La page est en cours de chargement...
La page est en cours de chargement...

3
GAM-K POSITIONER SETTING
CONFIGURATION POSITIONNEUR GAM-K
GAM-K POSITIONER EINSTELLUNG
100% setting potentiometer
Potentiomètre réglage 100%
Potentiometer für die 100%
Einstellung
Local control switch
Commutateur commande manuelle
Lokal- Kontroll-Schalter
Actuator running in open direction LED
Voyant manoeuvre d’ouverture
LED für die Laufanzeige in
Richtung offen
LED for actuator running
in closing direction
Voyant manoeuvre de fermeture
LED für die Laufanzeige in
Richtung schließen
Potentiometer for local control
Potentiomètre de commande locale
Potentiometer für lokale Steuerung
Dead-band setting potentiometer
Potentiomètre de réglage
de la bande-morte
Potentiometer für die
Totband-Einstellung
Configuration switches
Commutateurs de configuration
Konfigurationsschalter
Local control buttons
Boutons de commande locale
Lokale Steuerschalter
Terminal strip
Bornier de connexion
Klemmenleiste
Electronic board configuration
Carte de configuration
Konfiguration der elektronischen Steuerung
FPI HOUSING
BOITIER FPI
FPI GEHÄUSE
Furnished with screws,
nuts & diagram
Fourni avec vis,
rondelles et schéma
Ausgestattet mit
Schrauben, Muttern
& Diagramm
Switch off the power supply before removing the terminal strip cover.
Couper l’alimentation avant d’enlever le couvercle du bornier de connexion.
Bevor Sie den Klemmenleistendeckel entfernen, schalten Sie die Spannungsversorgung aus.
CI2701 INTEGRAL+ BOARD SETTING
CONFIGURATION
CARTE CI2701
INTEGRAL+
INTEGRAL-PLUS
PLATINEN
EINSTELLUNGEN
Configuration jumpers
Cavaliers de configuration
Jumper Einstellungen
Configuration switches
Commutateurs
de configuration
DIL-Schalter- Funktionen
Thermal sensor tripped LED
Voyant alarme
protection thermique
Anzeige-LED für
“Thermokontakt ausgelöst”
Torque switch tripped LED
Voyant limiteur
d’effort activé
Anzeige-LED für
“Drehmoment ausgelöst”
Secondary fuses
Fusibles secondaires
Zweitsicherungen
Secondary fuses
Fusibles secondaires
Zweitsicherungen
Actuator closing
LED indicator
Voyant fermeture
servomoteur
Anzeige-LED für “Antrieb
schließt”
Actuator opening
LED indicator
Voyant ouverture
servomoteur
Anzeige-LED für “Antrieb
öffnet”
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

27
Français
SCHEMAS Page 3
1
INTRODUCTION Page 28
2
REGLAGE RAPIDE Page 28
3
CONFIGURATION Page 28
4
ALIMENTATION Page 28
4.1
Alimentation servomoteur Page 28
4.2
Alimentation externe Page 29
5
FONCTIONNEMENT DU SERVOMOTEUR Page 29
5.1
Sens de rotation Page 29
5.2
Type de fermeture Page 29
5.3
Shunt du limiteur d’effort en début d’ouverture Page 30
5.4
Temps d’inversion Page 30
6
COMMANDE A DISTANCE Page 30
6.1
Commande par contacts Page 31
6.2
Commande par tension Page 31
6.3
Commande par un contact unique Page 31
6.4
Priorité ouverture ou fermeture Page 32
6.5
Commande d’urgence (ESD) Page 32
6.6
Interdiction de commande locale Page 33
7
COMMANDE LOCALE Page 34
7.1
Commande locale maintenue Page 34
7.2
Stop local Page 34
7.3
Arrêt général Page 34
7.4
Cadenassage sélecteur local/distance Page 34
8
SIGNALISATIONS Page 35
8.1
Signalisations clignotantes Page 35
8.2
Relais de signalisation N°1 Page 36
8.3
Relais de signalisation N°2 Page 36
8.4
Relais de signalisation N°3 Page 36
8.5
Relais de signalisation N°4 Page 37
8.6
Relais défaut Page 37
9
PROTECTION FUSIBLES Page 39
10
OPTION POSITIONNEUR Page 39
10.1
Configuration du signal d’entrée Page 39
10.1.1
Utilisation d’un signal 0-20mA Page 39
10.1.2
Utilisation d’un signal 0-10V Page 39
10.2
Configuration du sens de manoeuvre Page 39
10.3
Configuration de la fonction seuil Page 40
10.4
Réglage de la bande morte Page 40
10.5
Manoeuvre locale Page 40
10.6
Réglage du 0% Page 41
10.7
Réglage du 100% Page 41
10.8
Les commandes fractionnées Page 41
10.9
Utilisation d’un transmetteur 4-20MA Page 42
10.10
Commandes à distance AUTO / ON-OFF Page 42
11
OPTION SIGNALISATION LOCALE Page 42
12
OPTION CARTE DE TEMPORISATION Page 42
13
RESOLUTION PROBLEMES VERSION INTEGRAL+ Page 44
14
RESOLUTION PROBLEMES POSITIONNEUR Page 46
15
CONFIGURATION UTILISATEUR Page 50
SOMMAIRE

