Nice Automation Run Le manuel du propriétaire
- Catégorie
- Ouvre-porte
- Taper
- Le manuel du propriétaire
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

4
Stop
Set
Close
Open
L1 L2 L3 L4 L5 L6 L7 L8
FLASHS.C.A
BLUEBUS
STOPP. P.OPENCLOSE
TX
24V 4W
S.C.A
MOFB
CLOSE
MOSE
LUCYB
OPEN
RX
NC NO CC NO NC
17
15 16
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

1
FR
FRANÇAIS
Sommaire
IMAGES ................................................ 2 - 6
Chapitre 1 - RECOMMANDATIONS ET PRÉCAUTIONS GÉNÉRALES
1.1 - Recommandations pour la sécurité ............................1
1.2 - Recommandations pour l’installation ...........................1
1.3 - Recommandations pour l’utilisation ............................2
Chapitre 2 - DESCRIPTION DU PRODUIT ET DESTINATION
D’USAGE ...................................................2
Chapitre 3 - INSTALLATION
3.1 - Contrôles à effectuer avant l’installation .........................2
3.2 - Limites d’utilisation .........................................2
3.2.1 - Durabilité du produit .....................................3
3.3 - Travaux de préparation à l’installation ...........................3
3.4 - Installation de l’opérateur ....................................4
3.5 - Fixation des pattes avec n de course de proximité inductive .........4
3.6 - Débrayer et bloquer manuellement l’opérateur ....................4
Chapitre 4 - RACCORDEMENTS ÉLECTRIQUES ...................4
4.1 - Description des connexions électriques ........................ 4
Chapitre 5 - CONTRÔLES FINAUX ET MISE EN SERVICE
5.1 - Sélection de la direction .....................................5
5.2 - Raccordement de l’alimentation électrique .......................5
5.3 - Reconnaissance des dispositifs ...............................5
5.4 - Reconnaissance de la longueur du vantail .......................5
5.5 - Vérication du mouvement du portail ...........................6
5.6 - Connexion d’autres dispositifs ................................6
Chapitre 6 - ESSAI ET MISE EN SERVICE
6.1 - Essai ...................................................6
6.2 - Mise en service ...........................................6
MAINTENANCE DU PRODUIT ..................................6
MISE AU REBUT DU PRODUIT .................................6
Chapitre 7 - PROGRAMMATION
7.1 - Fonctions préprogrammées ..................................7
7.2 - Touches de programmation ..................................7
7.3 - Programmations ...........................................7
7.4 - Programmation du premier niveau (fonctions ON-OFF) ..............7
7.5 - Programmation du second niveau (paramètres réglables) ............8
Chapitre 8 - INFORMATIONS COMPLÉMENTAIRES
8.1 - Ajout ou enlèvement de dispositifs .............................9
8.1.1 - Bluebus ..............................................9
8.1.2 - Entrée STOP ..........................................9
8.1.3 - Photocellules ..........................................9
8.1.4 - Photodétecteur FT210B .................................10
8.1.5 - RUN en mode «Esclave» ...............................10
8.1.6 - Reconnaissance d’autres dispositifs ........................10
8.1.7 - Récepteur radio .......................................11
8.1.8 - Branchement du programmateur Oview .....................11
8.1.9 - Branchement et pose de la batterie tampon ..................11
8.2 - Fonctions spéciales .......................................11
8.2.1 - Fonction «Ouvre toujours» ..............................11
8.2.2 - Fonction «Manœuvre dans tous les cas» ...................11
8.2.3 - Avis de maintenance ...................................11
8.2.4 - Vérication du nombre de manœuvres effectuées .............11
8.2.5 - Mise à zéro du compteur des manœuvres ...................11
Chapitre 9 - QUE FAIRE SI... (Guide de dépannage) ...............12
9.1 - Diagnostic ..............................................12
9.2 - Résolution des problèmes ..................................12
9.3 - Liste historique des anomalies ...............................12
9.4 - Signalisations par clignotant .................................13
9.5 - Signalisations de la logique de commande ......................13
CARACTÉRISTIQUES TECHNIQUES DU PRODUIT ................15
Manuel d’utilisation (annexe détachable) .......................... III
Déclaration de conformité ...................................IX
1
RECOMMANDATIONS ET PRÉCAUTIONS
GÉNÉRALES
1.1 - Recommandations pour la sécurité
•ATTENTION!–Leprésentmanuelcontientd’importantesinstruc-
tions et recommandations en matière de sécurité. Une mauvaise ins-
tallation peut provoquer de lourdes blessures. Avant de commencer
le travail, lire attentivement toutes les parties du manuel. En cas de
doutes, interrompre l’installation et demander des précisions au ser-
vice après-vente Nice.
