MULTIPLEX Erweitert Wingstabi Le manuel du propriétaire
- Catégorie
- Jouets télécommandés
- Taper
- Le manuel du propriétaire
Ce manuel convient également à
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

Seite 5/39
!
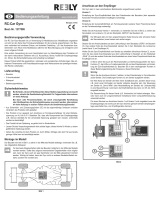
Figure 4: WINGSTABI pro socket assignment
Figure 3: WINGSTABI socket assignment
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

Seite 36/39
!
Menu structure
Figure 28: Mobile Launcher WINGSTABI menu structure
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

Seite 1/39
!
Mode d’emploi avancé pour la version 1.2.7
du firmware WINGSTABI
Sommaire
Généralités ....................................................................................................................... 2
Pos. montage ................................................................................................................... 3
Voies de commande ......................................................................................................... 4
Première installation du WINGSTABI ............................................................................... 4
Individualisation ................................................................................................................ 7
Extension des canaux de commande .............................................................................. 8
Une offre de trois modèles de base ............................................................................... 10
Activation de la commande des aérofreins .................................................................... 11
Sorties de servo du WINGSTABI ................................................................................... 12
Régler le capteur gyroscopique ...................................................................................... 13
Réglages des phases du gyroscope .............................................................................. 14
Regulation (base) ........................................................................................................... 15
Regulation (avancé) ....................................................................................................... 16
Menu outils ..................................................................................................................... 19
Compensation du modèle .............................................................................................. 20
Reprise de la compensation par commutation rapide .................................................... 20
Compensation via des canaux de compensation dédiés ............................................... 21
Mode de vol compensé .................................................................................................. 21
Programmation de la commande des aérofreins ........................................................... 22
Modèles motorisés avec ailes à 4 aérofreins (FunCub XL)
..................................... 22
Modèle de planeur avec ailes à 4 volets (Heron) .................................................. 26
Mis à jour du firmware .................................................................................................... 30
ANNEXE ......................................................................................................................... 31
Compensation Profi TX et télémétrie pour WINGSTABI ............................................ 31
Bluetooth et Android .................................................................................................. 33
Adapteur Bluetooth ................................................................................................ 33
Launcher Mobile .................................................................................................... 35
Structure De Menu ................................................................................................. 36
État ........................................................................................................................ 37
Configuration ......................................................................................................... 37
Phases de gyroscope ............................................................................................ 38
Garantie/exclusion de responsabilité ............................................................................. 39
Mode d’emploi avancé Wingstabi (STHE) ▪ Sophismes et sous réserve de modification! ▪ © MULTIPLEX