28
1 INTRODUCTION
Le panneau de configuration de la commande INTEGRAL+ permet d’adapter le servomoteur
aux besoins particuliers de chaques application. La configuration du comportement du servomoteur
et des informations transmises se fait à l’aide de commutateurs et de cavaliers. Le servomoteur
est livré soit en configuration standard, soit avec une configuration particulière si celle ci est indiquée
à la commande. (La configuration peut être modifiée sur site).
Les positions des commutateurs et cavaliers peuvent être reportées dans la table en page 37.
2 > REGLAGE RAPIDE
Si le contrôle INTEGRAL+/POSIGAM+ ne nécessite aucune configuration spécifique, vous pouvez vous
référer directement au document détachable situé au centre de ce document pour un réglage sur
vanne simple et rapide.
Cette description considère que le réglage initial est une fermeture sur contrôle de position. Pour la
version POSIGAM+, la description considère un signal de position (commande et recopie)de 4/20mA.
Pour les paramétrage spéciaux, merci de vous référer aux autres chapitres.
3 CONFIGURATION
La configuration se fait simplement en déplaçant des commutateurs et des cavaliers.
En configuration “standard”, la plus courante, tous les commutateurs et cavaliers sont sur la position A.
4 ALIMENTATION
4.1
ALIMENTATION SERVOMOTEUR
L’alimentation du servomoteur peut être triphasée, monophasée ou courant continu.
Cavalier 100 (situé sur la carte inférieure)
En triphasé, un contrôleur de phase corrige automatiquement le sens des phases. De plus
si une phase de l’alimentation manque, le servomoteur ne pourra pas démarrer. Le
cavalier 100 doit être sur la position T.
Figure 2
Configuration des commutateurs
Figure 3
Configuration des cavaliers

29
Français
En monophasé ou en courant continu, il est nécessaire d’inhiber la correction de phase en positionnant
le cavalier 100 sur la position M.
- Alimentation monophasée ou Courant Continu
4.2
ALIMENTATION EXTERNE
Une alimentation courant continu 23V-1,2VA est disponible pour alimenter un transmetteur de courant
ou une commande à distance par contacts. Cette alimentation est isolée galvaniquement des autres
circuits électriques.
5 FONCTIONNEMENT DU SERVOMOTEUR
5.1
SENS DE ROTATION
En standard, le servomoteur ferme en sens horaire.
Commutateur 7
Basculer le commutateur 7 sur la position B pour les vannes à fermeture sens anti-horaire. Ce com-
mutateur inverse
- Le sens de rotation du moteur
- Les fins de course
- Les limiteurs d’efforts
- Fermeture sens anti-horaire
5.2 TYPE DE FERMETURE
En standard, le servomoteur se ferme sur fin de course.
Commutateur 1
Basculer le commutateur 1 sur la position B pour fermer sur limiteur d’effort (uniquement pour
un servomoteur équipé de limiteur d’effort). Le fin de course doit être actionné vanne fermée.
- Fermeture sur limiteur d’effort
Le fin de course est utilisé pour la si-
gnalisation vanne fermée, et, d’autre part, permet de distinguer un arrêt sur limiteur d’effort en cours
de manoeuvre comme un défaut et un arrêt sur limiteur d’effort en position fermée comme normal.

30
5.3 SHUNT DU LIMITEUR D’EFFORT EN DÉBUT D’OUVERTURE
En standard, le limiteur d’effort ouverture est actif sur toute la course du servomoteur.
Commutateur 6
Basculer le commutateur 6 sur la position B pour shunter le limiteur d’effort en début d’ouverture par
le fin de course fermeture
- Shunter le limiteur d’effort en dé-
but d’ouverture par le fin de course
fermeture
A utiliser lorsque le servomoteur à limiteur d’effort maintenu mécaniquement (type SR) est réglé
en fermeture sur limiteur d’effort. Permet d’éviter un déclenchement du limiteur d’effort au moment
de la réouverture.
5.4 TEMPS D’INVERSION
En standard le temps d’inversion est de 50ms. Cavalier 25 en position 50ms.
Cavalier 25
Déplacer le cavalier 25 en position 200ms pour avoir un temps d’inversion de 200ms.
- Reverse delay of 200 msTemps d’inversion de 200 ms
Note : le réglage du temps d’inversion est une configuration usine. Il permet
de pouvoir utiliser de gros moteurs monophasés.
6 COMMANDE A DISTANCE
La commande à distance d’un servomoteur équipé de la version INTEGRAL+ peut être faite à partir
d’une alimentation externe, ou d’une alimentation intégrée.
L’entrée de la carte est totalement isolée par des optocoupleurs.
La commande impulsionnelle (avec automaintien) nécessite 4 fils de liaison sur le bornier client:
Commun, stop, ouverture et fermeture. Si le bouton poussoir arrêt n’est pas utilisé, ne pas raccorder
la liaison STOP, le contact ouverture (ou fermeture) doit être maintenu pour actionner le servomoteur.

