratoire. Les temps
de réponse réellement observés sur le terrain peuvent varier selon l’application.
Spécifications relatives à la précision des capteurs
Pour que la précision des capteurs EXO reste intacte, nous recommandons aux utilisateurs de calibrer
les capteurs en laboratoire avec des étalons dont la température est la plus proche possible de celle
du milieu à surveiller.
Page 12

Le capteur de conductivité et de température EXO est utilisable dans une sonde qui couvre la quasi-
totalité des applications. Non seulement ce capteur fournit des données extrêmement précises avec
un temps de réponse très court, mais en plus il offre des performances optimales en matière de
compensation de température avec les autres capteurs EXO. Les données de conductivité sont
utilisées pour calculer la salinité, la conductance spécifique et les matières dissoutes totales, et pour
compenser les variations de la densité de l’eau (en fonction de la température et de la salinité) dans
les calculs de profondeur si un capteur de profondeur est installé.
Page 13
Conductivité/température
Vue d’ensemble du capteur
Cellule de
conductivité
Thermistance
Le capteur de température utilise une thermistance à
haute stabilité, longue durée de vie et à très faible dérive.
(suite à la page suivante)
Caractéristiques
Conductivité
Unités par défaut
microsiemens/centimètre
Température
Fonctionnement
Stockage
-5 à +50°C
-20 à +80°C
Plage
0 à 200 mS/cm
Précision
0-100 mS/cm : ±0,5% de la
lecture ou 0,001 mS/cm,
selon la valeur la plus
grande ; 100-200 mS/cm : ±
1% de la lecture
Réponse
T63<2 sec (cf. page 12)
Résolution
0,0001 à 0,01 mS/cm (en
fonction de la plage de
mesure)
Type de capteur
Cellule à 4 électrodes
nickel
Température
Unités par défaut
°Celsius
Température
Fonctionnement
Stockage
-5 à +50°C
-20 à +80°C
Précision
-5 à 35°C : ±0,01°C
35 à 50°C : ±0,0,5°C
Réponse
T63<1 sec
Résolution
0,001°C
Type de capteur
Thermistance

La résistance de la thermistance varie en fonction de la température. La résistance mesurée est
ensuite convertie en unité de température à l’aide d’un algorithme. Le capteur de température tolère
un étalonnage humide multipoint conforme aux normes NIST et la spécification de la précision
(0,01°C) est valable pour toute la durée de vie supposée du détecteur. Le capteur de température ne
requiert ni calibration ni entretien, mais il est possible d’effectuer et d’enregistrer des contrôles de
précision via le logiciel d’interface KOR.
Electrodes de conductivité
Le capteur de conductivité utilise quatre électrodes internes de nickel pur pour mesurer la
conductance de la solution. Le courant circule entre deux électrodes et les deux autres servent à
mesurer la chute de tension. La chute de tension mesurée est ensuite convertie en une valeur de
conductance en millisiemens (millimhos). Pour la convertir en une valeur de conductivité en
millisiemens par cm (mS/cm), la conductance est multipliée par la constante de la cellule dont l’unité
est l’inverse d’un centimètre (cm-1). La constante de la cellule de conductivité équivaut à environ
5,5/cm ±10%. Dans la plupart des applications, la constante de la cellule est calculée (ou validée)
automatiquement chaque fois que le système est utilisé, à condition que la méthode de calibration soit
bien suivie.
Compensation de la température
Les capteurs EXO sont dotés de thermistances pour une garantie de qualité. Cependant, la
température interne n’est ni enregistrée ni affichée. Le capteur de turbidité requiert la thermistance
interne pour la compensation de température alors que tous les autres capteurs EXO se servent de la
sonde de conductivité/température pour la compensation de température. Pour visualiser et
enregistrer la température, une sonde de conductivité/température doit être installée dans une sonde
EXO.
Page 14

