AUMA Multi-turn actuators SA 07.2 Mode d'emploi
- Taper
- Mode d'emploi

Contrôle
Parallèle
Profibus DP
Profinet
Modbus RTU
Modbus TCP/IP
→ EtherNet/IP
Foundation Fieldbus
HART
Servomoteurs multitours
SA 07.2 – SA 16.2
SAR 07.2 – SAR 16.2
Bloc de commande : électronique (MWG)
avec commande de servomoteur
AC 01.2 Non-intrusif
Montage et mise en serviceInstructions de service

Lire d’abord les instructions de service !
●Respecter les consignes de sécurité.
●Cette notice fait partie intégrante de l’appareil.
●Conserver la notice pendant la durée de vie de l’appareil.
●Transmettre la notice à chaque utilisateur ou propriétaire successif de l’appareil.
Public concerné :
Ce document contient des informations destinées au personnel chargé du montage, de la mise en service et de
l’entretien.
Documents de référence :
●Manuel (intégration de matériel) de la commande de servomoteur AC 01.2 EtherNet/IP
Les documents de référence sont disponibles sur Internet : http://www.auma.com.
Table des matières Page
51. Consignes de sécurité........................................................................................................... 51.1. Conditions préalables pour la manipulation de ce produit en toute sécurité 51.2. Domaine d’application 61.3. Avertissements et remarques 61.4. Références et symboles
72. Bref descriptif.........................................................................................................................
93. Plaque signalétique................................................................................................................
134. Transport et stockage............................................................................................................ 134.1. Transport 154.2. Stockage
175. Montage................................................................................................................................... 175.1. Position de montage 175.2. Montage du volant 175.3. Montage du servomoteur sur la vanne 185.3.1. Vue d’ensemble des formes d'accouplement 185.3.2. Forme d’accouplement type A 195.3.2.1. Servomoteur multitours avec forme d’accouplement type A : monter 215.3.2.2. Ecrou de tige de la forme d'accouplement type A : usiner 225.3.3. Formes d'accouplement types B/C/D et E 235.3.3.1. Montage du servomoteur multitours avec forme d’accouplement type B 245.4. Accessoires de montage 245.4.1. Tube de protection de tige pour tige de vanne montante 255.5. Positions de montage de la commande locale 255.5.1. Positions de montage : modifier
276. Raccordement électrique...................................................................................................... 276.1. Vue d’ensemble de raccordements électriques AUMA 276.2. Remarques fondamentales 306.3. Raccordement électrique SJ (multiconnecteur AUMA) 316.3.1. Ouvrir le boîtier de raccordement (pour raccordement secteur) 326.3.2. Connexion des câbles 336.3.3. Fermer le boîtier de raccordement (pour raccordement secteur)
2
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Table des matières AC 01.2 Non-intrusif EtherNet/IP

346.3.4. Boîte de raccordement bus de terrain : ouvrir 346.3.5. Câble Ethernet industriel : relier 356.3.6. Boîte de raccordement bus de terrain : fermer 366.4. Version compacte raccordement électrique SF pour EtherNet/IP 376.4.1. Boîtier de raccordement (pour raccordement secteur) : ouvrir 386.4.2. Connexion des câbles 396.4.3. Boîtier de raccordement (pour raccordement secteur) : fermer 406.4.4. Câble Ethernet industriel : relier 406.5. Accessoires pour raccordement électrique 406.5.1. Commande de servomoteur sur support mural 416.5.2. Support temporaire 426.5.3. Dispositif intermédiaire DS pour double étanchéité 426.5.4. Prise de terre extérieure
437. Fonctionnement..................................................................................................................... 437.1. Fonctionnement manuel 437.1.1. Commande manuelle de la vanne 447.2. Fonctionnement moteur 447.2.1. Manœuvre locale du servomoteur 457.2.2. Marche du servomoteur à distance 457.3. Navigation du menu via boutons-poussoirs (pour réglages et affichages) 467.3.1. Architecture et navigation 477.4. Niveau d'utilisateur, mot de passe 487.4.1. Mot de passe : entrer 487.4.2. Mots de passe : modifier 497.4.3. Timeout en cas de saisie incorrecte du mot de passe 497.5. Langue à l'écran 497.5.1. Langue d'affichage : modifier
518. Indications.............................................................................................................................. 518.1. Affichages lors de la mise en service 528.2. Affichages sur l'écran 528.2.1. Signaux de recopie du servomoteur et de la vanne 558.2.2. Affichages d'état selon la catégorie AUMA 558.2.3. Affichages d'état selon la recommandation NAMUR 578.3. Voyants d’indication de la commande locale 588.4. Affichages optionnels 588.4.1. Indicateur de position mécanique via repère sur le couvercle (sans auto-réglage) 588.4.2. Indicateur de position mécanique (auto-réglage)
599. Signaux (signaux de sortie).................................................................................................. 599.1. Signaux d'état via contacts de sortie (sorties numériques) 599.1.1. Affectation des sorties 599.1.2. Codage des sorties 599.2. Signaux analogique (sorties analogiques)
6010. Mise en service (réglages de base)...................................................................................... 6010.1. Type d'arrêt : régler 6110.2. Limiteurs de couple : régler 6310.3. Contacts fin de course : régler 6510.4. Connexion entre la passerelle EtherNet/IP et l’ordinateur : vérifier 6510.5. Passerelle EtherNet/IP : configurer 6710.6. Manœuvre d’essai
3
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Table des matières