31
Français
6.1 COMMANDE PAR CONTACTS
En commande par contact, il est nécessaire de faire un shunt aux bornes client 5-6.
6.2 COMMANDE PAR TENSION
La commande à distance peut s’effectuer indifféremment
en courant continu ou en courant alternatif.
Pour les tensions basses de 10 à 55V, utiliser le commun borne 5.
Pour les tensions hautes de 90 à 250V, utiliser le commun borne 4
6.3 COMMANDE PAR UN CONTACT UNIQUE
Il est possible de commander le servomoteur à l’aide d’un contact extérieur unique.
- Contact fermé : ouverture de la vanne
- Contact ouvert : fermeture de la vanne
Il est nécessaire de configurer le servomoteur avec priorité à l’ouverture (voir 5.4)
La commande inverse est possible :
- Contact fermé : fermeture de la vanne
- Contact ouvert : ouverture de la vanne
Il est nécessaire de configurer le servomoteur avec priorité à la fermeture (voir 5.4)
4
5
6
7
8
9
10
4
5
6
7
8
9
10
4
5
6
7
8
9
10
4
5
6
7
8
9
10
Attention : ne jamais raccorder
une source de tension supérieure
à 55V sur le commun borne 5.

32
6.4 PRIORITÉ À L’OUVERTURE OU À LA FERMETURE
En standard, il n’y a pas de priorité à l’ouverture ou à la fermeture. Les priorités servent :
- A inverser le sens de marche en cours de manoeuvre sans passer par une commande stop.
Il faut dans ce cas une prioirté à l’ouverture et à la fermeture.
- Donner la priorité à un sens de rotation : si le servomoteur reçoit 2 ordres ouverture
et fermeture simultanés et qu’une priorité ouverture a été choisie, alors le servomoteur
va en ouverture.
- A faire des commandes par contact unique
Commutateurs 9 et 10
Basculer le commutateur 9 sur la position B pour avoir une priorité à la fermeture.
Basculer le commutateur 10 sur la position B pour avoir une priorité à l’ouverture
- Priorité à la fermeture
- Priorité à l’ouverture
- Inversion du sens de manoeuvre
sans passer par une commande stop
La commande prioritaire arrête l’opé-
ration en cours et est aussitôt active.
6.5 COMMANDE D’URGENCE (ESD)
L’ESD (Emergency Shut Down) est une commande d’urgence à distance, prioritaire sur toute autre
commande. Suivant l’utilisation de la vanne, l’ordre d’urgence sera une ouverture ou une ferme-
ture. Pour augmenter la disponibilité du servomoteur dans les situations extrêmes, la commande
d’urgence peut aussi shunter la protection thermique du moteur.
Note : La commande d’urgence n’est pas disponible quand le sélecteur local/distance est sur “OFF”..
En standard, la commande ESD est établie par fermeture d’un contact.
Cavalier 27 en position

33
Français
Cavalier 27
Déplacer le cavalier 27 en position pour avoir une com-
mande d’ESD par ouverture d’un contact.
En standard, l’ordre ESD est un ordre de fermeture. Cavalier 28
en position CLOSE.
Cavalier 28
Déplacer le cavalier 28 en position OPEN pour avoir un ordre
d’ouverture.
En standard, la commande ESD ne shunte pas la protection
thermique du moteur
Commutateur 8
Basculer le commutateur 8 sur la position B pour shunter la protection thermique
du moteur lors de la commande ESD.
- Configuration de la commande d’urgence: Cavaliers 27 et 28
- Shunt de la protection thermique
du moteur lors de la commande
d’urgence
6.6 INTERDICTION DE COMMANDE LOCALE
L’interdiction de commande locale est une commande à distance. Cette commande condamne les
ordres ouverture, fermeture effectués en local, et autorise les ordres distances, même si le sélecteur
local/distance est sur local.
En configuration standard, le stop local et l’arrêt général restent possibles au niveau du servomoteur.
Pour interdire aussi le stop local et l’arrêt général, voir 6.3 (commutateur 4 sur position B)
Attention : Dans cette
configuration, si l’entrée ESD
n’est pas raccordée,
le servomoteur reçoit un ordre
de manoeuvre dès la mise
sous tension. Il est recom-
mandé en attendant la mise
en service d’établir un shunt
au bornier à la place de cette
commande à distance ESD.
Note : la commande interdiction de commande locale n’est pas disponible avec l’option positionneur.
Elle est remplacée (automatiquement) par la fonction “AUTO/ON-OFF CONTROL”.

34
7 COMMANDE LOCALE
Comme la commande à distance, une commande locale peut être utilisée. Un sélecteur local permet
de choisir la commande à distance ou locale. Le bouton de commande locale ouverture, fermeture
permet de manoeuvrer le servomoteur dans le sens désiré. Le stop local s’effectue par une rotation
momentanée du sélecteur local/distance.
7.1 COMMANDE LOCALE MAINTENUE
En standard, la commande locale est automaintenue. (Une impulsion suffit pour effectuer une commande
ouverture ou fermeture)
Commutateur 5
Basculer le commutateur 5 sur la
position B pour supprimer l’automain-
tien. (La commande ouverture ou
fermeture doit être maintenue pen-
dant la manoeuvre)
- Commande locale sans automaintien
7.2 STOP LOCAL
En standard, il est possible de faire un stop local du servomoteur, même si celui-ci est en commande
à distance.
7.3 ARRÊT GÉNÉRAL
En standard, il est possible de faire un arrêt général du servomoteur. Mettre le sélecteur local/dis-
tance sur la position OFF. Aucune commande électrique en local ou à distance n’est alors possible.
Si la commande à distance “interdiction de commande locale” est utilisée, la fonction arrêt général
reste prioritaire.
Commutateur 4
Basculer le commutateur 4 sur la
position B pour que l’arrêt local
soit impossible en interdiction de
commande locale.
- Arrêt local impossible si interdiction
de commande locale.
7.4 CADENASSAGE DU SÉLECTEUR LOCAL/DISTANCE
Le sélecteur local/distance peut être cadenassé en position arrêt général, local ou distance.