Un capteur EXO mesure la profondeur de l’eau à l’aide d’une jauge extensométrique sans prise d’air.
Un capteur différentiel à jauge extensométrique mesure la pression avec un côté du transmetteur en
contact avec l’eau et l’autre côté dans le vide. Nous calculons la profondeur à partir de la pression
exercée par la colonne d’eau à laquelle nous soustrayons la pression atmosphérique. Les facteurs
ayant une influence sur la mesure de la profondeur sont la pression barométrique, la densité de l’eau
et la température. Un étalonnage à l’air ambiant engendre une « mise à zéro » du capteur par rapport
à la pression barométrique locale. Une variation de la pression barométrique va provoquer un
décalage du zéro à moins que le transmetteur ne soit de nouveau calibré.
Les sondes EXO sont dotées d’orifices d’admission pour permettre à l’eau d’avoir une influence sur la
jauge extensométrique. L’admission de l’EXO1 se trouve dans la partie jaune située entre le
compartiment des piles et la plaquette de la sonde. Les deux petits orifices d’admission de l’EXO2 se
trouvent sur l’adaptateur passe-cloison de la sonde.
Page 15
Profondeur
Vue d’ensemble du capteur
Emplacement du capteur de profondeur
Les capteurs de profondeur ne sont pas situés au centre.
En cas de déploiement de la sonde en position verticale,
il convient de s’assurer que la sonde sera redéployée
dans la même position. Souvent, on peut utiliser un
pointeur à l’intérieur d’un tuyau PVC. En cas de
déploiement horizontal, il faudra veiller à ce que les
redéploiements suivent cette même trajectoire. Ceci est
particulièrement important pour la sonde EXO2 car le
capteur de profondeur est désaxé.
(suite à la page suivante)
Caractéristiques
Unités
PSI, profondeur (m, bar)
Température
Fonctionnement
Stockage
-5 à +50°C
-20 à +80°C
Plage
Peu profond : 10 m
Intermédiaire : 100 m
Profond : 250 m
Précision
Peu profond : ±0,04% FS (0,004 m)
Intermédiaire : ±0,04% FS (0,04 m)
Profond : ±0,04% FS (0,10 m)
Réponse
T63<2 sec (cf. page 12)
Résolution
0,001 m
Type de
capteur
Jauge extensométrique en acier
inoxydable
Admission EXO2
Admission EXO1
Emplacement du capteur de
profondeur par rapport à d’autres
capteurs servant à mesurer la
qualité de l’eau (voir plaquette de
la sonde EXO)
Emplacement du capteur de
profondeur : 27,2 cm par
rapport aux capteurs
mesurant la qualité de l’eau

Page 16
Emplacement du capteur de profondeur (suite)
Pour faciliter le choix d’une orientation horizontale, la
partie supérieure de la sonde EXO2 comporte une
échancrure pour le placement d’un marqueur ou d’un
axe de positionnement.
Une fois la sonde installée, les orifices d’admission
doivent se situer à 1 cm au moins de la surface de
l’eau.
Si un capteur de conductivité est en place, la
profondeur sera compensée automatiquement par
rapport aux variations de la densité de l’eau en
fonction de la température et de la salinité.
Configuration de la profondeur
Les sondes EXO doivent être commandées avec une
profondeur spécifique : 0-10m, 0-100m, 0-250m ou
pas de profondeur. Après la sélection de la
profondeur, il est impossible de modifier le capteur de
profondeur de la sonde.

Le principe de fonctionnement du capteur optique d’oxygène dissous EXO se base sur le concept bien
documenté selon lequel l’oxygène dissous affaiblit l’intensité et le potentiel de la luminescence
associée à un colorant chimique soigneusement choisi. Le capteur d’oxygène dissous EXO émet une
lumière bleue à une longueur d’onde appropriée sur un colorant luminescent qui est immobilisé dans
une matrice en forme de disque. La lumière bleue provoque la luminescence du colorant et la durée
de cette luminescence est mesurée par une photodiode installée dans le capteur. Pour augmenter la
précision et la stabilité de la mesure, le colorant est également irradié par une lumière rouge durant
une partie du cycle de mesure. La valeur mesurée sert de référence pour le calcul de la durée de la
luminescence.
Page 17
Oxygène dissous
Vue d’ensemble du capteur
Capuchon capteur
Capteur sans
capuchon
En l’absence d’oxygène, la durée du signal est maximale.
Lorsque l’oxygène est introduit dans la membrane du
capteur, la durée diminue. Ainsi, la durée de la
luminescence est inversement proportionnelle à la
quantité d’oxygène présent. De plus, la relation entre la
pression d’oxygène disponible à l’extérieur du capteur et
la durée de la luminescence peut être quantifiée avec
l’équation de Stern-Volmer. Pour la plupart des capteurs
optiques d’oxygène dissous qui se basent sur la durée de
la luminescence, cette relation Stern-Volmer
((Tzéro/T) – 1) par opposition à pression O₂
n’est pas tout à fait linéaire (surtout en cas de pression
d’oxygène assez élevée) et les données doivent être
traitées à l’aide d’une analyse de la régression non
linéaire polynômiale.
(suite à la page suivante)
Caractéristiques
Unités
% saturation, mg/L
Température
Fonctionnement
Stockage
-5 à +50°C
-20 à +80°C
Plage
0 à 500% saturation de l’air
0 à 50 mg/L
Précision
0-200%: ±1% de la lecture ou 1% sat.
air, selon la valeur la plus grande;
200-500% : ±5% de la lecture
0-20 mg// : ±1% de la lecture ou 0,1
mg/L ;
20-50 mg// : ±5% de la lecture
Réponse
T63<5 sec (cf. page 12)
Résolution
0,1% saturation de l’air
0,01 mg/L
Type de
capteur
Optique, durée de luminescence

