
Robot industriel : Robots SCARA
Manuel de la série GX
Version traduite
©Seiko Epson Corporation 2021-2023
Rev.7
FRM238R5935F

Table des matières
1. Introduction 11
1.1 Introduction 12
1.2 Marques commerciales 12
1.3 Conditions d’utilisation 12
1.4 Fabricant 12
1.5 Informations de contact 12
1.6 Élimination 12
1.7 Avant l’utilisation 12
1.8 Types de manuels pour ce produit 13
2. Manipulateur GX4 15
2.1 Sécurité 16
2.1.1 Conventions utilisées dans ce manuel 16
2.1.2 Sécurité de conception et d’installation 17
2.1.2.1 Résistance de l’arbre cannelé à billes 17
2.1.3 Sécurité de fonctionnement 18
2.1.4 Arrêt d’urgence 19
2.1.5 Sécurité (SG) 20
2.1.6 Méthode de mouvement du bras en état d’arrêt d’urgence 21
2.1.7 Réglage ACCELS pour le mouvement CP 22
2.1.8 Étiquettes d’avertissement 24
2.1.8.1 Étiquettes d’avertissement 24
2.1.8.2 Étiquettes d’informations 24
2.1.8.3 Emplacements des étiquettes 25
2.1.9 Interventions en cas d’urgence ou de dysfonctionnement 27
2.1.9.1 En cas de collision avec le manipulateur 27
2.1.9.2 Coincement avec le manipulateur 27
2.2 Spécifications 29
2.2.1 Nom de modèle GX4-A 29
2.2.2 Nom de modèle GX4-B 34
2.2.3 Noms des pièces et leurs dimensions 38
2.2.3.1 Spécifications de montage sur table 38
2.2.3.1.1 Sens de montage des câbles : Standard 38
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
2

2.2.3.1.2 Sens de montage des câbles : Acheminement des câbles par le bas 45
2.2.3.2 Spécifications de montage multiple 51
2.2.4 Tableau des spécifications 58
2.2.5 Réglage du modèle 58
2.3 Environnement et installation 59
2.3.1 Environnement 59
2.3.2 Socle 60
2.3.3 Dimensions de montage du manipulateur 62
2.3.4 Du déballage à l’installation 65
2.3.4.1 Consignes de sécurité pour le déroulement du déballage à l’installation 65
2.3.4.2 Spécifications de montage sur table 66
2.3.4.3 Spécifications de montage multiple 68
2.3.4.4 Spécifications salle blanche et ESD 70
2.3.5 Connexion des câbles 71
2.3.6 Câbles utilisateur et tubes pneumatiques 74
2.3.6.1 Fils électriques 74
2.3.6.2 Tubes pneumatiques 74
2.3.7 Déplacement et stockage 78
2.3.7.1 Consignes de sécurité pour le déplacement et le stockage 78
2.3.7.2 Spécifications de montage sur table 79
2.3.7.3 Spécifications de montage multiple 82
2.4 Mise en place de la main 85
2.4.1 Installation de la main 85
2.4.2 Fixation des caméras et des vannes 86
2.4.3 Réglages du poids et de l’inertie 88
2.4.3.1 Réglage du poids 88
2.4.3.1.1 Poids de la charge fixée à l’arbre 89
2.4.3.1.2 Poids de la charge fixée au bras 89
2.4.3.1.3 Correction automatique de la vitesse au réglage du poids 90
2.4.3.1.4 Correction automatique de l’accélération/décélération au réglage du poids 91
2.4.3.2 Réglage de l’inertie 93
2.4.3.2.1 Moment d’inertie et réglage de l’inertie 93
2.4.3.2.2 Moment d’inertie de la charge fixée à l’arbre 93
2.4.3.2.3 Correction automatique de l’accélération/décélération de l’articulation #4 au réglage de l’inertie
(moment d’inertie)
94
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
3