35
Français
8 SIGNALISATIONS
La signalisation à distance se fait à l’aide de 5 relais :
- Quatre relais simple contact pour les signalisations de fonctionnement. Les contacts
peuvent être normalement ouverts ou normalement fermés.
Nota : Hors tension les relais sont toujours à contact ouvert.
- Un relais inverseur pour la signalisations d’un défaut.
Nota : Le relais défaut est normalement sous tension, et retombe en cas de défaut.
Informations par relais (La configuration standard est représentée en gris)
8.1 SIGNALISATIONS CLIGNOTANTES
En standard, les informations :
- Servomoteur en cours de manoeuvre
- Servomoteur en cours d’ouverture
- Servomoteur en cours de fermeture
ne sont pas clignotantes
Commutateur 11
Basculer le commutateur 11 sur la position B pour faire clignoter les trois informations
Les signalisations :
- Servomoteur en cours de manoeuvre
- Servomoteur en cours d’ouverture
- Servomoteur en cours de fermeture
sont clignotantes
N° Relais Information à transmettre
Repère position
du cavalier
Bornier client
Relais 1
Fin de course ouverture
Limiteur d’effort ouverture
14 - LSO
14 - TSO
13 - 14
Relais 2
Fin de course fermeture
Limiteur d’effort fermeture
15 - LSC
15 - TSC
15 - 16
Relais 3
Fin de course ouverture
Limiteur d’effort ouverture
Sélecteur local/distance sur local
Sélecteur local/distance sur distance
Servomoteur en cours de manoeuvre
Servomoteur en cours d’ouverture
16 - LSO
16 - TSO
17 - LOCAL
17 - REMOTE
18 - RUNNING
18 - OPENING
17 - 18
Relais 4
Fin de course fermeture
Limiteur d’effort fermeture
Servomoteur reçoit commande d’urgence (ESD)
Servomoteur en cours de fermeture
Sélecteur local/distance sur local
Sélecteur local/distance sur distance
19 - LSC
19 - TSC
20 - ESD
20 - CLOSING
21 - LOCAL
21 - REMOTE
19 - 20

36
8.2 RELAIS DE SIGNALISATION N°1
En standard, le relais N°1 signale le fin de course ouverture. Cavalier 14 en position LSO (Limit Switch Open).
Cavalier 14
Déplacer le cavalier 14 en position TSO (Torque Switch Open) pour que le relais N°1 signale le limiteur
d’effort ouverture.
En standard, le relais N°1 est à contact normalement ouvert. Cavalier 22 en position
Cavalier 22
Déplacer le cavalier 22 en position pour que le relais N°1 soit à contact
normalement fermé.
- Configuration du relais 1 : cavaliers 14 et 22
8.3 RELAIS DE SIGNALISATION N°2
En standard, le relais N°2 signale la fin de course fermeture. Cavalier 15 en position LSC (Limit Switch
Close).
Cavalier 15
Déplacer le cavalier 15 en position TSC (Torque Switch Close) pour que le relais N°2 signale le limiteur
d’effort fermeture.
En standard, le relais N°2 est à contact normalement ouvert. Cavalier 23 en position
Cavalier 23
Déplacer le cavalier 23 en position pour que le relais N°2 soit à contact
normalement fermé.
- Configuration du relais 2 : cavaliers 15 et 23
8.4 RELAIS DE SIGNALISATION N°3
En standard, le relais N°3 signale la fin de course ouverture. Cavalier 16 enposition LSO (Limit Switch Open).
Supports de cavalier 16, 17 et 18
NOTE : un seul cavalier est affecté aux 3 supports numéro 16, 17 et 18.
- Déplacer le cavalier sur le support 16 / TSO (Torque Switch Open) pour que le relais N°3 signale
que le limiteur d’effort ouverture est activé.
- Déplacer le cavalier sur le support 17 / REMOTE pour que le relais N°3 signale que le sélecteur
local/distance est sur la position distance
- Déplacer le cavalier sur le support 17 / LOCAL pour que le relais N°3 signale que le sélecteur local/
distance est sur la position locale
- Déplacer le cavalier sur le support 18 / OPENING pour que le relais N°3 signale que le servo-
moteur est en cours d’ouverture
- Déplacer le cavalier sur le support 18 / RUNNING pour que le relais N°3 signale toute manoeuvre.
En standard, le relais N°3 est à contact normalement ouvert. Cavalier 24 en position

