La page est en cours de chargement...

No.
8067
Piezo Gyro G 400
No.
8067
16 17
Attention: Nouveau principe de fonctionnement, lire impérativement le mode d’emploi
avant de mettre l’appareil en service.
1. Préface
Le gyroscope piézo G 400 est un système gyroscopique révolutionnaire de précision pour
le pilotage de modèles réduits d’avions, de planeurs et d’hélicoptères avec capteur piézo.
Ce gyroscope piézo moderne dispose de deux modes de service différents:
Mode normal
Avec ce mode, la stabilisation intervient sur un axe (par exemple le rotor arrière), comme
pour les gyroscopes communs. Lorsque le modèle est tiré de son assiette de vol par des
incidences externes telles que le vent, une modification rapide du régime ou des change-
ments de pas, le capteur piézo mesure cette valeur, la transforme en signal et la commu-
nique au servo du rotor arrière comme valeur correctrice, afin de compenser la différence
apparue;
Mode tenue de cap
Tenue de cap signifie tenue de cap. Dans ce mode, le gyroscope piézo G 400 travaille
initialement comme un gyroscope normal, en plus toutefois, il „repère“ son assiette actu-
elle. Lorsque le modèle est tiré de son assiette de vol au niveau de l’axe dont se charge le
gyroscope, par des incidences externes telles que le vent, etc., l’électronique totalise ces
écarts et ramène le modèle à son assiette initiale. Cet instruction de retour à l’assiette
initiale est exécutée si rapidement qu’elle n’est pra-
tiquement pas assimilée par le pilote. Le modèle
semble „cloué“ à sa position, qu’il se trouve de tra-
vers par rapport au vent, face à lui ou avec vent
arrière, le gyroscope piézo G 400 s’efforce, quelles
que soient les circonstances de conserver la positi-
on.
À noter
Pour atteindre sa puissance maximale, il faut que le
gyroscope piézo G 400 soit associé à un servo extrê-
mement rapide pour le rotor arrière. Il est naturelle-
ment possible de l’exploiter également avec des ser-
vos à vitesse de positionnement normale. Toutefois
les effets de stabilisation ne seront alors pas aussi
rapides qu’avec un servo super rapide.
Servos recommandés
Alimenté par 4,8 volts (4 éléments Cd-Ni, Ni-MH):
servo S 9253 réf. F 1278
Alimenté par 6 volts (5 éléments Cd-Ni, Ni-MH):
servo S 9254 réf. F 1266
Servos pour petits hélicoptères électriques:
S 3101, réf. F 1258 ou FS 500 Micro BB, réf. 8460.
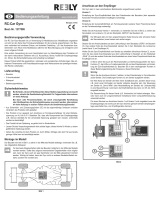
3D
GYRO
Ready Rev Gain
Servo
Aux
Rx
Piezo Gyro with
Headling Hold
No. 8065
Made in Germany
1
2
3
4
5
6
7
8
Receiver
35 MHz
Ready Rev Gain
Servo
Aux
Rx
G-400
Normal and Heading Hold
Piezo-Gyro
No. 8067
voie 4
schéma 1
Piezo Gyro G 400
5. General information
5.1 Model requirements
The high sensitivity of the gyro, the powerful response of the tail rotor and the high speed
with which the tail rotor reacts combine to place much higher loads than usual on the tail
of the model helicopter. This in turn requires a torsionally rigid tail rotor drive system and
a strong tail rotor gearbox. We recommend rigid drive systems, as they are better able to
absorb the forces exerted by the rapid changes in load. The mechanical linkage to the tail
rotor must also be as free-moving and direct (minimum slop) as possible.
5.2 Temperature adjustment
Although the gyro system is temperature-compensated as far as possible using the cur-
rently available solutions, it is still necessary for the gyro to be allowed to adjust itself to
the ambient temperature. For best results we recommend that you leave the gyro switched
on for about 5 minutes at the start of a flying session so that it can adjust to the surroun-
ding temperature. After this period switch the system off and then on again.
5.3 Supplementary notes
· If you are using an RC system with flight mode dependent ATV, e.g. an FC 28, you can
set tail rotor servo travel (ATV) and gyro gain separately for each flight mode, and these
settings can then be called up automatically when you operate the flight mode swit-
ches „Idle-Up 1“ and „Idle-Up 2“.
· Depending on the combination of main and tail rotor you are using, you may find that
the tail boom oscillates (swings from side to side) slightly in Normal mode. This may be
due to an excessively high gyro gain setting, but it can also be the result of tail rotor
blades which are too long or too wide. In this case the solution is to shorten the tail
rotor blades by about 3 - 5 mm.