2.4.3.2.4 Réglage de l’excentricité et de l’inertie 94
2.4.3.2.5 Excentricité de la charge fixée à l’arbre 95
2.4.3.2.6 Correction automatique de l’accélération/décélération au réglage de l’inertie (excentricité)
95
2.4.3.2.7 Calcul du moment d’inertie 96
2.4.4 Consignes de sécurité pour l’accélération automatique de l’articulation #3 97
2.4.4.1 Correction automatique de l’accélération/décélération en fonction de la position de l’arbre 97
2.5 Enveloppe de travail 99
2.5.1 Réglage de l’enveloppe de travail par plage d’impulsions 100
2.5.1.1 Plage d’impulsions maximale de l’articulation #1 100
2.5.1.2 Plage d’impulsions maximale de l’articulation #2 102
2.5.1.3 Plage d’impulsions maximale de l’articulation #3 104
2.5.1.3.1 Plage d’impulsions maximale de l’articulation #4 104
2.5.2 Réglage de l’enveloppe de travail par butées mécaniques 105
2.5.2.1 Réglage des butées mécaniques des articulations #1 et #2 106
2.5.2.2 Réglage de la butée mécanique de l’articulation #3 111
2.5.3 Réglage de l’étendue rectangulaire dans le système de coordonnées XY du manipulateur 113
2.5.4 Enveloppe de travail standard 113
3. Manipulateur GX8 119
3.1 Sécurité 120
3.1.1 Conventions utilisées dans ce manuel 120
3.1.2 Sécurité de conception et d’installation 121
3.1.2.1 Résistance de l’arbre cannelé à billes 121
3.1.3 Sécurité de fonctionnement 122
3.1.4 Arrêt d’urgence 123
3.1.5 Sécurité (SG) 124
3.1.6 Méthode de mouvement du bras en état d’arrêt d’urgence 125
3.1.7 Réglage ACCELS pour le mouvement CP 126
3.1.8 Étiquettes d’avertissement 127
3.1.8.1 Étiquettes d’avertissement 127
3.1.8.2 Étiquettes d’informations 128
3.1.8.3 Emplacements des étiquettes 128
3.1.9 Interventions en cas d’urgence ou de dysfonctionnement 130
3.1.9.1 En cas de collision avec le manipulateur 130
3.1.9.2 Coincement avec le manipulateur 130
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
4

3.2 Spécifications 133
3.2.1 Nom de modèle GX8-A 133
3.2.2 Nom de modèle GX8-B 141
3.2.3 Noms des pièces et leurs dimensions 149
3.2.3.1 Spécifications de montage sur table 149
3.2.3.1.1 Sens de montage des câbles : Standard 149
3.2.3.1.2 Sens de montage des câbles : Acheminement des câbles par le bas 158
3.2.3.2 Spécifications de montage mural 167
3.2.3.3 Spécifications de montage au plafond 176
3.2.4 Tableau des spécifications 185
3.2.5 Réglage du modèle 185
3.3 Environnement et installation 185
3.3.1 Environnement 185
3.3.2 Socle 187
3.3.3 Dimensions de montage du manipulateur 190
3.3.4 Du déballage à l’installation 192
3.3.4.1 Consignes de sécurité pour le déroulement du déballage à l’installation 192
3.3.4.2 Spécifications de montage sur table 195
3.3.4.3 Spécifications de montage mural 197
3.3.4.4 Spécifications de montage au plafond 199
3.3.4.5 Salle blanche et modèle ESD 201
3.3.4.6 Modèle protégé 201
3.3.5 Connexion des câbles 202
3.3.6 Câbles utilisateur et tubes pneumatiques 205
3.3.6.1 Fils électriques 205
3.3.6.2 Tubes pneumatiques 206
3.3.7 Déplacement et stockage 211
3.3.7.1 Consignes de sécurité pour le déplacement et le stockage 211
3.3.7.2 Spécifications de montage sur table 211
3.3.7.3 Spécifications de montage mural 214
3.3.7.4 Spécifications de montage au plafond 218
3.4 Mise en place de la main 221
3.4.1 Installation de la main 221
3.4.2 Fixation des caméras et des vannes 222
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
5

3.4.3 Réglages du poids et de l’inertie 225
3.4.3.1 Réglage du poids 225
3.4.3.1.1 Poids de la charge fixée à l’arbre 226
3.4.3.1.2 Poids de la charge fixée au bras 226
3.4.3.1.3 Correction automatique de la vitesse au réglage du poids 227
3.4.3.1.4 Correction automatique de l’accélération/décélération au réglage du poids 229
3.4.3.2 Réglage de l’inertie 231
3.4.3.2.1 Moment d’inertie et réglage de l’inertie 231
3.4.3.2.2 Moment d’inertie de la charge fixée à l’arbre 232
3.4.3.2.3 Correction automatique de l’accélération/décélération de l’articulation #4 au réglage de l’inertie
(moment d’inertie)
232
3.4.3.2.4 Réglage de l’excentricité et de l’inertie 232
3.4.3.2.5 Excentricité de la charge fixée à l’arbre 233
3.4.3.2.6 Correction automatique de l’accélération/décélération au réglage de l’inertie (excentricité)
233
3.4.3.2.7 Calcul du moment d’inertie 234
3.4.4 Consignes de sécurité pour l’accélération automatique de l’articulation #3 235
3.4.4.1 Correction automatique de l’accélération/décélération en fonction de la position de l’arbre 235
3.5 Enveloppe de travail 238
3.5.1 Réglage de l’enveloppe de travail par plage d’impulsions 238
3.5.1.1 Plage d’impulsions maximale de l’articulation #1 239
3.5.1.2 Plage d’impulsions maximale de l’articulation #2 240
3.5.1.3 Plage d’impulsions maximale de l’articulation #3 242
3.5.1.4 Plage d’impulsions maximale de l’articulation #4 243
3.5.2 Réglage de l’enveloppe de travail par butées mécaniques 244
3.5.2.1 Réglage des butées mécaniques des articulations #1 et #2 245
3.5.2.2 Réglage de la butée mécanique de l’articulation #3 251
3.5.3 Réglage de l’étendue rectangulaire dans le système de coordonnées XY du manipulateur 254
3.5.4 Enveloppe de travail standard 254
4. Manipulateurs GX10 GX20 262
4.1 Sécurité 263
4.1.1 Conventions utilisées dans ce manuel 263
4.1.2 Sécurité de conception et d’installation 264
4.1.2.1 Résistance de l’arbre cannelé à billes 264
4.1.3 Sécurité de fonctionnement 265
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
6