37
Français
Cavalier 24
Déplacer le cavalier 24 en position pour que le relais N°3 soit à contact
normalement fermé.
- Configuration du relais 3 : cavaliers 16, 17, 18 et 24
- 1 seul cavalier pour les 3 supports 16,17 et 18
8.5 RELAIS DE SIGNALISATION N°4
En standard, le relais N°4 signale le fin de course fermeture. Cavalier 19 en position LSC (Limit Switch Close).
Cavaliers 19, 20 et 21
NOTE : un seul cavalier est affecté aux 3 supports numéro 19, 20 et 21.
- Déplacer le cavalier sur le support 19 / TSC (Torque Switch Close) pour que le relais
N°4 signale que le limiteur d’effort fermeture est activé.
- Déplacer le cavalier sur le support 20 / CLOSING pour que le relais N°4 signale le servomoteur
en cours de fermeture.
- Déplacer le cavalier sur le support 20 / ESD (Emergency Shut Down) pour que le relais N°4
signale que le servomoteur reçoit une commande d’urgence (ESD).
- Déplacer le cavalier sur le support 21 / REMOTE pour que le relais N°4 signale le sélecteur
local/distance sur la position distance.
- Déplacer le cavalier sur le support 21 / LOCAL pour que le relais N°4 signale le sélecteur
local/distance sur la position locale.
En standard, le relais N°4 est à contact normalement ouvert.
Cavalier sur le support 26 position
Cavalier 26
Déplacer le cavalier 26 en position pour que le relais N°4 soit à contact
normalement fermé.
- Configuration du relais 4 : support cavalier N°19, 20, 21 et N°26
- 1 seul cavalier pour les supports 19, 20 et 21
8.6 RELAIS DÉFAUT
Le relais défaut signale une indisponibilité du servomoteur ou un fonctionnement anormal. Le relais
défaut est normalement sous tension, et retombe en cas de défaut comme par exemple :
- Perte d’alimentation puissance, contrôle, fusible
- Perte d’une phase (en alimentation triphasé)
- Déclenchement de la protection thermique moteur
- Perte de signal 4-20mA (avec option positionneur)*
- Sélecteur local/distance en position local ou arrêt**
* Sur une version sans positionneur, le commutateur N°2 n’a pas d’effet.
** Dans le cas d’une interdiction de commande locale, le commutateur sur position locale n’est pas
signalé comme un défaut, car le servomoteur est toujours disponible pour les commandes à distance.

38
Commutateur 2
Basculer le commutateur 2 sur la
position B pour que la perte du signal
4-20mA ne soit pas un défaut. (Option
positionneur seulement).
- La perte du signal 4-20mA n’est pas
un défaut. (Option positionneur seu-
lement).
Commutateur 3
Basculer le commutateur 3 sur la posi-
tion B pour que le commutateur local/
distance sur local ou arrêt ne soit pas
un défaut.
- le commutateur local/distance sur
local ou arrêt n’est pas un défaut.
Commutateur 12
Basculer le commutateur 12 sur la
position B pour qu’un déclenchement
du limiteur d’effort fermeture soit un
défaut.
- Un déclenchement du limiteur
d’effort fermeture est un défaut
Commutateur 13
Basculer le commutateur 13 sur la
position B pour que un déclenchement
du limiteur d’effort ouverture soit un
défaut.
- Un déclenchement du limiteur
d’effort ouverture est un défaut.
Remarque : Le système de surveillance est capable de détecter si la vanne se ferme sur limiteur
d’effort et dans ce cas n’indique pas de défaut.
La page est en cours de chargement...