6710.6.1. Vérifier le sens de rotation sur indicateur de position mécanique 6910.6.2. Sens de rotation sur l’arbre creux/tige : vérifier 6910.6.3. Contacts fin de course : vérifier
7111. Mise en service (réglages/options dans le servomoteur).................................................. 7111.1. Boîtier de commande : ouvrir/fermer 7211.2. Indicateur de position mécanique (auto-réglage) 7211.2.1. Indicateur de position mécanique : régler 7311.2.2. Palier d’engrenage du réducteur interne : vérifier/régler 7411.3. Indicateur de position mécanique via repère sur le couvercle (sans auto-réglage) 7411.3.1. Réglage de l’indicateur de position mécanique 7511.3.2. Palier d'engrenage du réducteur : vérifier/régler
7812. Elimination des défauts......................................................................................................... 7812.1. Défauts lors de la mise en service 7812.2. Signaux de défauts et alarmes 8212.3. Fusibles 8212.3.1. Fusibles dans la commande de servomoteur 8312.3.2. Remplacer fusibles 8312.3.2.1. Remplacer fusibles F1/F2 8412.3.2.2. Vérifier/remplacer fusibles F3/F4 8412.3.3. Protection moteur (surveillance thermique)
8613. Entretien et maintenance....................................................................................................... 8613.1. Mesures préventives pour l’entretien et le fonctionnement en toute sécurité 8713.2. Maintenance 8713.3. Elimination et recyclage des matériaux
8814. Données techniques.............................................................................................................. 8814.1. Données techniques Servomoteur multitours 9014.2. Données techniques Commande de servomoteur 9614.3. Couples de serrage pour vis
9715. Liste de pièces de rechange................................................................................................. 9715.1. Servomoteurs multitours SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2 9915.2. Commandes de servomoteur AC 01.2 avec raccordement électrique SJ 10115.3. Commande de servomoteur AC 01.2 SF compact
105Index........................................................................................................................................
4
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Table des matières AC 01.2 Non-intrusif EtherNet/IP