4.1.4 Arrêt d’urgence 266
4.1.5 Sécurité (SG) 267
4.1.6 Méthode de mouvement du bras en état d’arrêt d’urgence 268
4.1.7 Réglage ACCELS pour le mouvement CP 269
4.1.8 Étiquettes d’avertissement 270
4.1.8.1 Étiquettes d’avertissement 270
4.1.8.2 Étiquettes d’informations 271
4.1.8.3 Emplacements des étiquettes 271
4.1.9 Interventions en cas d’urgence ou de dysfonctionnement 272
4.1.9.1 En cas de collision avec le manipulateur 272
4.1.9.2 Coincement avec le manipulateur 272
4.2 Spécifications 274
4.2.1 Nom du modèle GX10-B/GX20-B 274
4.2.2 Noms des pièces et leurs dimensions 279
4.2.2.1 Spécifications de montage sur table 279
4.2.2.2 Spécifications de montage mural 286
4.2.2.3 Spécifications de montage au plafond 293
4.2.3 Tableau des spécifications 300
4.2.4 Réglage du modèle 300
4.3 Environnement et installation 300
4.3.1 Environnement 300
4.3.2 Socle 302
4.3.3 Dimensions de montage du manipulateur 304
4.3.4 Du déballage à l’installation 306
4.3.4.1 Consignes de sécurité pour le déroulement du déballage à l’installation 306
4.3.4.2 Spécifications de montage sur table 309
4.3.4.3 Spécifications de montage mural 311
4.3.4.4 Spécifications de montage au plafond 312
4.3.4.5 Salle blanche et modèle ESD 314
4.3.4.6 Modèle protégé 314
4.3.5 Connexion des câbles 315
4.3.6 Câbles utilisateur et tubes pneumatiques 317
4.3.6.1 Fils électriques 317
4.3.6.2 Tubes pneumatiques 318
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
7

4.3.7 Déplacement et stockage 321
4.3.7.1 Consignes de sécurité pour le déplacement et le stockage 321
4.3.7.2 Spécifications de montage sur table 322
4.3.7.3 Spécifications de montage mural 325
4.3.7.4 Spécifications de montage au plafond 328
4.4 Mise en place de la main 331
4.4.1 Installation de la main 331
4.4.2 Fixation des caméras et des vannes 333
4.4.3 Réglages du poids et de l’inertie 335
4.4.3.1 Réglage du poids 335
4.4.3.1.1 Poids de la charge fixée à l’arbre 335
4.4.3.1.2 Poids de la charge fixée au bras 335
4.4.3.1.3 Correction automatique de la vitesse au réglage du poids 337
4.4.3.1.4 Correction automatique de l’accélération/décélération au réglage du poids 337
4.4.3.2 Réglage de l’inertie 338
4.4.3.2.1 Moment d’inertie et réglage de l’inertie 338
4.4.3.2.2 Moment d’inertie de la charge fixée à l’arbre 338
4.4.3.2.3 Correction automatique de l’accélération/décélération de l’articulation #4 au réglage de l’inertie
(moment d’inertie)
339
4.4.3.2.4 Réglage de l’excentricité et de l’inertie 339
4.4.3.2.5 Excentricité de la charge fixée à l’arbre 340
4.4.3.2.6 Correction automatique de l’accélération/décélération au réglage de l’inertie (excentricité)
340
4.4.3.2.7 Calcul du moment d’inertie 340
4.4.4 Consignes de sécurité pour l’accélération automatique de l’articulation #3 342
4.4.4.1 Correction automatique de l’accélération/décélération en fonction de la position de l’arbre 342
4.5 Enveloppe de travail 343
4.5.1 Réglage de l’enveloppe de travail par plage d’impulsions 343
4.5.1.1 Plage d’impulsions maximale de l’articulation #1 344
4.5.1.2 Plage d’impulsions maximale de l’articulation #2 344
4.5.1.3 Plage d’impulsions maximale de l’articulation #3 346
4.5.1.4 Plage d’impulsions maximale de l’articulation #4 347
4.5.2 Réglage de l’enveloppe de travail par butées mécaniques 348
4.5.2.1 Réglage des butées mécaniques des articulations #1 et #2 349
4.5.2.2 Réglage de la butée mécanique de l’articulation #3 354
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
8