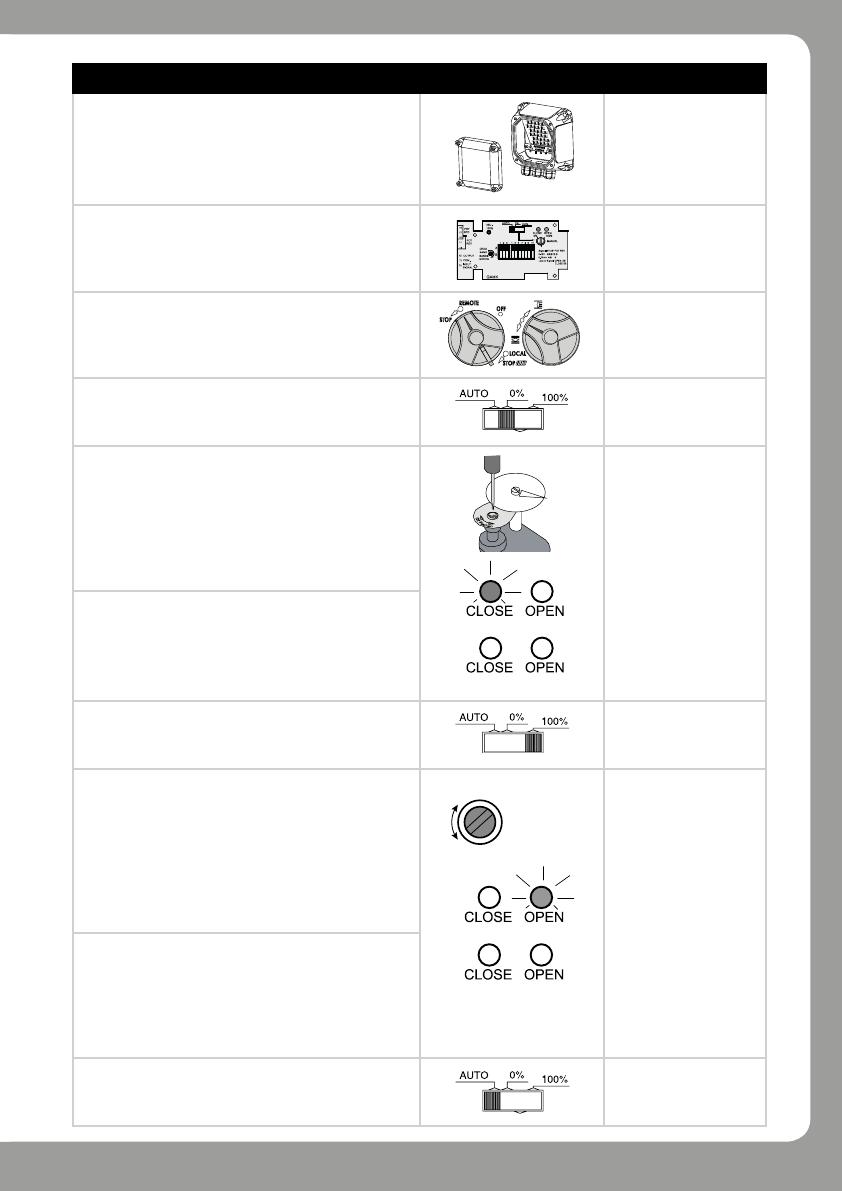
PRISE EN MAIN RAPIDE INTEGRAL+ / POSIGAM+
Le servomoteur est raccordé électriquement sur la partie puissance 0/1/Terre en monophasé,
1/2/3/Terre en triphasé.
Il est raccordé mécaniquement à la vanne (ou ventelle) à actionner.
DESCRIPTION AFFICHAGE COMMENTAIRES
Réglage des fins de course POSIGAM+ et réglage complet INTEGRAL+
Mettre le sélecteur sur position LOCAL
Si actionneur ¼ tour (ou actionneur multitours
monté sur réducteur ¼ de tour). Desserrer les 2 vis
de butée:
- A l’aide d’une clef plate : desserrer le contre-écrou
- A l’aide d’une clef hexagonale : desserrer la butée
de 2 tours
Clef plate
Clef hexagonale
A l’aide le commande locale (ou du volant),
atteindre la position ‘fermé’ de la vanne
Ajuster la came si nécessaire (repère blanc) pour
augmenter ou diminuer la course.
Pour un meilleur accès, la carte ‘potentiomètre’
fixée sur le bloc de cames peut être
temporairement démontée.
Faire des aller-retour à
l’aide de la commande
locale entre deux
ajustements
A l’aide le commande locale (ou du volant),
atteindre la position ‘Ouverture 100%’ de la vanne
Ajuster came si nécessaire (repère noir) pour
augmenter ou diminuer la course.
Faire des aller-retour à
l’aide de la commande
locale entre deux
ajustements
Sur actionneur ¼ de tour :
- Resserrer la vis de butée ‘ouverture’ jusqu’à
atteindre le secteur et puis dévisser de 1,5 tour
- Resserrer le contre-écrou en maintenant la vis
de butée
Fermer la vanne et effectuer l’opération similaire
sur la butée de fermeture : Atteindre le secteur et
desserrer de 1,5 tour, resserrer le contre-écrou
Pour effectuer les autres paramétrages spécifiques, merci de vous reporter à la notice détaillée NR1088
Français
INTEGRAL+ / POSIGAM +
Prise en main rapide
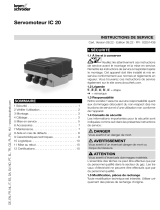
Réglage POSIGAM+
Remonter la carte potentiomètre sur l’axe du bloc
de cames si elle a été démontée lors du réglage
des cames de fin de course.
Brancher un milliampèremètre sur les bornes 31
et 32.
31(-) et 32(+)
Ouvrir le boitier pour voir apparaitre la carte du
positionneur (GAM-K)
Cette carte est située
à 90° de la commande
locale.
Mettre le sélecteur rouge sur position REMOTE
La commande locale
devient impossible
Basculer le commutateur de commande manuelle
sur la position 0% pour que le servomoteur reçoive
un ordre de fermeture (équivalent à 4mA).
Rotation en sens
‘Fermeture’
Cas N°1: Le servomoteur part en fermeture
et s’arrête sans actionner le contact de fin de
course fermeture. Tourner le potentiomètre du
servomoteur progressivement pour amener le
servomoteur sur le contact de fin de course,
voyant allumé. Tourner lentement le potentiomètre
en sens inverse jusqu’à éteindre le voyant rouge.
Le 0% est synchronisé.
Vérifier le signal de
recopie mesuré entre
les bornes 31 et 32
(4mA variable selon
réglage)
Cas N°2: Le servomoteur part en fermeture,
s’arrête sur le fin de course fermeture et le voyant
de fermeture est toujours allumé. Tourner le
potentiomètre du servomoteur progressivement
pour éteindre le voyant de fermeture.
Basculer le commutateur de commande manuelle
sur la position 100% pour que le servomoteur
reçoive un ordre d’ouverture (20mA).
Rotation en sens
‘Ouverture’
Cas N°1: Le servomoteur part en ouverture et
s’arrête avant le fin de course ouverture. Ajuster le
potentiomètre situé sur la carte ‘positionneur’ “ADJ
100%” (réglage du 100%) progressivement sens
horaire jusqu’à amener le servomoteur sur le fin
de course ouverture.
Tourner lentement ce potentiomètre en sens
antihoraire jusqu’à éteindre le voyant vert.
ADJ
100%
Le 100% est synchro-
nisé
Vérifier que le
signal de recopie est
conforme aux valeurs
attendues (4-20mA)
Cas N°2: Le servomoteur part en ouverture,
s’arrête sur le fin de course ouverture, et le
voyant vert est toujours allumé. Tourner le
potentiomètre situé sur la carte ‘positionneur’ “ADJ
100%” (réglage du 100%) progressivement sens
antihoraire pour éteindre le voyant vert.
Vérifier la répétabilité du réglage par plusieurs
manœuvres 0% > 100% puis replacer le sélecteur
sur AUTO
Le réglage est terminé.
La page est en cours de chargement...