1. Consignes de sécurité
1.1. Conditions préalables pour la manipulation de ce produit en toute sécurité
Normes/directives L'exploitant et le constructeur du système doivent veiller à satisfaire à toutes les
exigences, directives, prescriptions, régulations et recommandations nationales
concernant le montage, le raccordement électrique ainsi que la mise en service et
le fonctionnement sur site.
Ceci comprend entre autres :
●Directives d’installation appropriées pour des applications de réseaux.
Consignes de sécurité/
avertissements Le personnel travaillant sur cet appareil doit se familiariser avec les références de
sécurité et d’avertissement de la présente notice et respecter les consignes stipulées.
If faut prêter attention aux consignes de sécurité et aux panneaux avertisseurs sur
l'appareil afin d’éviter des dommages corporels et matériels.
Qualification du person-
nel L'installation, le raccordement électrique, la mise en service, l'opération et les travaux
de maintenance ne doivent être réalisés que par du personnel qualifié et ayant été
autorisé par l'exploitant ou le constructeur du système.
Avant toute intervention sur cet appareil, le personnel doit avoir lu et compris cette
notice mais également connaître et respecter les prescriptions reconnues de la
sécurité au travail.
Mise en service Avant la mise en service, il faut vérifier la conformité de tous les réglages avec les
requis de l'installation.Tout réglage incorrect pourrait occasionner des dommages
sur la robinetterie et/ou sur l'installation. Le fabricant dégage toute responsabilité
pour des dommages résultants de mauvais réglages. L'utilisateur est seul
responsable.
Fonctionnement Conditions préalables pour un fonctionnement durable et en toute sécurité :
●Transport et stockage dans de bonnes conditions, montage et installation de
qualité, mise en service soignée.
●N'utiliser l'appareil que lorsqu'il est en parfait état, tout en respectant cette notice.
●Tout défaut ou détérioration doit être immédiatement signalé et corrigé.
●Respecter les règles de sécurité au travail.
●Respecter les réglementations nationales en vigueur.
●Pendant le fonctionnement, le carter chauffe et peut générer des températures
de surface > 60 °C. Avant toute intervention sur l’appareil et pour protéger contre
toute brûlure éventuelle, nous recommandons de vérifier la température de
surface à l'aide d'un thermomètre approprié et de porter des gants de protection.
Mesures de protection La prise de mesures de protection requises sur site, comme p.ex. capots, barrières
de sécurité ou port des équipements de protection individuelle pour tous les
intervenants incombe à l’exploitant ou au constructeur du système.
Maintenance Afin de garantir la parfaite fonctionnalité de l'appareil, les références de maintenance
incluses dans cette notice doivent être respectées.
Toute modification sur l’appareil est interdite sans l'accord préalable et écrit du
fabricant.
1.2. Domaine d’application
Les servomoteurs multitours AUMA SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2 sont
conçus pour manœuvrer les vannes industrielles, par exemple les robinets à soupape,
les robinets-vannes, les robinets papillon et les robinets à tournant sphérique.
D’autres conditions d’utilisation ne sont permises qu'après confirmation explicite (et
écrite) du fabricant.
L’utilisation dans les cas de figures suivants n’est pas autorisée :
5
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Consignes de sécurité

●Chariots de manutention EN ISO 3691
●Appareils de levage selon EN 14502
●Elévateurs de personnes (ascenseurs) selon DIN 15306 et 15309
●Elévateurs d’objets (monte-charge) selon EN 81-1/A1
●Escalateurs
●Fonctionnement en continu
●Service enterré
●Service immergé permanent (respecter l’indice de protection)
●Atmosphères explosibles
●Zones exposées à l’irradiation dans des installations nucléaires
Lors d’une utilisation inappropriée ou involontaire, toute responsabilité sera déclinée.
Le respect de cette notice fait partie des conditions d’utilisation.
Information Cette notice ne s'applique qu'à la version « FERMETURE sens horaire », c’est-à-dire
que l’arbre de sortie tourne dans le sens horaire pour fermer la vanne.
1.3. Avertissements et remarques
Pour la mise en évidence des processus importants relatifs à la sécurité au sein de
cette notice, les avertissements et remarques suivants sont identifiés par le mot de
signalisation approprié (DANGER, AVERTISSEMENT, ATTENTION, AVIS).
Des évènements immédiatement dangereux à risque élevé. Le non-respect de
l'avertissement entraîne la mort ou peut grièvement nuire à la santé.
Des évènements dangereux probables à risque moyen. Le non-respect de
l'avertissement peut entraîner la mort ou grièvement nuire à la santé.
Des évènements dangereux probables à risque modéré. Le non-respect de
l’avertissement pourrait provoquer des blessures légères ou moyennes. Peut
également être utilisé en relation avec des dommages matériels.
Situation possiblement dangereuse. Le non-respect de cet avertissement
pourrait entraîner des dommages matériels. N’est pas utilisé pour signaler
des dommages aux personnes.
Le symbole de sécurité met en garde d'un risque de blessures.
Le mot de signalisation (ici : DANGER) indique le degré du danger.
1.4. Références et symboles
Les références et symboles suivants sont utilisés dans cette notice :
Information Le terme Information précédant le texte fournit des remarques et informations.
Symbole pour FERME (vanne fermée)
Symbole pour OUVERT (vanne ouverte)
Accès au paramètre à l’aide du menu
Décrit la navigation dans le menu pour atteindre le paramètre. Les boutons-poussoirs
sur la commande locale permettent une localisation rapide à l’affichage du paramètre
recherché. Les textes d’affichages sont représentés sur un fond gris : Affichage.
➥Résultat d’une action
Décrit le résultat d’une action précédente.
6
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Consignes de sécurité AC 01.2 Non-intrusif EtherNet/IP