Seite 2/39
!
Généralités
Lors de l’initiation à la programmation de WINGSTABI, deux scenarii peuvent être suivis
par définition, qui sont conditionnés par deux versions différentes de WINGSTABI : Les
modèles réduits avec des émetteurs M-LINK communiquent en général avec le
WINGSTABI avec récepteur M-LINK intégré, alors que les pilotes avec d’autres
systèmes de transmission HF utilisent des versions sans récepteur intégré.
Le firmware WINGSTABI est compatible avec les récepteurs RC avec les signaux de
sortie suivants: PPM, Futaba S.BUS*, MULTIPLEX SRXL, Graupner SUMD et SUMO,
Jeti UDI, JR XBUS Mode B et le signal S.BUS Signal de nombreux autres fabricants
comme p. ex. HiTEC et FrSky. Les signaux de série de ces récepteurs sont reliés au
port d’entrée (IN, voir schéma d’attribution des fiches) du WINGSTABI. Ce
raccordement assure aussi l’alimentation électrique commune. Dans WINGSTABI, le
type de récepteur doit bien entendu être correctement sélectionné.
* WINGSTABI est compatible avec le signal Futaba S.BUS Signal de FASST- ainsi que (à partir de
la version de firmware 1.1.1) le mode 12CH des récepteurs FASSTest.
Les systèmes de transmission travaillant avec le protocole de télémétrie de
MULTIPLEX peuvent récupérer les données de télémétrie du WINGSTABI sur le port
MBS (Multiplex Sensor Bus) et se raccorder à l’entrée MSB de votre récepteur. Pour un
WINGSTABI avec récepteur M-LINK intégré, ce raccordement est réalisé en interne, le
port MSB peut alors recevoir des capteurs externes additionnels. Le port d’entrée n’a
pas de fonction sur le WINGSTABI avec récepteur intégré et peut, sur les versions à 7
ou 9 canaux, être utilisé en plus pour l’alimentation électrique.
Le port B/D (batterie et données) reçoit le raccordement de l’interface USB/PC ou du
module Bluetooth pour la programmation du WINGSTABI. Pour les réglages et les
mises à jour, le Launcher MULTIPLEX sous Windows et l’appli Launcher MULTIPLEX
sous Android sont disponibles gratuitement. Il est également recommandé de raccorder
l’alimentation électrique au port B/D de la version 9 canaux. Un récepteur externe est
alors alimenté en électricité via le branchement de données au port d’entrée. La version
7 canaux propose deux ports BAT dédiés pour l’alimentation électrique.
Les versions Pro 12 et 16 canaux ont à la fois deux ports DAT en lieu et place des ports
B/D pour les interfaces (dont un seul doit être occupé) et deux ports MSB pour la
télémétrie (les deux peuvent être utilisés en parallèle). Pour l’alimentation électrique du
WINGSTABI et des servos et capteurs qui y sont raccordés, deux prises MPX à 6 pôles
avec double alimentation intégrée sont prévues. Les versions Pro peuvent
UNIQUEMENT être alimentées via ces connecteurs haute intensité. Tous les autres
raccordements doivent être sécurisés à l’aide de disjoncteurs (à retard) 5A.

Seite 3/39
!
Pos. montage
!
INDICATION IMPORTANTE : Le gyroscope doit être monté de manière
parfaitement horizontale par rapport à l’axe de vol et ne pas se déplacer par
rapport à la carlingue. Ceci est à respecter impérativement pour tous les 3 axes
du modèle pour le WINGSTABI ! Des montages inclinés entraînent des
corrections sur la mauvaise gouverne, des vibrations peuvent affecter le
système (la fixation par bande velcro N’EST DONC PAS recommandée).
Illustration 1 : Montage, vue latérale
Illustration 2 : Montage, vue du dessus

Seite 4/39
!
Voies de commande
Toutes les versions WINGSTABI avec ou sans récepteur M-LINK intégré acceptent au
niveau de l’entrée en général jusqu’à 16 canaux de commande (suivant le matériel RC
parfois jusqu’à 18) ; au niveau de la sortie, selon la version 7, 9, 12 ou 16 canaux pour les
servos analogiques ou numériques (les plus récents permettent des débits de données
sensiblement plus élevés). La fréquence servo pour chaque servo est réglable séparément,
de sorte qu’il est même possible de mettre sur pied un mode de fonctionnement mixte avec
des servos analogiques et numériques avec des fréquences servo différentes pour un
modèle donné.
Les canaux qui ne doivent pas être « supportés » peuvent passer par WINGSTABI ou être
directement être raccordés à la sortie du servo du récepteur externe. Ceci est valable pour
les commandes de crochet, trappes de largage, trains d’atterrissage et projecteur. Avec une
séparation suivant les canaux d’entrée et de sortie, la répartition des canaux sur
WINGSTABI est entièrement configurable, de sorte qu’il est facile de s’adapter à n’importe
quel schéma de branchement imposé par l’installation.
De manière générale, les mixages doivent se faire dans WINGSTABI. En tout état de cause,
un Dualrate et un Expo commutables sont conseillés au niveau de l’émetteur. Si dans des
cas inévitables, des mixages doivent avoir lieu au niveau de l’émetteur, veiller à ce qu’à
partir de celui-ci, il n’y ait aucun débattement sur des canaux supportés, en particulier pour
les commandes de profondeur, direction et ailerons. Le WINGSTABI percevrait de tels
signaux comme des modifications délibérées de direction et, à tout le moins en mode
Heading (cap), provoquerait des débattements de gouvernes en continu. Ce n’est qu’en
mode Stabilisation pur que cela fonctionne sans aucun effet secondaire.
Première installation du WINGSTABI
Vient ensuite l’aspect pratique de l’installation du WINGSTABI dans le modèle. Un
WINGSTABI neuf nécessite d’être raccordé via un câble USB ou une interface Bluetooth à
un PC avec le Launcher installé pour le paramétrage de base du système. On a ici le choix
entre quatre options : « Assistant », « Exemple de modèle », « Import » et « Manuel ». Dans
tous les cas, l’émetteur doit être raccordé au récepteur sans aucune préprogrammation ni
aucun raccordement de mixage. Préprogrammation signifie qu’à chaque axe à commander
et au canal des gaz doit être attribué une commande et un canal. Sur un modèle simple, ce
serait les gaz, les ailerons et les gouvernes de profondeur et de direction. Pour pouvoir
utiliser en premier lieu deux ou trois des quatre phases gyroscopiques possibles, il est
recommandé d’avoir un interrupteur à deux ou trois positions avec servo-canal attribué.
Conseil : Si le câble de raccordement de l’interface USB est trop court, ne pas rallonger le
cordon du servo à trois brins, mais le câble USB entre l'ordinateur et l'interface.