39
Français
9 PROTECTION FUSIBLES
Accessibilité :
- Mettre le servomoteur hors tension.
- Déposer le couvercle avec les boutons de contrôle. Faire attention aux câbles à l’intérieur
du couvercle.
- Dévisser les bouchons des supports de fusible et changer les fusibles si nécessaire..
Caractéristiques des fusibles :
FU1 : fusible primaire transformateur 6,3 x 32mm - 0,5A - 500V
FU2 : fusible secondaire transformateur 5 x 20mm - 0,5A
FU3 : fusible secondaire transformateur 5 x 20mm - 0,05A
10 OPTION POSITIONNEUR
Un positionneur permet d’atteindre une position proportionnelle à un signal de commande. Le panneau
de configuration permet:
- De faire des commandes de positionnement local
- D’adapter le servomoteur au signal d’entrée
- De configurer la réaction du servomoteur en cas de perte de signal d’entrée
10.1 CONFIGURATION DU SIGNAL D’ENTRÉE
Le standard est un signal d’entrée de 4-20mA
10.1.1 Utilisation d’un signal 0-20mA
Commutateurs 4 et 8
Basculer les commutateurs 4 et 8 sur la position B pour un signal d’entrée 0-20mA. La recopie
de position est aussi en 0-20mA.
10.1.2 Utilisation d’un signal 0-10V
Commutateur 4, 8, 9 et 10
Basculer les commutateurs 4, 8, 9 et 10 sur la position B pour utiliser un signal 0-10V. La recopie
de position est en 0-20mA.
10.2 CONFIGURATION DU SENS DE MANOEUVRE
Le standard est 4 mA vanne fermée et 20mA vanne ouverte.
Commutateur 3
Connexion du potentiomètre
Basculer le commutateur 3 sur la position B, et déplacer la connexion du potentiomètre du servomoteur
de la position “POT STD” à “POT REV” pour avoir 4mA vanne ouverte et 20mA vanne fermée.

40
10.3 CONFIGURATION DE LA FONCTION SEUIL
Avec un signal d’entrée 4-20mA, il est possible de configurer une position de repli en cas de coupure
de signal de commande.
En standard, la fonction est active, et le servomoteur reste en position en cas de perte du signal.
Commutateurs 5, 6 et 8
Basculer le commutateur 5 sur la position B pour que le servomoteur s’ouvre en cas de perte du signal
Basculer le commutateur 6 sur la position B pour que le servomoteur se ferme en cas de perte de signal
Basculer le commutateur 8 sur la position B pour désactiver la fonction seuil.
10.4 RÉGLAGE DE LA BANDE MORTE
Ce réglage est fait en usine, mais il est possible d’ajuster par action sur le potentiomètre
“BANDE MORTE”. Pour réduire la bande morte tourner en sens antihoraire.
10.5 MANOEUVRE LOCALE
Il est possible de simuler un signal de consigne 4-20mA en local pour vérifier le fonctionnement
du servomoteur.
- AUT : Commande par signal externe
- 0% : Signal interne 0% (4mA en standard)
- MAN : Signal interne réglable de 0 à 100%
- 100 % : Signal interne 100% (20mA en standard)
Basculer le commutateur de commande locale sur la 0%,MAN ou 100%. Tourner le potentiomètre
“MAN” pour simuler un signal 4-20mA.
Configuration du sens de manoeuvre
Définition du
signal d’entrée
Ouverture
4mA 20mA
0mA 20mA
0v 10V
Fermeture
4mA 20mA
0mA 20mA
0v 10V
Action
de la vanne
Fermeture
sens horaire
Fermeture
sens anti-horaire
Fermeture
sens horaire
Fermeture
sens anti-horaire
Configuration Standard
Carte CI2701 :
commutateur 7 sur B
Potentiomètre
inversé
GAMK board:
switch 3 on B
Reverse potentio-
meter
Carte CI2701 :
commutateur 7 sur B
Carte GAMK :
commutateur 3 sur B
Attention : dans le cas d’un signal d’entré 0-20mA ou 0-10V, La fonction seuil
ne peut pas être utilisée et doit être désactivée. Basculer le commutateur 8 sur la position B.
Attention : Une réduction trop importante de la bande morte amènera un “pompage” du servomoteur.