2. Bref descriptif
Servomoteur multitours Définition selon EN 15714-2/EN ISO 5210:
Un servomoteur multitours est un servomoteur qui transmet un couple à une vanne
sur une course de 360° minimum.
Servomoteur multitours
AUMA Figure 1 : AUMA servomoteur multitours SA 10.2
[1] Servomoteur multitours avec moteur et volant
[2] Commande de servomoteur
[3] Commande locale avec écran d’affichage, (a) sélecteur et (b) bouton-poussoir
[4] Bride de fixation vanne, p.ex. forme d'accouplement type A
Les servomoteurs multitours AUMA SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2 sont
manœuvrés par un moteur électrique. Un volant est disponible pour le réglage ou
la manœuvre d’urgence.
L’arrêt en positions finales peut être effectué par contacts fin de course ou limiteurs
de couple.
Une commande de servomoteur est impérativement requise pour manœuvrer le
servomoteur et traiter les signaux de ce dernier.
En version intrusive (bloc de commande : électromécanique), le réglage des contacts
fin de course et du limiteur de couple se fait à l'aide d'interrupteurs dans le
servomoteur.
En version non-intrusive (bloc de commande : électronique), le réglage des contacts
fin de course et du limiteur de couple se fait à l'aide de la commande de la commande
sans l'ouverture du carter du servomoteur ou de la commande de servomoteur. A
cet effet, le servomoteur est équipé d’un MWG (transmetteur magnétique de position
et de couple) fournissant également une recopie de couple/affichage de couple
analogique et une recopie de position/affichage de position analogique au niveau
de la sortie de la commande de servomoteur.
Le servomoteur est capable de supporter un effort axial en combinaison avec la
forme d'accouplement type A.
Commande de servomo-
teur La commande de servomoteur AC 01.2 peut être montée directement sur le
servomoteur ou séparément sur un support mural.
Le servomoteur peut être opéré à l’aide des boutons-poussoirs de la commande
locale de la commande de servomoteur. Des réglages de menu de la commande
de servomoteur peuvent également être effectués. L’écran affiche des informations
relatives au servomoteur et aux réglages menu.
Les fonctions de la commande de servomoteur permettent d’effectuer des manœuvres
en OUVERTURE - FERMETURE, les contrôles de position, de processus,
d'enregistrement de données ainsi que des fonctions de diagnostic et encore le
contrôle via différentes interfaces (p.ex. bus de terrain, Ethernet et HART).
7
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Bref descriptif

Application et logiciel
Des données relatives au servomoteur peuvent être téléchargées, des réglages
modifiés et sauvegardés à l’aide du logiciel AUMA CDT pour des ordinateurs
Windows (portables ou tablettes) et à l’aide de l’application AUMA Assistant. La
connexion entre l'ordinateur et le servomoteur AUMA est alors réalisée sans fil via
interface Bluetooth. AUMA Cloud est une plateforme interactive pour collecter et
évaluer des données d’appareil détaillées de tous les servomoteurs au sein d’une
installation, par exemple.
Figure 2 : Communication via Bluetooth
AUMA CDT AUMA CDT est un logiciel de réglage et d’utilisation simple et convivial pour les
servomoteurs AUMA.
Le logiciel AUMA CDT est disponible en téléchargement gratuit via notre site
internet : www.auma.com
AUMA Cloud
AUMA Cloud est l’épicentre numérique du monde AUMA. Il agit en tant que plateforme
pour une gestion efficace et économique de la maintenance des servomoteurs AUMA.
AUMA Cloud permet de collecter toutes les données de tous les servomoteurs au
sein d’une installation afin de fournir une vue d’ensemble très claire. Des analyses
détaillées fournissent des informations sur une maintenance éventuellement requise.
Des fonctions supplémentaires facilitent la gestion des appareils (Asset Management).
Appli AUMA Assistant
L’appli AUMA Assistant permet le réglage et le diagnostic à distance de servomoteurs
AUMA via Bluetooth en utilisant un smartphone ou une tablette.
L’application AUMA Assistant est disponible en téléchargement gratuit sur Google
Play Store (Android) ou App Store (iOS).
Figure 3 : Lien vers l’application AUMA Assistant
8
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Bref descriptif AC 01.2 Non-intrusif EtherNet/IP