Heureusement, la non-linéarité ne varie pas considérablement en fonction du temps. Tant que le
capteur est caractérisé par rapport à sa réponse à la modification de la pression d’oxygène, la non-
linéarité de la relation n’affecte pas l’aptitude du capteur à mesurer l’oxygène avec précision pendant
une longue période.
Page 18

Le capteur EXO de MODf (Matière Organique Dissoute par fluorescence) est un capteur de
fluorescence qui détecte les composants fluorescents de la MOD (Matière Organique Dissoute)
lorsqu’elle est exposée au proche ultraviolet (UV).
Matière Organique Dissoute Colorée
Il se peut que les utilisateurs veuillent quantifier la matière organique dissoute colorée
(CDOM=Colored Dissolved Oxygen Matter) afin de mesurer la quantité de lumière absorbée par l’eau
colorée et qui n’est donc pas disponible pour le processus de photosynthèse mis en œuvre par les
plantes subaquatiques et les algues. Dans la plupart des cas, la MODf peut se substituer à la CDOM.
Page 19
MODf
Vue d’ensemble du capteur
AVERTISSEMENT
RAYONNEMENT UV
Ne pas regarder
directement le
faisceau lumineux.
Sulfate de quinine
Le sulfate de quinine est un substitut à la MODf. Dans
une solution acide, il devient fluorescent comme la
matière organique dissoute. Les unités de la MODf
correspondent aux unités de sulfate de quinine (QSU) où
1 QSU= 1 ppb de sulfate de quinine. Ainsi, le sulfate de
quinine est réellement un substitut au paramètre CDOM,
et ce à double titre.
Le capteur MODf EXO se caractérise par une linéarité
quasiment parfaite (R²=1,0000) pour une dilution en série
d’une solution incolore de sulfate de quinine. Pour une
dilution en série d’échantillons d’eau colorée qui ont été
prélevés sur le terrain, le capteur montre cependant une
certaine sous-linéarité. Le point de sous-linéarité des
échantillons de terrain est variable et est affecté par
l’absorption UV de la MOD dans l’eau.
(suite à la page suivante)
Caractéristiques
Unités
Equivalents de sulfate de quinine
(ESQ), ppb
Température
Fonctionnement
Stockage
-5 à +50°C
-20 à +80°C
Plage
0 à 300 ppb ESQ
Réponse
T63<2 sec (cf. page 12)
Résolution
0,01 ppb ESQ
Type de
capteur
Optique, fluorescence
Linéarité
R
2
>0,999 pour une dilution en série
de 300 ppb de solution de sulfate
de quinine
Limite de
détection
0,07 ppb ESQ
Optique :
excitation
365±5 nm
Emission
480±40 nm

Une expérimentation a démontré qu’une sous-linéarité pouvait apparaître avec des concentrations
MODf aussi basses que 50 QSU. Ce taux signifie qu’un échantillon de terrain avec un relevé MODf de
140 QSU contiendra bien plus du double d’un échantillon qui affiche 70 QSU. Ce résultat – une bonne
linéarité dans une solution de sulfate de quinine incolore, mais une sous-linéarité dans des
échantillons colorés pris sur le terrain – est aussi constaté avec d’autres capteurs MODf disponibles
sur le marché. Par conséquent, les performances du capteur EXO sont probablement équivalentes à
celles de la concurrence, voire meilleures, mais les capteurs EXO ont l’avantage de s’intégrer
facilement à un appareil multi-paramètre et à un système automatique de nettoyage mécanique
lorsqu’ils sont utilisés dans le cadre d’un suivi des eaux avec une sonde EXO2.
Page 20
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
























































































































Autres documents
-
Extech Instruments 407510 Manuel utilisateur
-
 Pool Technologie JustDosing Duo Manuel utilisateur
Pool Technologie JustDosing Duo Manuel utilisateur
-
 Ultra Products EXO Manuel utilisateur
Ultra Products EXO Manuel utilisateur
-
Extech Instruments SDL150 Manuel utilisateur
-
 Dixneuf Testeur humidité pour bois Manuel utilisateur
Dixneuf Testeur humidité pour bois Manuel utilisateur
-
-
sauermann GP 500 Manuel utilisateur
-
AFRISO Submersible probe DMU 08, DMU 08 T, DMU 09 Mode d'emploi
-
EINHELL GE-DP 5220 LL ECO Product Sheet
-
IFM E33350 Guide d'installation