Seite 5/39
!
Illustration 3 : Attribution des branchements WINGSTABI
Illustration 4 : WINGSTABI par attribution des branchements

Seite 6/39
!
!
INDICATION IMPORTANTE : Les batteries raccordées au WINGSTABI
doivent être débranchées à la fin de la journée de vol, même si un
commutateur est utilisé pour la double alimentation intégrée car les batteries
subissent autrement une décharge, lente mais certaine, liée aux courants
résiduels.
Sur un WINGSTABI avec récepteur intégré, la transmission des signaux entre le
récepteur et le gyroscope se fait automatiquement. Sur les récepteurs externes, veiller
à un bon paramétrage des signaux. Les récepteurs MPX externes doivent être
paramétrés à l’aide du Launcher sur MULTIPLEX SRXL, d’autres systèmes nécessitent
d’autres paramétrages pour la transmission des données en série. Tenir ici
impérativement compte des consignes du récepteur.
Pour un débutant en termes de commande gyroscopique, le mode « Assistant » est la
meilleure solution sauf à équiper un des modèles mentionnés dans la rubrique «
Exemple de modèle ». L’« Assistant » guide l’utilisateur pas-à-pas à travers la
configuration de base avec de nombreuses explications, y compris la bonne sélection
du récepteur en termes de format de signal en série avec des récepteurs externes. Les
actionnements des différentes manettes mènent vers les bonnes attributions des
canaux, le type de modèle et le type de servo sont à déterminer. Les servos sont
raccordés au WINGSTABI comme indiqué sur le schéma, leur sens de mouvement est
vérifié. La position du gyroscope dans le modèle est également interrogée pour pouvoir
ensuite vérifier le sens d’action des débattements de correction. La configuration est
ainsi menée à bien, il est maintenant possible de passer aux réglages fins.
Celui qui appelle des données de modèle intégrées parcourt grosso modo les mêmes
étapes, mais bénéficie pour le modèle sélectionné de réglages gyroscopiques affinés.
Si le modèle a été acheté comme « Version RR » de MPX, la position et les sens de
rotation et d’action du gyroscope ainsi que les débattements de tous les servos sont
bien entendu déjà programmés et n’ont plus qu’à être contrôlés.
L’option « Import » permet de récupérer des configurations de gyroscopes déjà
enregistrées sur un ordinateur. Celles-ci peuvent être des données personnelles, mais
aussi celles d’autres utilisateurs de WINGSTABI. Ces données doivent être
enregistrées dans le bon répertoire. Ces données de configuration présentent
l’extension de fichier « .wcf » (wingstabi configuration file).
La sélection initiale de l’option « Manuel » envoie vers l’écran de démarrage qui se
base sur une configuration de base définie dans le WINGSTABI. La navigation
manuelle au travers des pages de menu permet de régler le WINGSTABI en fonction de
la configuration effective du modèle pour ce qui est attribution, types et sens
d’actionnement des servos, attribution des canaux, etc.