4.5.3 Réglage de l’étendue rectangulaire dans le système de coordonnées XY du manipulateur 360
4.5.4 Enveloppe de travail standard 360
5. Inspection périodique 367
5.1 Inspection périodique du manipulateur GX4 368
5.1.1 Inspection 368
5.1.1.1 Calendrier d’inspection 368
5.1.1.2 Détails de l’inspection 369
5.1.2 Révision (remplacement de pièces) 370
5.1.3 Application de graisse 370
5.1.4 Serrage des boulons à tête cylindrique à six pans creux 375
5.2 Inspection périodique du manipulateur GX8 376
5.2.1 Inspection 376
5.2.1.1 Calendrier d’inspection 376
5.2.1.2 Détails de l’inspection 377
5.2.2 Révision (remplacement de pièces) 378
5.2.3 Application de graisse 378
5.2.4 Serrage des boulons à tête cylindrique à six pans creux 383
5.3 Inspection périodique du manipulateur GX10/GX20 384
5.3.1 Inspection 384
5.3.1.1 Calendrier d’inspection 384
5.3.1.2 Détails de l’inspection 385
5.3.2 Révision (remplacement de pièces) 386
5.3.3 Application de graisse 386
5.3.4 Serrage des boulons à tête cylindrique à six pans creux 391
6. Annexe 392
6.1 Annexe A : Tableau des spécifications 393
6.1.1 GX4 393
6.1.2 GX8 399
6.1.3 GX10/20 405
6.2 Annexe B : Temps d’arrêt et distance d’arrêt lors d’un arrêt d’urgence 410
6.2.1 Temps d’arrêt et distance d’arrêt de GX4 lors d’un arrêt d’urgence 411
6.2.2 Temps d’arrêt et distance d’arrêt de GX8 lors d’un arrêt d’urgence 417
6.2.3 Temps d’arrêt et distance d’arrêt de GX10 lors d’un arrêt d’urgence 423
6.2.4 Temps d’arrêt et distance d’arrêt de GX20 lors d’un arrêt d’urgence 425
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
9

6.3 Annexe C : Temps d'arrêt et distance d'arrêt lorsque la sécurité est ouverte 427
6.3.1 Temps d'arrêt et distance d'arrêt de GX4 lorsque la sécurité est ouverte 427
6.3.2 Temps d'arrêt et distance d'arrêt de GX8 lorsque la sécurité est ouverte 434
6.3.3 Temps d'arrêt et distance d'arrêt de GX10 lorsque la sécurité est ouverte 440
6.3.4 Temps d'arrêt et distance d'arrêt de GX20 lorsque la sécurité est ouverte 442
6.4 Annexe D : Zone de correction pour la correction de la longueur du bras 444
6.4.1 Série GX4 444
6.4.2 Série GX8 445
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
10

1. Introduction
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
11

1.1 Introduction
Merci d’avoir acheté ce système robotisé Epson. Le présent manuel fournit les informations nécessaires pour utiliser
correctement le système robotisé.
Avant d’utiliser le système, veuillez lire ce manuel et les manuels connexes pour garantir une utilisation correcte.
Après avoir lu ce manuel, rangez-le dans un endroit facilement accessible pour référence future.
Epson effectue des tests et des inspections rigoureux pour s’assurer que les performances de nos systèmes robotisés répondent
à nos normes. Veuillez noter que si le système robotisé Epson est utilisé en dehors des conditions de fonctionnement décrites
dans le manuel, le produit n’atteindra pas ses performances de base.
Le présent manuel décrit les dangers potentiels et les problèmes envisagés. Pour utiliser le système robotisé Epson
correctement et en toute sécurité, veillez à respecter les consignes de sécurité contenues dans ce manuel.
1.2 Marques commerciales
Microsoft, Windows et le logo Windows sont des marques déposées ou des marques commerciales de Microsoft Corporation
aux États-Unis et/ou dans d’autres pays. Tous les autres noms de sociétés, noms de marques et noms de produits sont des
marques déposées ou des marques commerciales de leurs sociétés respectives.
1.3 Conditions d’utilisation
Aucune partie du présent manuel d’instructions ne peut être reproduite ou réimprimée sous quelque forme que ce soit sans
autorisation écrite expresse.
Les informations contenues dans ce document sont susceptibles d’être modifiées sans préavis.
Veuillez nous contacter si vous trouvez des erreurs dans ce document ou si vous avez des questions sur les informations
contenues dans ce document.
1.4 Fabricant
1.5 Informations de contact
Pour en savoir plus sur les informations de contact, voir « FOURNISSEUR » dans le manuel ci-dessous.
« Manuel de sécurité »
1.6 Élimination
Lors de l’élimination de ce produit, veuillez respecter les lois et réglementations de votre pays.
1.7 Avant l’utilisation
Avant d’utiliser le présent manuel, assurez-vous d’avoir bien compris les informations suivantes.
Configuration du système de contrôle
Le manipulateur GX est composé d’une combinaison du contrôleur et du logiciel suivants.
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
12

