Français
INTEGRAL+ / POSIGAM +
Prise en main rapide
Réglage POSIGAM+
Remonter la carte potentiomètre sur l’axe du bloc
de cames si elle a été démontée lors du réglage
des cames de fin de course.
Brancher un milliampèremètre sur les bornes 31
et 32.
31(-) et 32(+)
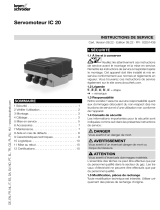
Ouvrir le boitier pour voir apparaitre la carte du
positionneur (GAM-K)
Cette carte est située
à 90° de la commande
locale.
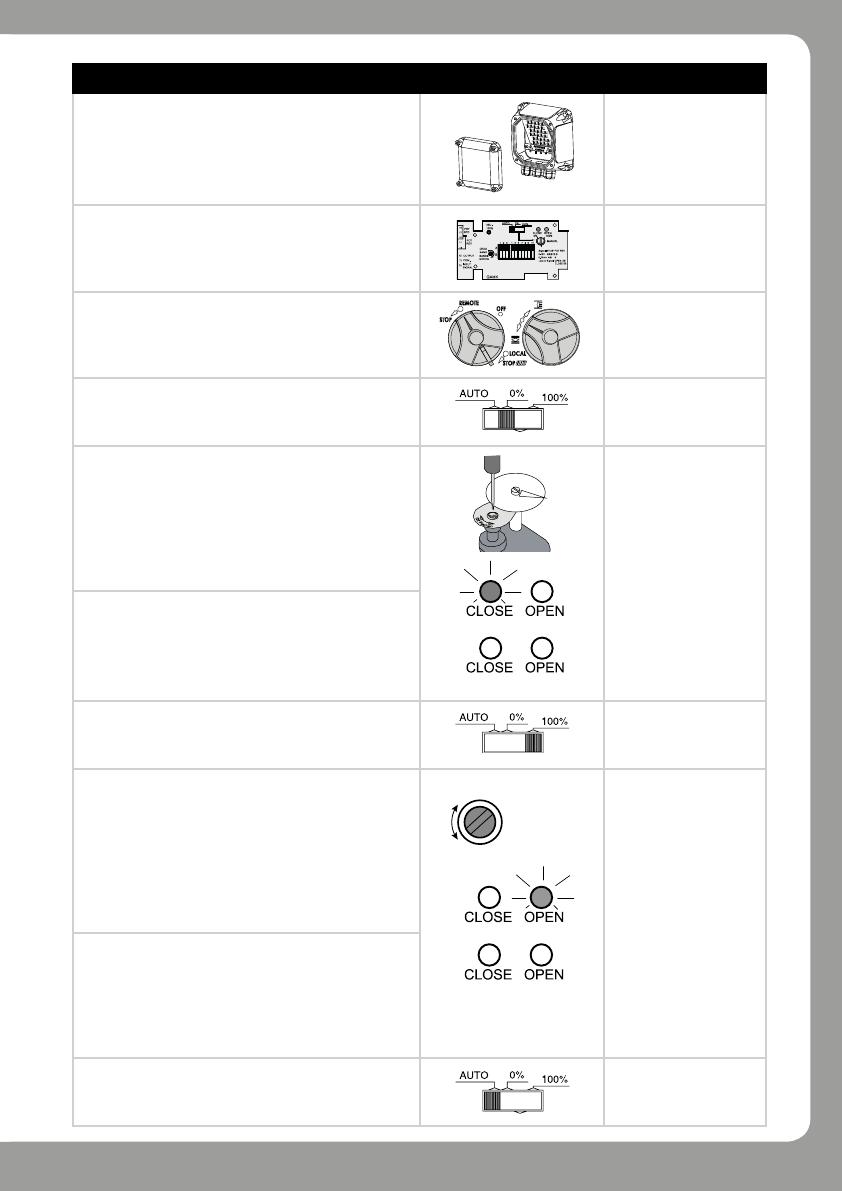
Mettre le sélecteur rouge sur position REMOTE
La commande locale
devient impossible
Basculer le commutateur de commande manuelle
sur la position 0% pour que le servomoteur reçoive
un ordre de fermeture (équivalent à 4mA).
Rotation en sens
‘Fermeture’
Cas N°1: Le servomoteur part en fermeture
et s’arrête sans actionner le contact de fin de
course fermeture. Tourner le potentiomètre du
servomoteur progressivement pour amener le
servomoteur sur le contact de fin de course,
voyant allumé. Tourner lentement le potentiomètre
en sens inverse jusqu’à éteindre le voyant rouge.
Le 0% est synchronisé.
Vérifier le signal de
recopie mesuré entre
les bornes 31 et 32
(4mA variable selon
réglage)
Cas N°2: Le servomoteur part en fermeture,
s’arrête sur le fin de course fermeture et le voyant
de fermeture est toujours allumé. Tourner le
potentiomètre du servomoteur progressivement
pour éteindre le voyant de fermeture.
Basculer le commutateur de commande manuelle
sur la position 100% pour que le servomoteur
reçoive un ordre d’ouverture (20mA).
Rotation en sens
‘Ouverture’
Cas N°1: Le servomoteur part en ouverture et
s’arrête avant le fin de course ouverture. Ajuster le
potentiomètre situé sur la carte ‘positionneur’ “ADJ
100%” (réglage du 100%) progressivement sens
horaire jusqu’à amener le servomoteur sur le fin
de course ouverture.
Tourner lentement ce potentiomètre en sens
antihoraire jusqu’à éteindre le voyant vert.
ADJ
100%
Le 100% est synchro-
nisé
Vérifier que le
signal de recopie est
conforme aux valeurs
attendues (4-20mA)
Cas N°2: Le servomoteur part en ouverture,
s’arrête sur le fin de course ouverture, et le
voyant vert est toujours allumé. Tourner le
potentiomètre situé sur la carte ‘positionneur’ “ADJ
100%” (réglage du 100%) progressivement sens
antihoraire pour éteindre le voyant vert.
Vérifier la répétabilité du réglage par plusieurs
manœuvres 0% > 100% puis replacer le sélecteur
sur AUTO
Le réglage est terminé.