· When the gyro is switched on it detects and stores the configuration of the tail rotor
and Aux channels and the position of the REV switch. If you ever need to connect the
„Aux“ and „Rx“ plugs to different receiver sockets, or if you use the reverse function, it
is then necessary to switch the gyro off and on again so that it can read in the new con-
figuration and store it.
6. Specification:
Operating voltage: 3 - 8 Volts, from receiver battery
Current drain: approx. 25 mA (at 4.8 V)
Dimensions: approx. 41 x 41 x 20 mm
Weight: approx. 30 g
7. Contents of set
1 x Piezo Gyro G 400
2 x 2 self-adhesive strips of damping foam
1 x operating instructions
robbe Modellsport GmbH & Co. KG
We reserve the right to alter technical specifications
voie 5

No.
8067
Piezo Gyro G 400
Piezo Gyro G 400
No.
8067
18 19
2. Notice abrégée pour les pilotes très pressés avant la première mise en service
· réaliser le raccordement selon les indications du schéma 1
· mettre l’émetteur en marche
· mettre le récepteur en marche
· ne pas déplacer le modèle ni le gyroscope piézo G 400 pendant approx. 10 secon-
des, le gyroscope piézo G 400 réalise un calibrage à zéro
· calibrage achevé -> le servo du rotor arrière se déplace en position initiale et la LED
rouge “Ready“ du gyroscope piézo G 400 s’allume
· amener le curseur de la voie 5 en fin de course
· amener le manche du rotor arrière dans une de ses fins de course et le relâcher
· lorsque le servo revient à sa position initiale -> mode normal
· lorsque le servo demeure dans sa position -> mode tenue de cap
· le curseur 5 fait office de „commutateur“ entre les deux modes et simultanément de
dispositif de réglage de la sensibilité.
en position médiane: 0%
en fin de course I. direction: 0% - 100% mode „normal“
en fin de course II. direction: 0% - 100% mode „tenue de cap“
LINEAR
100 %
0 %
100 %
Normal Modus
Heading Hold Modus
I
II
schéma 2
3. Mise en place
Important: tous les systèmes gyroscopiques à capteur piézo sont très sensibles aux
vibrations. Aucun gyroscope piézo ne donnera de bons résultats dans un modèle dont les
charges vibratoires sont élevées. Si nécessaire, tester également son implantation avec
d’autres types de mousse plastique. De bons résultats ont également été obtenus avec le
double face de 3,2 mm d’épaisseur de la Sté 3M (robbe réf. 5014). Nous vous prions donc
instamment d’accorder un attention très particulière à ce point.
Coller un morceau de mousse plastique autocollante fournie avec l’appareil sur le fond du
carter du gyroscope. Disposer ensuite le carter à un endroit à faibles vibrations dans le
modèle (dans le modèle par ex. dans la coupole sous le servo de pas). Installer le gyros-
cope de sorte que l’axe qu’il est susceptible de stabiliser le traverse verticalement ( cf.
schéma 3). La position d’implantation n’est pas critique, qu’elle soit proche de l’arbre du
rotor ou de la superstructure avant qui porte les servos, cela n’a guère d’importance, par
contre il est essentiel que le gyroscope soit protégé des vibrations.
R
e
a
d
y
R
e
v
G
a
in
S
e
r
v
o
Au
x
Rx
G
Y
R
O
R
e
a
d
y
R
e
v
G
a
i
n
S
e
r
v
o
A
u
x
R
x
G
YR
O
R
e
a
d
y
R
e
v
G
a
i
n
S
e
r
v
o
A
u
x
R
x
G
Y
R
O
Stabilisation de l’axe vertical
Stabilisation de l’axe de lacet
Stabilisation de l’axe transversal
schéma 3
mode normal
mode tenue de cap

No.
8067
Piezo Gyro G 400
Piezo Gyro G 400
No.
8067
20 21
4. Branchement et mise en service
À noter: dès que la voie „Aux” est raccordée, le variateur „Gain” est hors fonction.
4.1. Branchement du gyroscope piézo G 400 en „ mode normal“ avec réglage de la
sensibilité à partir de l’émetteur
Stabilisation du rotor arrière comme pour les autres systèmes gyroscopique piézo actuels.
Ce mode est adapté au vol normal et pour l’entraînement des figures de voltige.
Contrairement au mode tenue de cap décrit ultérieurement, la flèche du modèle se tour-
nera systématiquement dans le vent sous l’effet de girouette.