Manipulateur Contrôleur Logiciel
Série GX-A RC700-D EPSON RC+ 7.0 version 7.5.1B ou ultérieure
Séries GX4-B et GX8-B RC700-E EPSON RC+ 7.0 Version 7.5.4 ou ultérieure
Séries GX10-B et GX20-B EPSON RC+ 7.0 version 7.5.4A ou ultérieure
Réglage à partir du logiciel
Ce manuel contient les procédures de configuration des paramètres à partir du logiciel.
L’utilisation de ce logiciel est indiquée par la marque ci-dessus.
Mise sous tension (hors tension) du contrôleur
Dans le présent manuel, une instruction de « mettre sous tension (hors tension) le contrôleur » signifie mettre sous tension
(hors tension) le matériel qui compose votre contrôleur.
Images utilisées dans ce manuel
Les manipulateurs figurant sur les photos et illustrations du présent manuel peuvent différer de votre manipulateur en termes de
forme et d’apparence en raison de la date d’expédition, des spécifications et d’autres facteurs.
1.8 Types de manuels pour ce produit
Cette section décrit les types de manuels typiques pour ce produit et présente un aperçu de leur contenu.
Manuel de sécurité (livret, manuel PDF)
Ce manuel contient des informations relatives à la sécurité destinées à toutes les personnes qui utilisent ce produit. Il guide
également l’utilisateur tout au long du processus du déballage à l’utilisation, et indique les manuels auxquels se reporter
ensuite.
Veuillez d’abord lire ce manuel.
Consignes de sécurité et risques résiduels des systèmes robotisés
Déclaration de conformité
Formation
Processus du déballage à l’utilisation
Safety Function Manual du contrôleur de robot (manuel PDF)
Ce manuel décrit les procédures de configuration des fonctions de sécurité de ce produit et du logiciel de configuration. Il
est principalement destiné à ceux qui conçoivent des systèmes robotisés.
Manuel du RC700-D, manuel du RC700-E (manuel PDF)
Ce manuel décrit l’installation de l’ensemble du système robotisé et explique les spécifications et les fonctions du
contrôleur. Il est principalement destiné à ceux qui conçoivent des systèmes robotisés.
Procédure d’installation du système robotisé (détails spécifiques sur le processus du déballage à l’utilisation)
Points de l’inspection quotidienne du contrôleur
Spécifications et fonctions de base du contrôleur
Manuel de la série GX (manuel PDF)
Ce manuel décrit les spécifications et les fonctions du manipulateur. Il est principalement destiné à ceux qui conçoivent des
systèmes robotisés.
Installation du manipulateur, informations techniques nécessaires à la conception, tableaux de fonctions et de
spécifications, etc.
EPSON
RC+
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
13

Points de l’inspection quotidienne du manipulateur
Liste des codes d’état/codes d’erreur (manuel PDF)
Cette liste indique les numéros de code affichés sur le contrôleur et les messages affichés dans la zone de message du
logiciel. Elle est principalement destinée à ceux qui conçoivent et programment des systèmes robotisés.
Guide de l’utilisateur d’EPSON RC+ (manuel PDF)
Ce manuel présente un aperçu du logiciel de développement de programmes.
Référence du langage SPEL+ d’EPSON RC+ (manuel PDF)
Ce manuel explique le langage de programmation de robot SPEL+.
Autres manuels (manuels PDF)
Des manuels sont disponibles pour chaque option.
Manuels de maintenance et d’entretien
Les manuels de maintenance et d’entretien ne sont pas fournis avec le produit.
La maintenance doit être effectuée par des personnes ayant reçu la formation à la maintenance dispensée par Epson et les
fournisseurs. Pour plus d’informations, veuillez contacter le fournisseur.
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
14