3. Plaque signalétique
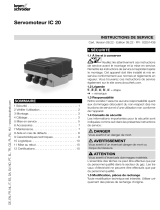
Figure 4 : Disposition des plaques signalétiques
[1] Plaque signalétique du servomoteur
[2] Plaque signalétique de la commande du servomoteur
[3] Plaque signalétique du moteur
[4] Plaque supplémentaire, p.ex. plaque du numéro d’identification KKS
Plaque signalétique du servomoteur
Figure 5 : Plaque signalétique du servomoteur (exemple)
(= logo du fabricant) ; (= marquage CE)
[1] Nom du fabricant
[2] Adresse du fabricant
[3] Désignation du type
[4] Numéro de commande
[5] N° de série
[6] Vitesse de sortie
[7] Plage de couple en direction FERMETURE
[8] Plage de couple en direction OUVERTURE
[9] Type de lubrifiant
[10] Température ambiante admissible
[11] Attribution selon spécification client
[12] Indice de protection
[13] Code Datamatrix
9
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Plaque signalétique

Plaque signalétique de la commande du servomoteur
Figure 6 : Plaque signalétique de la commande de servomoteur (exemple)
[1] Désignation du type
[2] Numéro de commande
[3] Numéro de série
[4] Schéma de raccordement du servomoteur
[5] Schéma de raccordement de la commande de servomoteur
[6] Tension du secteur
[7] Classe de puissance AUMA pour contacteurs
[8] Température ambiante admissible
[9] Indice de protection
[10] Contrôle
[11] Code Datamatrix
Plaque signalétique du moteur
Figure 7 : Plaque signalétique du moteur (exemple)
(= logo du fabricant) ; (= marquage CE)
[1] Type de moteur
[2] N° d’article du moteur
[3] N° de série
[4] Type de courant, tension du secteur
[5] Puissance nominale
[6] Courant nominal
[7] Type de service
[8] Indice de protection
[9] Protection moteur (protection de température)
[10] Classe d'isolation
[11] Vitesse de sortie
[12] Facteur de puissance cos phi
[13] Fréquence d'alimentation secteur
[14] Code Datamatrix
10
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Plaque signalétique AC 01.2 Non-intrusif EtherNet/IP

Descriptions relatives aux indications de la plaque signalétique
Désignation du type Tableau 1 :
Description de la désignation du type (à l’exemple de SA 07.2 - F07)
-F1007.2SA
Type SA = Servomoteurs multitours pour service tout-ou-rien (TOR)
Type SAR = Servomoteurs multitours pour service régulation
SA
Taille
Cette notice est valable pour les tailles 07.2, 07.6, 10.2, 14.2, 14.6, 16.2
07.2
Taille de brideF10
Tableau 2 :
Description de la désignation du type (à l’exemple de AC 01.2)
01.2AC
Type AC = Commande de servomoteur AUMATICAC
Taille 01.201.2
Numéro de commande Ce numéro sert à identifier le produit et à déterminer les données techniques relatives
à l'appareil.
Nous vous prions de toujours mentionner ce numéro pour toute demande de
renseignement.
Sur notre site internet http://www.auma.com > SAV & Support >myAUMA, nous
offrons un service permettant à tout utilisateur autorisé de télécharger les documents
relatifs à la commande après saisie du numéro de commande : schémas de câblage,
données techniques (en allemand et anglais), des certificats de réception, les
instructions de service et autres informations utiles.
Numéro de série du ser-
vomoteur Tableau 3 :
Description du numéro de série (à l'exemple de 0520MD12345)
MD123452005
Positions 1 et 2 : Semaine de montage = semaine 0505
Positions 3+4 : Année de fabrication = 202020
Numéro interne pour identification explicite du produitMD12345
Schéma de raccordeme-
nt du servomoteur Position 9 après TPA :Version du positionneur
I, Q = MWG (transmetteur magnétique de position et de couple)
Classe de puissance
AUMA pour contacteurs Les contacteurs utilisés dans les commandes de servomoteur (contacteurs
inverseurs/thyristors sont divisés dans les classes de puissance AUMA (p.ex. A1,
B1, ...). La classe de puissance indique la puissance maximum assignée (du moteur)
du contacteur. La puissance assignée (puissance nominale) du moteur de la
commande est spécifiée sur la plaque signalétique du moteur en kW. Se reporter
aux fiches de Données électriques séparées pour l'affectation des classes de
puissance AUMA aux puissances nominales des types de moteurs.
Pour les contacteurs sans affectation de classe de puissance, la plaque signalétique
de la commande de servomoteur n'indique pas la classe de puissance mais la
puissance assignée maxi. directement en kW.
Contrôle Tableau 4 :
Exemples de contrôle (indications sur la plaque signalétique de la commande de servomoteur)
DescriptionSignal d'entrée
Contrôle via interface EtherNet/IPEtherNet/IP
Contrôle via interface EtherNet/IP et tension de contrôle pour contrôle OUVER-
TURE - FERMETURE via entrées numériques (OUVERTURE, ARRET,
FERMETURE)
EtherNet/IP/24 V DC
11
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Plaque signalétique