Important
· le gyroscope piézo G 400 détecte et corrige les moindres écarts de telle sorte qu’il n’e-
xige pas de mixage de soutien pas -> rotor arrière (Revo-Mix), nous recommandons de
couper ce mixage.
· pour piloter des pirouettes rapides, avec les systèmes gyroscopiques communs leur
sensibilité était discriminée (mixage Gyro-Sens). Ceci n’est plus nécessaire avec le
gyroscope piézo G 400, car avec lui, le signal du capteur est simplement surmodulé
par le manche. L’importance de cette surmodulation est déterminée par le réglage de
la réduction de la course du servo (ATV). Voilà pourquoi il faut absolument couper le
mixage de discrimination (Gyro-Sens).
· il faut également couper toutes les autres fonctions de mixage qui présentent un effet
sur le rotor arrière (par ex. mixage plateau cyclique -> rotor arrière)
Comme indiqué sur le schéma 1, installer le gyroscope piézo G 400 entre le servo de rotor
arrière et le récepteur et raccorder le connecteur „AUX“ à une voie à curseur libre (voie 5).
· mettre l’émetteur en marche
· mettre le récepteur en marche
· ne pas bouger le modèle ni le gyroscope piézo G 400 pendant approx. 10 secondes,
le gyroscope piézo G 400 effectue son étalonnage à zéro
· calibrage achevé -> le servo de rotor arrière se déplace en position initiale et la LED
rouge du gyroscope piézo G 400 s’allume
· si le modèle a malgré tout bougé pour une raison ou pour une autre ou lorsque la LED
clignote, il faut refaire une initialisation en coupant l’alimentation du récepteur puis en
la rétablissant
· amener le curseur de la voie 5 en fin de course
· amener le manche du rotor arrière dans une de ses fins de course et le relâcher
· lorsque le servo revient à sa position initiale -> mode normal
· si le servo reste en place, cela signifie que le gyroscope se trouve en mode tenue de
cap, amener le curseur 5 en fin de course dans la position opposée
· disposer le trim du rotor arrière en position médiane
· disposer le manche du servo mécaniquement de manière à ce qu’il présente un angle
de 90° pratiquement par rapport à la tringle
· accrocher la tringle au mécanisme du rotor arrière dans le trou le plus à l’extérieur
· disposer le manche du rotor arrière en position de débattement maximum
· accrocher la tringle au guignol du servo de manière à obtenir la course la plus longue
sans butée mécanique contre le rotor arrière
· contrôle du sens de rotation des servos: déplacer le manche de commande du rotor
arrière vers la droite l’arête avant des pales du rotor arrière va vers la gauche? Si ce
n’est pas le cas, inverser la course du servo au niveau de l’émetteur
· contrôle de la direction de l’effet du gyroscope (commutateur REV) : déplacer la flèche
vers la droite, l’arête avant des pales du rotor arrière va vers la gauche? Si ce n’est
pas le cas, commuter le commutateur „REV“ sur le gyroscope piézo G 400. À noter :
la commutation ne devient efficace qu’après avoir coupé puis rétabli le gyroscope
Il est dès lors possible avec le curseur 5, à partir de l’émetteur, de régler la sensibilité pro-
gressivement de 0 - 100 %.
À noter: contrairement à ce qui se passait pour les systèmes gyroscopiques communs
jusqu’à présent, avec le gyroscope piézo G 400 la course du servo est aussi réduite avec
la sensibilité du gyroscope, car, lorsque la sensibilité du gyroscope est réduite il suffit
d’une plus petite course du rotor arrière bien que la capacité d’exécution des instructions
reste la même. Par ailleurs, le gyroscope dispose d’une caractéristique de pilotage expo-
nentielle. Un réglage inférieur à 30 % n’est pas approprié à la pratique et ne doit pas être
programmé car la course de pilotage du rotor arrière est considérablement réduite.
Pour se familiariser avec le gyroscope lors du premier vol, nous recommandons les
réglages initiaux suivants:
· réglage de la course du servo du rotor arrière (ATV) : approx. 70 %
· sensibilité du gyroscope (ATV): approx. 70 %
4.2. Branchement du gyroscope piézo G 400 en „mode tenue de cap“ avec réglage
de la sensibilité au niveau de l’émetteur
Comme décrit précédemment la position de la flèche est parfaitement maintenue. Ce nou-
veau mode offre les avantages suivants:
· le débutant a dès lors la possibilité de se concentrer exclusivement sur les autres fon-
ctions de base de l’hélicoptère, étant donné que l’arrière conserve systématique la
position dans laquelle il a été programmé.