2. Manipulateur GX4
Ce chapitre contient des informations sur la configuration et le fonctionnement des manipulateurs. Veuillez lire attentivement
ce chapitre avant de configurer et d’utiliser les manipulateurs.
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
15

2.1 Sécurité
Le manipulateur et son équipement connexe doivent être déballés et transportés par des personnes ayant reçu une formation à
l’installation dispensée par Epson et les fournisseurs. De plus, les lois et réglementations du pays d’installation doivent être
respectées.
Avant utilisation, veuillez lire ce manuel et les autres manuels connexes pour garantir une utilisation correcte.
Après avoir lu ce manuel, rangez-le dans un endroit facilement accessible pour référence future.
Ce produit est destiné au transport et à l’assemblage de pièces dans une zone isolée et sûre.
2.1.1 Conventions utilisées dans ce manuel
Les symboles suivants sont utilisés dans le présent manuel pour indiquer des consignes de sécurité importantes. Veillez à lire
les descriptions indiquées avec chaque symbole.
AVERTISSEMENT
Ce symbole indique une situation dangereuse imminente qui, si l’opération n’est pas effectuée correctement,
entraînera la mort ou des blessures graves.
AVERTISSEMENT
Ce symbole indique une situation potentiellement dangereuse qui, si l’opération n’est pas effectuée
correctement, pourrait entraîner des blessures par choc électrique.
ATTENTION
Ce symbole indique une situation potentiellement dangereuse qui, si l’opération n’est pas effectuée
correctement, peut entraîner des blessures ou des dommages matériels uniquement.
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
16

2.1.2 Sécurité de conception et d’installation
Le système robotisé doit être conçu et installé par des personnes ayant reçu une formation à l’installation dispensée par Epson
et les fournisseurs.
Le personnel de conception doit se reporter aux manuels suivants :
« Manuel de sécurité »
« Manuel du contrôleur »
« Manuel du manipulateur »
Reportez-vous à la section suivante pour les consignes de sécurité d’installation.
Environnement et installation
Veillez à lire cette section et à respecter les consignes de sécurité avant l’installation pour vous assurer que les travaux
d’installation sont effectués en toute sécurité.
2.1.2.1 Résistance de l’arbre cannelé à billes
Si une charge supérieure à la charge de flexion admissible est appliquée à l’arbre cannelé à billes, celui-ci peut ne pas
fonctionner correctement en raison de la déformation ou de la rupture de l’arbre.
Si une charge supérieure à la valeur admissible est appliquée à l’arbre cannelé à billes, l’unité d’arbre cannelé à billes doit être
remplacée.
La charge admissible varie en fonction de la distance sur laquelle la charge est appliquée. Pour calculer la charge admissible,
reportez-vous à la formule ci-dessous.
Moment de flexion admissible
GX4 : M=13 000 N∙mm
Exemple de calcul : Charge de 130 N appliquée à 100 mm de l’extrémité de l’écrou cannelé
Moment
M=F∙L=100∙130=13 000 N∙mm
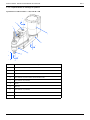
Symbole Description
a Extrémité de l’écrou cannelé
L
F
a
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
17