Seite 7/39
!
Individualisation
Quel que soit le chemin emprunté pour accéder aux réglages de base, l’utilisateur
atterrit toujours sur l’écran de démarrage. Ici aussi, des réglages de base sont à l’ordre
du jour. Pour cela, (presque) chaque page d’écran propose pour les réglages de base
une page de base et pour les réglages fins rarement utilisés une page avancée. La
commutation se fait en haut à droite dans la barre de menu avec la petite étoile.
La page « Info » présente les informations de base concernant le WINGSTABI et l’état
actuel du système. La phase gyroscopique en cours est représentée de manière
soulignée. Il doit bien entendu y avoir aussi une liaison entre l’émetteur, le récepteur et le
gyroscope. Si tel n’est pas le cas, une indication correspondante est affichée en rouge
sous « État ». Les erreurs système sont répertoriées dans un répertoire d’erreurs
spécifique. Celles-ci peuvent être lues et effacées sous « Avancé ».
Si l’état est « Prêt » (en vert), il est possible de contrôler les trois signaux de réception
pour les trois directions par des mouvements de commandes. La sensibilité gyroscopique
de ces gouvernes est représentée en-dessous ; suivant la phase sélectionnée, celle-ci
peut être programmée de manière différenciée. En-dessous se trouve également un axe
temporel qui représente graphiquement les signaux de correction du gyroscope en temps
réel. Déplacer une fois le modèle avec gyroscope autour de chaque axe. La ligne rouge
indique les ailerons, la bleue la gouverne de profondeur et la verte celle de direction.
Illustration 5 : Page d’info WINGSTABI

Seite 8/39
!
Passer maintenant à « Avancé » pour voir les canaux d’entrée RC présentement
définis, les sorties de servo attribuées et les trois intégrateurs qui bien évidemment
n’indiquent que des débattements si dans la phase sélectionnée le gyroscope est
effectivement actif.
Extension des canaux de commande
Pour l’étape suivante, cliquer sur le symbole Radio dans la barre de titre pour parvenir à
la fenêtre principale d’attribution des canaux. Les attributions qui y sont présentées
peuvent y être librement modifiées ou étendues. Il est par exemple possible d’y ajouter
un canal de commutation additionnel de l’émetteur pour la quatrième phase de
gyroscope (auparavant, attribuer un interrupteur à deux positions à un canal dans
l’émetteur). Pour cela, cliquer sur le champ où il est mentionné « Non attribué » à ce
moment-là. Une fois la fenêtre d’attribution ouverte, déplacer le commutateur souhaité
sur l’émetteur et l’identifier de telle manière. Un clic sur le champ correspondant
complète l’attribution. Ce commutateur, qui dans sa position initiale active la phase 1,
permet maintenant de valider les autres phases de l’interrupteur à trois positions. Quelle
que soit sa position, l’interrupteur à deux positions permet toujours de revenir à la
phase 1. Selon la position, l’interrupteur à trois positions sélectionne alors les phases 2,
3 ou 4. La phase 1 est définie comme « Gyroscope arrêt » et doit être laissée telle
quelle pour des raisons de sécurité.
Il est maintenant possible de définir – à l’aide d’un curseur ou d’une molette sur
l’émetteur - encore de un à trois canaux d’entrée pour la commande de la sensibilité
(Gain) du gyroscope par émetteur. C’est le canal 6 qui est prévu pour cela au niveau du
préréglage. La plupart du temps, il suffit de régler simultanément la sensibilité des trois
axes à l’aide d’un seul canal car cette fonction n’est la plupart du temps utile que pour
l’optimisation de l’efficacité maximale du gyroscope.
!
INDICATION IMPORTANTE : Les batteries raccordées au WINGSTABI
doivent être débranchées à la fin de la journée de vol, même si un
commutateur est utilisé pour la double alimentation intégrée car les batteries
subissent autrement une décharge, lente mais certaine, liée aux courants
résiduels.