41
Français
10.6 RÉGLAGE DU 0%
Basculer le commutateur de commande manuelle sur la position 0% pour que le servomoteur
reçoive un ordre de fermeture (4mA).
Cas N°1: le servomoteur part en fermeture et s’arrête avant le fin de course fermeture.
Tourner le potentiomètre du servomoteur progressivement pour amener le servomoteur
sur le fin de course fermeture, voyant allumé. Tourner lentement le potentiomètre en sens
inverse jusqu’à étendre le voyant rouge.
Cas N°2: le servomoteur part en fermeture, s’arrête sur le fin de course fermeture, et le voyant
de fermeture est toujours allumé.
Tourner le potentiomètre du servomoteur progressivement pour éteindre le voyant
de fermeture.
10.7 RÉGLAGE DU 100%
Basculer le commutateur de commande manuelle sur la position 100% pour que le servomoteur
reçoive un ordre d’ouverture (20mA).
Cas N°1: le servomoteur part en ouverture et s’arrête avant le fin de course ouverture.
Actionner le potentiomètre “ADJ 100%” (réglage du 100%) progressivement sens horaire
jusqu’à amener le servomoteur sur le fin de course ouverture. Tourner lentement ce poten-
tiomètre en sens inverse jusqu’à éteindre le voyant vert.
Cas N°2: le servomoteur part en ouverture, s’arrête sur le fin de course ouverture, et le voyant
vert est toujours allumé.
Tourner le potentiomètre “ADJ 100%” (réglage du 100%) progressivement sens antihoraire
pour éteindre le voyant vert.
10.8 LES COMMANDES FRACTIONNÉES
La carte positionneur peut se configurer pour des commandes fractionnées.
On appelle commandes fractionnées les signaux d’entrée 4-12mA et 12-20mA. Le signal de l’utili-
sateur est normal: 4-20mA. Un premier servomoteur est prévu pour recevoir un signal de 4 à 12mA
et un deuxième est prévu pour recevoir un signal de 12 à 20mA. Chaque servomoteur reçoit le signal
4-20mA. Le premier s’ouvre complètement de 0 à 50% du signal et le second de 50 à 100% du signal.
Commutateurs 1 et 2
Basculer le commutateur 1 sur la position B pour que le servomoteur reçoive une commande
fractionnée 12-20mA.
Basculer le commutateur 2 sur la position B pour que le servomoteur reçoive une commande
fractionnée 4-12mA.

42
10.9 UTILISATION D’UN TRANSMETTEUR 4-20MA
En standard on utilise le potentiomètre du servomoteur pour connaître la position de la vanne.
Commutateur 7
Basculer le commutateur 7 sur la position B pour utiliser un transmetteur 4-20mA à la place
du potentiomètre du servomoteur.
10.10 COMMANDES À DISTANCE AUTO / ON-OFF CONTROL
Avec un positionneur, il est possible de faire des commandes à distance par un signal 4-20mA ou
par des commandes ouverture/fermeture/stop. L’entrée sur le bornier client AUTO/ON-OFF CONTROL
permet de basculer d’un type de commande à l’autre.
Voir le chapitre 5 “commande à distance” pour la configuration des commandes ouverture fermeture.
Nota : les commandes à distances “AUTO/ON-OFF CONTROL” et “Interdiction de commande locale”
utilisent la même entrée sur le bornier client. L’installation du positionneur affecte automatiquement
cette entrée à la fonction AUTO/ON-OFF CONTROL. La fonction interdiction de commande locale
n’est pas utilisable avec le positionneur.
11 OPTION SIGNALISATION LOCALE
En option une signalisation lumineuse visible à travers un hublot au niveau de la commande locale
indique l’état du servomoteur.
- Voyant vanne ouverte
- Voyant vanne fermée
- Voyant servomoteur sous tension
12 OPTION CARTE DE TEMPORISATION
Un module additionnelle temporisateur permet de réduire la vitesse de fonctionnement du servomoteur,
par exemple pour protéger une canalisation contre les coups de bélier.
Ce module est raccordé sur l’entrée P202TEMPO de la commande INTEGRALE+ du servomoteur. Quand
l’ordre est envoyé, une temporisation effectue une commande cadencée marche/arrêt du contacteur.
Le temps de marche ON et le temps d’arrêt OFF sont réglables :
T.ON : 0,5 à 10 sec
T.OFF : 3 sec à 2 mn
Le temps de manoeuvre de la pleine course peut ainsi atteindre des temps très longs et de plus être
ajustable sur site.
Les réglages dans le sens Ouverture et dans le sens Fermeture sont indépendants.
En utilisant un fin de course auxiliaire, il est possible de court-circuiter la temporisation tant
que le microcontact est actionné. Ce dispositif permet de faire fonctionner le servomoteur à pleine
vitesse sur une partie de la course. La longueur de la came de fin de course représente environ 10%
de la course totale.

43
Français
CYCLE DE FONCTIONNEMENT
1/ Contact auxiliaire ouverture.
2/ Contact auxiliaire fermeture.
3/ Ouverture lente.
4/ Ouverture rapide.
5/ Fermeture rapide.
6/ Fermeture lente.
7/ Réglage du temps d’arrêt sens ouverture.
8/ Réglage du temps de marche sens ouverture.
9/ Réglage du temps de marche sens fermeture.
10/ Réglage du temps d’arrêt sens fermeture.
11/ Connexion des contacts auxiliaires éventuels
12/ Connexion de la carte INTEGRAL+.
Open
Close
Time
1 4
5
3
2
6
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
















































































Bernard Posigam+ Installation & Operation Manual
- Taper
- Installation & Operation Manual
- Ce manuel convient également à
dans d''autres langues
- English: Bernard Posigam+
- Deutsch: Bernard Posigam+
Documents connexes
-
Bernard Fielbus Solution PROFIBUS DP FOR INTEGRAL Instructions For Use Manual
-
-
-
-
Autres documents
-
Bernard Controls INTELLI+ Installation & Operation Manual
-
-
-
Bernard Controls AQ25 Startup Manual
-
-
-
-
-
sauter MV 505473 Assembly Instructions
-
 Kromschroder IC 20 Mode d'emploi
Kromschroder IC 20 Mode d'emploi