2.1.3 Sécurité de fonctionnement
Les consignes de sécurité pour le personnel d’exploitation sont indiquées ci-dessous :
AVERTISSEMENT
Veillez à lire le manuel de sécurité avant utilisation. L’utilisation du système robotisé sans comprendre les
consignes de sécurité peut être extrêmement dangereuse et peut entraîner des blessures graves ou des
dommages matériels importants.
Avant d’utiliser le système robotisé, assurez-vous que personne ne se trouve à l’intérieur des barrières de
sécurité. Le système robotisé peut être utilisé en mode opérationnel d’apprentissage même lorsque
quelqu’un se trouve à l’intérieur des barrières de sécurité. Même si le mouvement du manipulateur est
toujours limité (basse vitesse et faible puissance) pour assurer la sécurité de l’opérateur, un mouvement
inattendu du manipulateur peut être extrêmement dangereux et entraîner de graves problèmes de sécurité.
Si le manipulateur effectue des mouvements anormaux pendant le fonctionnement du système robotisé,
n’hésitez pas à appuyer immédiatement sur l’interrupteur d’arrêt d’urgence.
AVERTISSEMENT
Pour effectuer le verrouillage de l’alimentation, débranchez la fiche d’alimentation. Veillez à connecter le
câble d’alimentation secteur à une prise de courant. Ne le connectez pas directement à une source
d’alimentation d’usine.
Avant d’effectuer tout travail de remplacement, informez les autres personnes présentes dans la zone que
vous travaillez, puis mettez le contrôleur et l’équipement connexe hors tension et débranchez le câble
d’alimentation de la source d’alimentation. L’exécution de toute procédure de travail sous tension est
extrêmement dangereuse et peut entraîner un choc électrique et/ou un dysfonctionnement du système
robotisé.
Ne branchez ou ne débranchez pas le connecteur du câble M/C lorsque le contrôleur est sous tension. Il
existe un risque de dysfonctionnement du manipulateur, ce qui est extrêmement dangereux. De plus,
l’exécution de toute procédure de travail sous tension peut entraîner un choc électrique et/ou un
dysfonctionnement du système robotisé.
ATTENTION
En règle générale, le système robotisé doit être opéré par une seule personne. Si plusieurs personnes
doivent l’opérer, assurez-vous que tous les membres du personnel communiquent entre eux et prennent
toutes les précautions de sécurité nécessaires.
Articulations #1, #2 et #4 :
L’utilisation répétée du manipulateur avec un angle de fonctionnement de 5° ou moins peut entraîner un
manque de film d’huile au niveau des roulements utilisés dans les articulations. Un fonctionnement répété
peut entraîner des dommages prématurés. Pour éviter des dommages prématurés, utilisez le manipulateur
pour déplacer chaque articulation à un angle de 50° ou plus environ une fois par heure.
Articulation #3 :
Si le mouvement de haut en bas de la main est de 10 mm ou moins, déplacez la main d’environ la moitié ou
plus de sa course maximale environ une fois par heure.
Lorsque le robot fonctionne à basse vitesse (vitesse : 5 à 20 %), des vibrations (résonance) peuvent se
produire en continu pendant le fonctionnement en fonction de la combinaison de l’orientation du bras et de la
charge de la main. Les vibrations se produisent en raison de la fréquence de vibration naturelle du bras et
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
18

peuvent être réduites en prenant les mesures suivantes :
Modification de la vitesse du robot
Modification des points d’apprentissage
Modification de la charge manuelle
2.1.4 Arrêt d’urgence
Chaque système robotisé nécessite un équipement qui permettra à l’opérateur d’arrêter immédiatement le fonctionnement du
système. Installez un dispositif d’arrêt d’urgence à l’aide de l’entrée d’arrêt d’urgence du contrôleur ou un d’autre équipement.
Avant d’utiliser l’interrupteur d’arrêt d’urgence, tenez compte des points suivants.
L’interrupteur d’arrêt d’urgence doit être utilisé pour arrêter le manipulateur uniquement en cas d’urgence.
Outre l’appui sur l’interrupteur d’arrêt d’urgence en cas d’urgence, utilisez les instructions Pause ou STOP (arrêt du
programme) attribuées à une E/S standard pour arrêter le manipulateur pendant le fonctionnement du programme.
Les instructions Pause et STOP ne coupent pas l’alimentation du moteur et le frein n’est donc pas bloqué.
Pour mettre le système robotisé en mode d’arrêt d’urgence dans une situation non urgente (normale), appuyez sur l’interrupteur
d’arrêt d’urgence lorsque le manipulateur ne fonctionne pas.
N’appuyez pas inutilement sur l’interrupteur d’arrêt d’urgence lorsque le manipulateur fonctionne normalement.
Cela pourrait raccourcir la durée de vie des composants suivants.
Freins
Les freins seront bloqués, ce qui raccourcira la durée de vie des freins en raison de plaques de friction de frein usées.
Durée de vie normale des freins :
Environ 2 ans (lorsque les freins sont utilisés 100 fois/jour)
ou environ 20 000 fois
Réducteurs
Un arrêt d’urgence applique un choc sur le réducteur, ce qui peut raccourcir sa durée de vie.
Si le manipulateur est arrêté en mettant le contrôleur hors tension alors qu’il fonctionne, les problèmes suivants peuvent
survenir.
Réduction de la durée de vie et endommagement du réducteur
Décalage de position au niveau des articulations
Si une panne de courant ou toute autre mise hors tension inévitable du contrôleur se produit pendant le fonctionnement du
manipulateur, vérifiez les points suivants après le rétablissement de l’alimentation.
Endommagement du réducteur
Décalage des articulations de leurs positions appropriées
En cas de décalage, la maintenance est nécessaire. Pour plus d’informations, veuillez contacter le fournisseur.
Distance d’arrêt de l’arrêt d’urgence
Le manipulateur en cours de fonctionnement ne peut pas s’arrêter immédiatement après avoir appuyé sur l’interrupteur d’arrêt
d’urgence. De plus, le temps d’arrêt et la distance de déplacement varient en fonction des facteurs suivants.
Poids de la main, réglage WEIGHT, réglage ACCEL, poids de la pièce, réglage SPEED, posture de mouvement, etc.
Pour en savoir plus sur le temps d’arrêt et la distance de déplacement du manipulateur, reportez-vous à la section suivante.
Annexe B : Temps d’arrêt et distance d’arrêt lors d’un arrêt d’urgence
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
19