Seite 9/39
!
Le même écran propose les paramétrages de télémétrie pour les systèmes MSB.
Sélectionner là au choix « M-LINK-Standard » ou « PROFI-TX » resp. « Affichage
télémétrie ». PROFI-TX et Affichage télémétrie donnent de plus longues appellations de
valeurs que par exemple M-LINK-Standard de Royal SX. Trier ensuite les adresses des
capteurs toujours au choix en veillant à éviter toute attribution double. Sur les
récepteurs M-LINK, l’adresse « 1 » est réservée à la surveillance de la liaison, ne pas
l’attribuer autrement. La surveillance de la tension du récepteur est également pré-
attribuée sur le M-LINK. En l’absence de télémétrie compatible MSB, régler sur «
Désactivé ».
Illustration 6 : Attribution des canaux WINGSTABI

Seite 10/39
!
Une flèche clignotante rouge en haut à droite indique, comme dans tous les menus
acceptant des modifications, selon la situation, qu’il faut transmettre les modifications
effectuées au gyroscope ; cliquer pour cela tout simplement sur le champ avec la
flèche.
La fenêtre « Avancé », à laquelle on peut ensuite passer, propose des réglages à ne
pas modifier sans raisons impérieuses. Passer le curseur de la souris sur les champs
d’entrée pour obtenir des explications succinctes.
!
INDICATION IMPORTANTE : Après chaque modification de la configuration, il
est conseillé de sauvegarder les données du WINGSTABI sur un ordinateur.
Utiliser pour cela la fonction « Sauvegarder données de paramétrage » dans le
menu déroulant en haut à gauche. Attribuer aux données des noms de fichiers
aussi explicites que possibles, p. ex. avec le modèle de l’avion et de la
mémoire de l’émetteur. Pour recharger les données, sélectionner « Changer
données de paramétrage » puis entrer le nom du fichier.
Une offre de trois modèles de base
Cliquer sur le symbole avion sur la barre de menu pour ouvrir la fenêtre de sélection
pour les caractéristiques de base du modèle : les modèles disponibles sont aile delta,
monoplan classique, aile volante. Sur la même page se trouvent dans la fenêtre de
base le mixage des spoilers et des gouvernes de direction et une activation
trappes/volets à disposition. Sous « Avancé », il est même possible d’activer une
fonction SnapFlap pour les monoplans classiques qui va mixer de manière
proportionnelle le débattement de la gouverne de profondeur aux ailerons.
Sur la même page se trouve une compensation gouverne de profondeur - gaz. Celle-ci
est uniquement nécessaire si un modèle se cabre lors d’une accélération ou, plus
rarement, pique du nez. Ceci est un exemple clair de défaut d’alignement du moteur,
qui à cet endroit peut très simplement se corriger à l’aide d’un mixage automatique des
gouvernes de profondeur. Le point de réglage du mixage se définit aisément avec une
valeur minimale des gaz.

Seite 11/39
!
Activation de la commande des aérofreins
À partir de la version logicielle 1.2.7, et le spoiler et les volets peuvent être configurés de
différentes manières (phases gyroscopiques, canal de commutation ou phases de volets
spéciales), de sorte que des ailes à quatre volets pour les modèles motorisés et à six volets
pour les planeurs sont aisément réalisables, correction de gouverne de profondeur
comprise. Le Butterfly est bien entendu également possible, ainsi que des déporteurs ou
des Snapflaps sur tous les volets souhaitables.
Les avions MPX Heron et FunCub sont des exemples de modèles typiques à quatre volets.
Sur le Heron, on pourra coupler les aérofreins intérieurs avec les ailerons, avec souvent
moins de débattement que ce que font les ailerons seuls. On peut par ailleurs bien régler
les aérofreins intérieurs vers le bas et les ailerons (moins) vers le haut, ce qu’on appelle la
position Butterfly (papillon) comme aide à la descente ou aérofrein (spoiler). Une courbure
réduite avec les quatre volets vers le haut (position Speed) et vers le bas (position
Décollage et Thermique) est souvent recherchée.
Sur le FunCub au contraire les volets seront dans le cas normal en fin de course alignés au
profil (pas de sortie de volet) et à l’autre fin de course entièrement sortis. Chaque position
intermédiaire (commandée par interrupteur à trois positions ou curseur) est bien entendu
possible et autorisée. Un mixage avec les ailerons ne peut en revanche pas avoir lieu.
Illustration 7 : Présélection des modèles et volets