· pour les exercices pratiqués avec vent de travers, il n’est plus nécessaire de rectifier
systématiquement au niveau du rotor arrière. Le modèle vole sans effet girouette.
C’est-à-dire que la flèche ne se tourne pas dans le vent. Pour „voler sur une trajectoire
rectiligne“ il faut toutefois maintenant disposer l’hélicoptère dans la position souhaitée
avec de légères corrections du manche de pilotage.
· idéal pour le vol 3D et le vol dos qui prennent de plus en plus d’importance, il n’est pas
nécessaire de rectifier au niveau du rotor arrière. La direction sélectionnée est préser-
vée.
Important:
· le gyroscope piézo G 400 détecte et corrige les moindres écarts de telle sorte qu’il n’e-
xige pas de mixage de soutien pas -> rotor arrière (Revo-Mix), nous recommandons
de couper ce mixage.
· pour piloter des pirouettes rapides, avec les systèmes gyroscopiques communs leur
sensibilité était discriminée (mixage Gyro-Sens). Ceci n’est plus nécessaire avec le
gyroscope piézo G 400, car avec lui, le signal du capteur est simplement surmodulé
par le manche. L’importance de cette surmodulation est déterminée par le réglage de
la réduction de la course du servo (ATV). Voilà pourquoi il faut absolument couper le
mixage de discrimination (Gyro-Sens).
· il faut également couper toutes les autres fonctions de mixage qui présentent un effet
sur le rotor arrière (par ex. mixage plateau cyclique -> rotor arrière).

No.
8067
Piezo Gyro G 400
Piezo Gyro G 400
No.
8067
22 23
Pour la mise en service procéder comme indiqué sous 4.1.
· activer le mode „tenue de cap“ (voie à curseur 5 en butée)
· attention au rotor arrière, il se déplace dans un sens ou dans l’autre en fonction de l’im-
pulsion neutre de l’ensemble de radiocommande
· compenser au niveau du trim jusqu’à ce que le rotor arrière ou le servo s’immobilise
(Un conseil : si nécessaire, réduire électroniquement le trim (par ex. TRIM RATE 30 - 40
%) pour permettre un ajustement plus précis
· activer le mode „normal“
· amener le modèle en vol stationnaire, le nez dans le vent
· lorsque le modèle se déplace autour de son axe vertical, en vol stationnaire, atterrir et
corriger au niveau de la tringle du rotor arrière - pas au niveau du trim
· si nécessaire, reprendre plusieurs fois cette procédure
· lorsque le modèle cesse de se dégager de son axe vertical, l’ajustement électronique
et l’ajustement mécanique du modèle sont parfaitement adaptés.
Maintenant, il est possible d’effectuer un vol circulaire en mode „normal“ ou en mode
„tenue de cap“. Tous les autres réglages comme la sensibilité maximale du gyroscope et
le réglage de la course du servo du rotor arrière (ATV) pour la vitesse de rotation doivent
être déterminé par l’expérience accumulée en volant !
· Il est dès lors possible avec le curseur 5, à partir de l’émetteur, de régler la sensibilité
progressivement de 0 - 100 %.
À noter: Contrairement à ce qui se passait pour les systèmes gyroscopiques communs
jusqu’à présent, avec le gyroscope piézo G 400 la course du servo est aussi réduite avec
la sensibilité du gyroscope. Étant donné que le gyroscope dispose d’une caractéristique
de pilotage exponentielle, la réduction de la course est à peine repérable entre approx. 30
à 100 %. Un réglage inférieur à 30 % n’est pas approprié à la pratique et ne doit pas être
programmé car la course de pilotage du rotor arrière est considérablement réduite.
4.3. Raccordement du gyroscope piézo G 400 en „mode normal“ avec réglage manu-
el de la sensibilité sur le gyroscope.
Sur les ensembles de radiocommande disposant de peu de voies, il ne reste souvent pas
de voie disponible pour le réglage de la sensibilité du gyroscope. Dans ce cas, ne pas rac-
corder le connecteur „Aux“ du gyroscope. Il est alors possible de régler sur le gyroscope
la sensibilité progressivement de 0 - 100 %, la sensibilité augmentant si on tourne dans le
sens des aiguilles d’une montre et diminuant dans le sens opposé.