2.1.5 Sécurité (SG)
Pour maintenir une zone de travail sûre, des barrières de sécurité doivent être installées autour du manipulateur et des sécurités
doivent être installées à l’entrée et à la sortie des barrières de sécurité.
Le terme « sécurité » tel qu’il est utilisé dans ce manuel fait référence à un dispositif de sécurité avec un verrouillage qui
permet l’entrée dans les barrières de sécurité. Plus précisément, cela inclut les interrupteurs de porte de sécurité, les barrières
de sécurité, les barrières immatérielles, les portes de sécurité, les tapis de sol de sécurité, etc. La sécurité est une entrée qui
informe le contrôleur de robot qu’un opérateur peut se trouver à l’intérieur de la zone de sécurité. Vous devez affecter au moins
une Sécurité (SG) dans le Gestionnaire des fonctions de sécurité.
Lorsque la sécurité est ouverte, l’arrêt de protection fonctionne pour passer à l’état de sécurité ouverte (affichage : SO).
Sécurité ouverte
Les opérations sont interdites. Toute autre opération du robot n’est pas possible tant que la sécurité n’est pas fermée, que
l’état verrouillé n’est pas libéré et qu’une commande n’est pas exécutée, ou que le mode opérationnel TEACH ou TEST
n’est pas activé et que le circuit d’activation n’est pas activé.
Sécurité fermée
Le robot peut fonctionner automatiquement dans un état illimité (haute puissance).
AVERTISSEMENT
Si un tiers libère accidentellement la sécurité pendant qu’un opérateur travaille à l’intérieur des barrières de
sécurité, cela peut entraîner une situation dangereuse. Pour protéger l’opérateur travaillant à l’intérieur des
barrières de sécurité, mettez en place des mesures pour verrouiller ou étiqueter l’interrupteur de
déverrouillage.
Pour protéger les opérateurs travaillant à proximité du robot, veillez à connecter un commutateur de sécurité
et assurez-vous qu’il fonctionne correctement.
Installation de barrières de sécurité
Lors de l’installation de barrières de sécurité dans la portée maximale du manipulateur, combinez des fonctions de sécurité
telles que SLP. Tenez compte de la taille de la main et des pièces à tenir afin qu’aucune interférence ne se produise entre les
éléments de commande et les barrières de sécurité.
Installation des sécurités
Concevez les sécurités de sorte qu’elles répondent aux exigences suivantes :
Lors de l’utilisation d’un dispositif de sécurité de type interrupteur à clé, utilisez un interrupteur qui ouvre de force les
contacts de verrouillage. N’utilisez pas d’interrupteurs qui ouvrent leurs contacts à la force du ressort du verrouillage.
Lors de l’utilisation d’un mécanisme de verrouillage, ne désactivez pas le mécanisme de verrouillage.
Considération de la distance d’arrêt
Pendant le fonctionnement, le manipulateur ne peut pas s’arrêter immédiatement même si la sécurité est ouverte. De plus, le
temps d’arrêt et la distance de déplacement varient en fonction des facteurs suivants.
Poids de la main, réglage WEIGHT, réglage ACCEL, poids de la pièce, réglage SPEED, posture de mouvement, etc.
Pour en savoir plus sur le temps d’arrêt et la distance de déplacement du manipulateur, reportez-vous à la section suivante.
Annexe C : Temps d'arrêt et distance d'arrêt lorsque la sécurité est ouverte
Précautions pour le fonctionnement de la sécurité
N’ouvrez pas la sécurité inutilement lorsque le moteur est sous tension. Des entrées de sécurité fréquentes réduiront la durée de
vie du relais.
Durée de vie normale du relais : environ 20 000 fois
Robot industriel : Robots SCARA Manuel de la série GX Rev.7
20
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445





























































































































































































































































































































































































































































Epson GX20B SCARA Robots Manuel utilisateur
- Taper
- Manuel utilisateur
- Ce manuel convient également à
Documents connexes
Autres documents
-
Miller I10 MANIPULATOR AND CBM CONTROLLER Le manuel du propriétaire
-
-
-
ESAB Xcellerator Manuel utilisateur
-
Kenwood TS-590S Le manuel du propriétaire
-
OTC 5018A Mode d'emploi
-
Kenwood TS-480HX Le manuel du propriétaire
-
Kenwood TS-2000 Le manuel du propriétaire
-
Sunex Tools 1330 Le manuel du propriétaire