Code Datamatrix Notre application AUMA Assistant vous permet de scanner le code Datamatrix.
En tant qu'utilisateur autorisé, vous accédez directement aux documents relatifs à
la commande du produit. La saisie du numéro de commande ou de série n'est pas
nécessaire.
Figure 8 : Lien vers l’application AUMA Assistant :
Pour d’autres prestations de SAV & Support, Logiciels/Applications/... cf.
www.auma.com.
12
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Plaque signalétique AC 01.2 Non-intrusif EtherNet/IP

4. Transport et stockage
4.1. Transport
Servomoteur Effectuer le transport sur le lieu d’installation dans un emballage solide.
Charge suspendue !
Mort ou lésions graves.
→NE PAS se placer sous une charge suspendue.
→Fixer les élingues ou le crochet de levage sur le carter et NON sur le volant.
→Pour les servomoteurs montés sur une vanne : Fixer les élingues ou le crochet
de levage sur la vanne et NON sur le servomoteur.
→Pour les servomoteurs montés sur des réducteurs : Fixer les élingues ou le
crochet de levage avec des anneaux de levage sur le réducteur et NON sur le
servomoteur.
→Pour les servomoteurs montés sur des commandes de servomoteur : Fixer les
élingues ou le crochet de levage sur le servomoteur et NON sur la commande.
→Respecter le poids total de la combinaison (servomoteur, commande de servo-
moteur, réducteur, vanne)
→Protéger la charge contre chute, dérive ou basculement.
→Effectuer un levage d’essai, éliminer tout danger potentiel p.ex. par basculement.
Figure 9 : Exemple : Soulever le servomoteur
Poids Tableau 5 :
Poids de la commande de servomoteur AC 01.2
Poids env. [kg]avec raccordement électrique du type :
7Multiconnecteur AUMA avec connexion par vis
13
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Transport et stockage

Tableau 6 :
Poids des servomoteurs multitours SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2
avec moteurs triphasés
Poids2)
Type de moteur1)
Désignation du type
Servomoteur env. [kg]
19VD...SA 07.2/
SAR 07.2 20AD...
20VD...SA 07.6/
SAR 07.6 21AD...
22VD...SA 10.2/
SAR 10.2 25AD...
44VD...SA 14.2/
SAR 14.2 48AD...
46VD...SA 14.6/
SAR 14.6 53AD...
67VD...SA 16.2/
SAR 16.2 83AD...
Cf. plaque signalétique du moteur1) Poids indiqué comprend le servomoteur multitours AUMA NORM avec moteur triphasé, raccorde-
ment électrique standard, forme d'accouplement type B1 et volant. Respecter des poids suppléme-
ntaires pour d’autres formes d'accouplement.
2)
Tableau 7 :
Poids des servomoteurs multitours SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2
avec moteurs monophasés
Poids2)
Type de moteur1)
Désignation du type
Servomoteur env. [kg]
21VB...SA 07.2/
SAR 07.2 21VE...
28AE...
21VB...SA 07.6/
SAR 07.6 25VE...
28AE...
37AC...
28VE...48-4...SA 10.2/
SAR 10.2 31VE...48-2...
40AC... 56-4...
43AC... 56-2...
59VE...SA 14.2/
SAR 14.2 61VC...
63AC...
63VE...SA 14.6/
SAR 14.6 66VC...
Cf. plaque signalétique du moteur1) Poids indiqué comprend le servomoteur multitours AUMA NORM avec moteur monophasé, raccor-
dement électrique standard, forme d'accouplement type B1 et volant. Respecter des poids supplé-
mentaires pour d’autres formes d'accouplement.
2)
14
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Transport et stockage AC 01.2 Non-intrusif EtherNet/IP