Seite 12/39
!
Pour régler les volets activés à cette entrée de menu, un nouveau symbole menu de
volets apparaît derrière le symbole avion après l’activation. Bien entendu, au niveau de
l’émetteur, les commandes et canaux des volets doivent être attribués comme les
canaux de commande et servos de volets dans le WINGSTABI. Le sujet «
Programmation de la commande des aérofreins » fait l’objet d’un chapitre dédié.
Sorties de servo du WINGSTABI
Quand on ouvre le menu avec le symbole Servo, on parvient suivant la version de
WINGSTABI, à l’affichage d’un certain nombre de sorties de servos, que l’on va pouvoir
maintenant attribuer en correspondance aux servos montés dans le modèle. Cette
attribution n’a RIEN à voir avec celle des canaux de servos d’entrée (venant de
l’émetteur). Ici, le choix est entièrement libre. Il est toutefois recommandé de suivre le
standard de son système de radiocommande pour bénéficier d’une attribution
compréhensible. Les systèmes MPX utilisent en général le servo 1 pour l’aileron
gauche, le servo 5 pour l’aileron droit, le servo 2 pour la profondeur, le servo 3 pour la
direction et le servo 4 pour les gaz. Pour toute modification, cliquer à gauche sur le
servo correspondant, il apparaît alors sur fond rouge.
Illustration 8 : Configuration des sorties de servo

Seite 13/39
!
Définir ensuite sur le côté droit la fonction et le type du servo. Suivant la version du
gyroscope, un certain nombre de sorties sont disponibles. Au milieu, à côté du servo
HiTEC représenté, régler le neutre du servo et les deux fins de course comme ces
points sont requis pour les battements de gouverne prévus. Les valeurs préréglées sont
1100, 1500 et 1900, sur les équipements MPX ces valeurs peuvent être recommandées
jusqu’à 1000, 1500 et 2000. Le sens de rotation de chaque servo peut également être
inversé ici si nécessaire.
À la fin du réglage des servos, définir pour chaque servo ce qu’il doit faire en cas de
perte de réception. Pour les régulateurs de gaz sans balais (brushless), le meilleur
choix est « Désactiver servo ». Il est autrement possible de choisir entre « Maintenir
position » (standard) et « Définir position ». Dans le dernier cas, on peut reprendre la
position actuelle du servo ou déterminer une position quelconque par entrée via le
clavier ou à l’aide des touches de flèche.
Conseil : Pour les commandes de moteur pilotées par WINGSTABI et ayant un ralenti
et une position pleins-gaz réglables, cette position doit être renseignée à neuf.
Régler le capteur gyroscopique
Dans l’entrée de menu Capteur, à droite à côté du symbole Servo, la fenêtre de base
permet le réglage de la position de montage et du sens d’actionnement du
WINGSTABI. Dans le cas normal, ceci a déjà été fait au début avec l’assistant. Dans la
fenêtre « Avancé », il est encore possible de sélectionner le réglage pour le filtre passe-
bas et la zone morte, mais ne pas en modifier les préréglages sans nécessité
impérieuse. Sur un modèle avec moteur thermique et en cas de fortes vibrations, le
réglage peut par exemple être amélioré avec une fréquence de seuil inférieure sur le
filtre passe-bas.