À noter: Contrairement à ce qui se passait pour les systèmes gyroscopiques communs
jusqu’à présent, avec le gyroscope piézo G 400 la course du servo est aussi réduite avec
la sensibilité du gyroscope, car, lorsque la sensibilité du gyroscope est réduite il suffit
d’une plus petite course du rotor arrière bien que la capacité d’exécution des instructions
reste la même. Par ailleurs, le gyroscope dispose d’une caractéristique de pilotage expo-
nentielle. Un réglage inférieur à 30 % n’est pas approprié à la pratique et ne doit pas être
programmé car la course de pilotage du rotor arrière est considérablement réduite.
Comme indiqué sur le schéma 1, installer le gyroscope piézo G 400 entre le servo du
rotor arrière et le récepteur. Dans cette variante, le connecteur de raccordement „Aux“
reste non affecté. Lorsque la voie complémentaire ne peut être raccordée par l’ensemble
de radiocommande, le gyroscope travaille alors automatiquement en mode standard.
Dans ce cas, il n’est pas possible d’activer le mode tenue de cap.
5. Généralités
5.1 Condition préalables imposées au modèles
Étant donné la haute sensibilité du gyroscope et la force et la rapidité de réaction du servo
de rotor arrière et donc la réaction proportionnelle du rotor arrière, les efforts imposés à la
flèche sont nettement supérieurs aux charges habituelles. Ceci exige un entraînement du
rotor arrière insensible aux efforts de torsion et un mécanisme de rotor arrière particulière-
ment solide. Une transmission rigide est de ce fait recommandée pour absorber les réac-
tions de transfert de charge très importantes. Par ailleurs, la tringle de liaison doit être abso-
lument absente de jeu et particulièrement souple.
5.2 Adaptation thermique
Bien que le système gyroscopique ait été pourvu d’un dispositif de compensation de la
température bénéficiant des recherches techniques les plus récentes, une adaptation
s’impose en présence de nuances de température entre la température du gyroscope et
la température ambiante. Voilà pourquoi il est recommandé de laisser le gyroscope sous
tension 5 minutes environ afin qu’il s’adapte à la température ambiante. Le couper ensuite
puis le remettre sous tension.
5.3 Autres remarques:
· sur les ensembles de radiocommande dont le réglage ATV est fonction de la phase de
vol, par exemple l’ensemble FC 28, il est possible, pour chaque phase de vol, de défi-
nir une course autonome du servo du rotor arrière (ATV) et un sensibilité particulière
également qu’il est possible de requérir automatiquement et simultanément à l’aide des
commutateurs de phase de vol „Idle-Up 1", „Idle-Up 2".
· en fonction de la combinaison rotor principal/rotor arrière, il peut se produire qu’en
mode normal la flèche oscille légèrement. Cette réaction n’est pas obligatoirement
causée par une sensibilité trop élevée, mais peut également être provoquée par des
pales de rotor arrière trop grandes ou dont la corde est trop importante. Dans ce cas,
raccourcir les pales du rotor arrière de 3 à 5 mm.
· la configuration des voies rotor arrière et „Aux”, de même que la position du commuta-
teur Rev (inversion de la course de servo) sont lues lorsque le gyroscope est mis en mar-
che puis sauvegardées. Si l’ordre d’affectation des voies ”Aux“ ou ”Rx“ est modifié sur
le récepteur ou si la fonction d’inversion est actionnée, il faut couper puis remettre le
gyroscope sous tension afin que la configuration soit saisie puis mise en mémoire.
6. Caractéristiques techniques:
tension de service: 3 à 8 volts fournis par l’accu du récepteur
consommation: approx. 25 mA (à 4,8V)
encombrement: approx. 41 x 41 x 20 mm
poids: approx. 30 g
7. Contenu du kit
1 x gyroscope piézo G 400
2 x 2 morceaux de mousse plastique autocollants d’amortissement
1 x mode d’emploi
Sous réserve de modification technique

BAAD
Irrtum und technische Änderungen vorbehalten
Copyright robbe-Modellsport 2003
Kopie und Nachdruck, auch auszugsweise, nur mit schriftlicher
Genehmigung der robbe-Modellsport GmbH & Co.KG
Errors and omissions excepted. Modifications reserved.
Copyright robbe-Modellsport 2003
Copying and re-printing, in whole or in part, only with prior written
approval of robbe-Modellsport GmbH & Co. KG
Sous réserve de d’erreur et de modification technique.
Copyright robbe-Modellsport 2003
Copie et reproduction, même d’extraits, interdites sans autorisation
écrite expresse de la Société robbe-Modellsport GmbH & Co. KG
robbe Modellsport GmbH & Co. KG
Metzloserstr. 36
Telefon: 06644 / 87-0
D 36355 Grebenhain
/