Tableau 8 :
Poids des servomoteurs multitours SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2
avec moteurs à courant continu
Poids2)
Type de moteur1)
Désignation du type
Servomoteur env. [kg]
29FN... 63-...SA 07.2/
SAR 07.2 32FN... 71-...
30FN... 63-...SA 07.6/
SAR 07.6 44FN... 80-...
33FN... 63-...SA 10.2/
SAR 10.2 36FN... 71-...
56FN... 90-...
68FN... 71-... / FN... 80-...SA 14.2/
SAR 14.2 100FN... 90-...
76FN... 80-... / FN... 90-...SA 14.6/
SAR 14.6 122FN... 112-...
123FN... 100-...SA 16.2/
SAR 16.2
Cf. plaque signalétique du moteur1) Poids indiqué comprend le servomoteur multitours AUMA NORM avec moteur à courant continu,
raccordement électrique standard, forme d'accouplement type B1 et volant. Respecter des poids
supplémentaires pour d’autres formes d'accouplement.
2)
Tableau 9 :
Poids des formes d’accouplement types
[kg]Taille de brideDésignation du type
1,1F07A 07.2
1,1F07A 07.2
1,3F10
2,8F10A 10.2
6,8F14A 14.2
11,7F16A 16.2
Tableau 10 :
Poids des formes d’accouplement types
[kg]Taille de brideDésignation du type
5,2F10AF 07.2
5,2F10AF 07.6
5,5F10AF 10.2
13,7F14AF 14.2
23F16AF 16.2
4.2. Stockage
Risque de corrosion par mauvais stockage !
→Stocker dans un endroit sec et ventilé.
→Protéger de l’humidité du sol par un stockage sur rayonnage ou sur palette bois.
→Protéger les surfaces de la poussière et des salissures.
→Appliquer une protection anti-corrosion sur les surfaces non peintes.
15
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Transport et stockage

Risque de dommages par températures excessivement basses !
→La commande de servomoteur peut être stockée en permanence jusqu’à une
température de –30 °C.
→Sur demande et pendant des courts délais, la commande de servomoteur peut
être transportée en cas spécifiques à des températures jusqu’à –60 °C.
Stockage prolongé En cas de stockage prolongé (plus de 6 mois), veuillez respecter les points suivants :
1. Avant le stockage :
Protéger les surfaces non peintes, en particulier les pièces d’accouplement et
la surface de montage, à l’aide d’un produit anti-corrosion à effet durable.
2. Dans un intervalle de 6 mois :
Contrôle de l'état de corrosion. Dès l’apparition des premiers signes de corro-
sion, appliquer une nouvelle protection anti-corrosion.
16
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Transport et stockage AC 01.2 Non-intrusif EtherNet/IP

5. Montage
5.1. Position de montage
Lors de l’utilisation de graisse pour lubrification, le produit décrit ci-dessous peut être
opéré dans n’importe qu’elle position de montage.
Lors de l’utilisation d’huile au lieu de graisse dans le carter du réducteur dans le
servomoteur, il faut impérativement respecter la position de montage verticale avec
la bride se dirigeant vers le bas. Le lubrifiant utilisé est référencé sur la plaque
signalétique du servomoteur (abréviation F...= graisse ; O...= huile).
5.2. Montage du volant
Afin d’éviter des dommages de transport, les volants sont fournis séparément si
nécessaire. Dans ce cas, il faut monter le volant avant la mise en service.
Figure 10 :Volant
[1] Entretoise
[2] Arbre d’entrée
[3] Volant
[4] Circlip
Procédure 1. Si requis, placer l'entretoise [1] sur l'arbre d'entrée [2].
2. Placer le volant [3] sur l'arbre d'entrée.
3. Fixer le volant [3] à l'aide du circlip [4].
Information : Le circlip [4] est joint aux instructions de service qui sont livrées
dans une pochette résistante, attachée à l'appareil.
5.3. Montage du servomoteur sur la vanne
Formation de corrosion par peinture endommagée et condensation d'eau !
→Effectuer les retouches de peinture après toute intervention sur l’appareil.
→Effectuer le raccordement électrique immédiatement après le montage afin
d’assurer que la résistance de chauffage réduise tout risque de condensation.
17
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Montage