Seite 14/39
!
Réglages des phases du gyroscope
Le présent paragraphe expose plus en détail le réglage propre du gyroscope, qui bien
évidemment est particulier pour chaque phase de gyroscope. Dans la phase de
gyroscope 1, il est recommandé - pour des raisons de sécurité - de ne pas effectuer de
modifications, c’est le réglage standard ex-usine sans aucune modification (Gyroscope
arrêt). Ceci permet de ‘sauver’ un vol en cas de problème sérieux à cause d’un réglage
défavorable.
Cliquer avec le bouton droit de la souris sur le symbole « 1 ». La première ligne
présente le réglage standard, en-dessous se trouvent les réglages alternatifs. La
configuration est la même pour toutes les phases et facilite grandement les réglages. La
phase 2 sert en général à l’amortissement (standard ou optimisé), la phase 3 à la
stabilisation complète (Headinghold) et la phase 4 au torque-roll, donc un mode
Heading extrême.
Il est par ailleurs possible de copier n’importe quelle valeur d’une phase de gyroscope
vers une autre par glisser-déposer (à l’aide de la souris). Ceci est utile si l’on a vérifié
des réglages de la phase 3 (Heading modéré) et que l’on souhaite les reprendre en
phase 4 (Heading avancé) pour les y ‘affiner’.
Cliquer ensuite sur « Avancé » pour parvenir aux réglages fins de chaque phase de
gyroscope sélectionnée, qui sont expliqués au paragraphe suivant. Dans ces fenêtres, il
y a aussi pour chaque phase de gyroscope la possibilité de programmer un
commutateur et il y est aussi possible de définir un décalage statique de profondeur par
phase.
!
INDICATION IMPORTANTE : Tous les préréglages de WINGSTABI peuvent
se modifier soit par curseur, à l’aide des touches de flèche ou par entrée
directe de la valeur numérique. Après chaque modification, un transfert vers
WINGSTADI est toujours nécessaire et une sauvegarde des données est
recommandée.

Seite 15/39
!
Regulation (base)
Sensibilité selon l’émetteur
Un canal de sensibilité spécifique permet d’influencer la sensibilité globale (gain) des
axes. Différentes plages peuvent être réglées, p. ex. ±10. Si par exemple la sensibilité
globale est réglée à 40 et la plage à ±10, la sensibilité via l’émetteur peut varier de 30 à
50.
Sensibilité (globale)
La sensibilité globale agit sur tous les composants du régulateur, donc sur P, I et D
(explications page suivante). Une fois le rapport idéal entre P, I et D trouvé, le gain
global peut aider à procéder à l’adaptation complète du système. Suivant la météo, il
peut être utile d’augmenter ou de réduire de manière minimale la sensibilité globale.
Illustration 9 : Paramétrages de régulation de base

Seite 16/39
!
Manœuvrabilité / vitesse de tonneau
Si par exemple le modèle réagit trop fortement aux commandes, réduire la valeur à
moins de 100. Si l’on souhaite voir son modèle réagir avec plus d’ardeur, mettre la
valeur au-dessus de 100. On recommande ici des pas de 10.
Regulation (avancé)
Part directe
Il s’agit ici de la part de gouverne transmise directement aux gouvernes sans régulation.
Une part directe trop faible entraîne un comportement en vol indirect et lent. Une part
directe trop grande peut avec une régulation active avec composante I entraîner un
retournement du modèle lors du retour de manette.
Illustration 10 : Paramétrages avancés en phase gyroscopique 3

Seite 17/39
!
Proportionnel (composante P)
La composante P de la régulation est une composante de la régulation PID qui réagit
rapidement aux écarts de régulation. Il s’agit d’un facteur du défaut de régulation
reconnu (écart entre valeur de consigne et valeur réelle). La majeure partie de la
régulation se fait via la composante P.
Sensibilité
Si la composante P est réglée trop faible, la sensation de pilotage peut s’avérer trop
‘molle’. Le retour de manette au niveau des axes peut aussi dans ce cas paraître très
mou et lent. Si la composante P est au contraire réglée trop forte, cela peut provoquer
une oscillation rapide de l'axe concerné. Le retour de manette peut aussi entraîner des
oscillations résiduelles.
Intégral (composante I)
La composante I est ce que l’on appelle la composante de « Headholding ». Les
défauts de régulation sont ici additionnés et utilisés à des fins de contre-régulation. Il
s’agit de l’‘intelligence’ de la régulation. Si un modèle est écarté de sa trajectoire par
l’utilisation de composantes I, le modèle est automatiquement remis sur sa trajectoire.
Les facteurs P et D effectuent une régulation active contre ce dérapage. Si le modèle
sort tout de même de la position d’équilibre, il se stabilise dans la nouvelle position. La
régulation I réagit relativement lentement.
Sensibilité
Si la composante I est réglée trop faible, l’assiette du modèle est mal maintenue. Avec
des gouvernes centrées ou par des influences du vent, le modèle peut être amené à
dériver. Si la composante I est réglée trop forte, cela peut provoquer une oscillation
lente de l'axe concerné. Lors du retour de manette, un comportement anormal est par
ailleurs visible.
Taille d’intégrateur (maximale)
La taille maximale de l’intégrateur indique combien d’‘erreurs’ le régulateur peut
appréhender. Si le vent fait dévier le modèle du cap souhaité, celui-ci indique de
combien le modèle peut être redirigé vers le cap initial.