5.3.1. Vue d’ensemble des formes d'accouplement
Tableau 11 :Vue d’ensemble des formes d’accouplement MontageDescriptionApplicationForme d'accouple-
ment
➭page 19, Servomoteur multitours
avec forme d’accouplement type A
: monter
➭page 18, Forme d’accouplement type
A
●pour tige montante non-tournante
●pour supporter la poussée
●inapproprié pour supporter un effort
radial
A
➭page 23, Montage du servomo-
teur multitours avec forme d’accou-
plement type B
➭page 22, Formes d'accouplement
types B/C/D et E
●pour tige tournante, non-montante
●inappropriées pour supporter la pous-
sée
B, B1 – B4
C
D
E
5.3.2. Forme d’accouplement type A
Figure 11 : Forme d’accouplement type A
[1] Bride de fixation vanne
[2] Ecrou de tige
[3] Tige de la vanne
Bref descriptif La forme d'accouplement type A comprend la bride de fixation vanne [1] avec un
écrou de tige axial [2]. L’écrou de tige transmet le couple de l’arbre creux du
servomoteur à la tige de la vanne [3]. La forme d’accouplement type A est capable
de supporter un effort axial.
Pour adapter les servomoteurs aux formes d'accouplement de type A disponibles
sur site aux tailles de bride F10 et F14 des années 2009 et précédentes, un
adaptateur est requis. Cet adaptateur peut être commandé chez AUMA.
18
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Montage AC 01.2 Non-intrusif EtherNet/IP

5.3.2.1. Servomoteur multitours avec forme d’accouplement type A : monter
1. Si la forme d'accouplement type A est déjà montée au servomoteur multitours
: Dévisser les vis [3] au servomoteur multitours et retirer la forme d’accouple-
ment type A [2].
Figure 12 : Servomoteur multitours avec forme d’accouplement type A
[1] Servomoteur multitours
[2] Forme d'accouplement type A, de gauche à droite :
avec écrou de tige machiné, sans alésage ou avec alésage
[3] Vis au servomoteur multitours
Information L’écrou de tige sans alésage ou avec alésage uniquement doit être machiné pour
adopter la tige de vanne avant de pouvoir continuer l’étape suivante :➭page 21,
Ecrou de tige de la forme d'accouplement type A : usiner
2. Appliquer une fine pellicule de graisse sur la tige de la vanne.
3. Positionner la forme d'accouplement type A [2] sur la tige de la vanne et visser
jusqu'à l'appui parfait sur la bride de la vanne [4].
4. Tourner la forme d’accouplement type A [2] jusqu’à l’alignement des trous de
fixation.
5. Serrer les vis [5] entre la vanne et la forme d’accouplement A [2] sans les serrer
complètement.
Figure 13 :
19
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
AC 01.2 Non-intrusif EtherNet/IP Montage

6. Placer le servomoteur multitours sur la tige de la vanne de manière à ce que
les tenons de l'écrou de tige s'enclenchent dans la douille d’accouplement axe
claveté femelle.
Figure 14 :
➥Lors du bon enclenchement, les brides s’alignent parfaitement.
7. Positionner le servomoteur multitours jusqu'à l'alignement des trous de fixation.
8. Fixer le servomoteur multitours à l’aide de vis [3].
9. Serrer les vis [3] diamétralement opposées au couple selon tableau.
Tableau 12 :
Couples de serrage pour vis
Couple de serrage [Nm]Filetage
Classe de résistance A2-80/A4–80
24M8
48M10
200M16
392M20
10. Tourner le servomoteur multitours en commande manuelle en direction OUVER-
TURE jusqu'à ce que la forme d'accouplement type A [2] repose parfaitement
sur la bride de la vanne.
Figure 15 :
11. Serrer les vis [5] diamétralement opposées entre la vanne et la forme d’accou-
plement type A au couple selon le tableau.
20
SA 07.2 – SA 16.2 / SAR 07.2 – SAR 16.2 Bloc de commande : électronique (MWG)
Montage AC 01.2 Non-intrusif EtherNet/IP
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108












































































































AUMA Multi-turn actuators SA 07.2 Mode d'emploi
- Taper
- Mode d'emploi
Documents connexes
Autres documents
-
Honeywell Servomoteurs Modutrol IV Série 90 Mode d'emploi
-
-
 Hydroworks 8607400 Le manuel du propriétaire
Hydroworks 8607400 Le manuel du propriétaire
-
 Kromschroder IC 20 Mode d'emploi
Kromschroder IC 20 Mode d'emploi
-
Fisher Positionneur numérique DVC2000 FIELDVUE (DVC2000 Digital Valve Controller) Manuel utilisateur
-
-
Bushnell 78-8850 Manuel utilisateur
-
Tasco Spacestation 49076525/49114675 Manuel utilisateur
-
Bushnell 78-8845 Manuel utilisateur
-
Bushnell NorthStar Goto- 78-8846 Manuel utilisateur