Seite 18/39
!
Un intégrateur important assure une régulation très stable car beaucoup de sources
d’erreurs peuvent être reconnues et corrigées. En vol acrobatique, un intégrateur trop
important peut entraîner des problèmes lors de figures avec des décrochages car
l’intégrateur peut recevoir des informations, mais ne peut pas piloter. Dès que l’action
des gouvernes est à nouveau restaurée, la valeur d’erreur enregistrée dans l’intégrateur
est traitée. Ceci peut entraîner une erreur de reprise du cap ou entraîner une poursuite
de la rotation du modèle.
Si l’intégrateur est réglé trop faible, le régulateur I n’a presque pas d’influence sur le
résultat de la régulation. Dans certains cas, le cap ne peut pas non plus être maintenu.
Retour
Dans la régulation I, il s’agit d’un retour automatique d’une gouverne dans sa position
neutre. Des valeurs élevées entraînent un retour rapide, si l’affaiblissement est réglé sur
« 0 », il n’y a pas de retour de la gouverne, l’axe est maintenant en mode Heading Hold.
Le paramètre d’affaiblissement permet également de régler en continu l’effet Heading
Hold. Un Heading Hold élevé assure une régulation d’assiette extrêmement stable. Les
influences du vent et les gouvernes compensées sont supprimées.
Conseil : Pour qui souhaite un vol tranche stable en phase de gyroscope 3, il est
nécessaire de mettre le retour de gouverne de direction sur « 0 », mais pour cela la
commander en continue de manière active.
En vol acrobatique (déclenchés, vrilles), le Heading Hold peut engendrer des réglages
impropres si la composante I et l’intégrateur sont trop importants. Cet effet survient dès
le décrochage du modèle. La régulation tente de compenser le décrochage, mais le
renforce et surréagit. Si l’on souhaite effectuer ces figures, l’intégrateur doit être laissé à
une valeur réduite. Le retour doit aussi être programmé plus fort.
Le retour peut aussi être dirigé en fonction de la commande. Dès qu’il y a pilotage,
l’effet Heading Hold est ainsi affaibli au jugé. Cela présente des avantages pour les
modèles critiques (mous) et en voltige aérienne lors de figures proches du décrochage.
Il est souvent conseillé, lors du retour par mouvement de manette, de temporiser un
peu, parce que la phase de retour de manette peut également profiter du retour (pour
des modèles/servos plus lents). D’un autre côté, il est conseillé de revenir ensuite
rapidement en mode Heading Hold pour atteindre une stabilité maximale. Si le retour de
manette n’a donc pas l’air propre, la temporisation doit être réduite. Si après le retour
de manette le modèle se détourne de sa trajectoire et y reste, la temporisation est trop
longue - la valeur doit être agrandie.
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117





















































































































MULTIPLEX Erweitert Wingstabi Le manuel du propriétaire
- Catégorie
- Jouets télécommandés
- Taper
- Le manuel du propriétaire
- Ce manuel convient également à
dans d''autres langues
Documents connexes
-
MULTIPLEX WINGSTABI-RX-9-DR M-LINK Le manuel du propriétaire
-
-
-
-
-
-
-
-
-