•ATTENTION!-Consignesimportantes:conservezcemanuelenlieu
sûrandepouvoirleconsulterlorsdesinterventionsd'entretienou
de mise au rebut du produit.
Avertissements particuliers sur l’appropriation à l’utilisation de ce produit par
rapport à la Directive «Machines» 98/37/CE (2006/42/CE):
• Ce produit est mis sur le marché comme «composant de machine» et est
donc construit pour être incorporé dans une machine ou pour être assemblé
avec d’autres appareillages an de réaliser «une machine» selon les termes
de la Directive 2006/42/CE seulement en association avec les autres com-
posants et dans les modes décrits dans ce manuel d’instructions. Comme
le prévoit la directive 2006/42/CE nous rappelons que la mise en service de
ce produit n’est pas autorisée tant que le constructeur de la machine dans
laquelle ce produit est incorporé ne l’a pas identié et déclaré conforme à la
directive 2006/95/CE.
Avertissements particuliers sur l’appropriation à l’utilisation de ce produit par
rapport à la Directive «Basse Tension» 73/23/CEE et 2006/95/CE :
• Ce produit respecte les normes imposées par la Directive Basse tension
lorsqu'il est utilisé dans des congurations prévues dans le présent manuel et
avec les articles composant le catalogue de Nice S.p.a. Ces conditions pour-
raient ne pas être garanties si le produit est utilisé dans des congurations
ou avec d'autres produits non prévus à cet effet. L'utilisation du produit dans
ces situations est interdite tant que l'installateur n'a pas vérié si celles-ci
sont conformes à la Directive.
Avertissements particuliers sur l’appropriation à l’utilisation de ce produit par
rapport à la Directive «Compatibilité électromagnétique» 2004/108/CE:
• Ce produit respecte les critères relatifs aux essais de compatibilité électroma-
gnétique dans les conditions d'utilisation les plus critiques, dans des con-
gurations prévues dans le présent manuel et avec les articles composant le
catalogue de Nice S.p.a. La compatibilité électromagnétique pourrait ne pas
être garantie si le produit est utilisé dans des congurations ou avec d'autres
produits non prévus à cet effet. L'utilisation du produit dans ces situations est
interdite tant que l'installateur n'a pas vérié si celles-ci sont conformes à la
Directive.
1.2 - Recommandations pour l’installation
• Avant de commencer l’installation, contrôler si le présent produit est adapté à
l'automatisation de votre portail (voir chapitre 3 et les «Caractéristiques tech-
niques du produit»). Dans le cas contraire, NE PAS procéder à l’installation.
• Toutes les opérations d’installation et de maintenance doivent être
effectuées avec l’automatisation débranchée. Si le dispositif de décon-
nexion n'est pas visible là où se trouve l'automatisme, avant le début des
travaux, il convient d'installer sur le dispositif une afche portant la mention :
«ATTENTION! MAINTENANCE EN COURS».
• Durant l’installation, manipuler avec soin le produit an d’éviter tout écra-
sement, choc, chute ou contact avec des liquides de toute nature. Ne pas
mettre le produit près de sources de chaleur, ni l’exposer à des ammes
libres. Toutes ces actions peuvent l’endommager et créer des dysfonctionne-
ments ou des situations de danger. Au cas où, interrompre immédiatement
l’installation et s’adresser au service après-vente Nice.
• Aucune modication du produit ne peut être effectuée. Des opérations non
autorisées ne peuvent que provoquer des problèmes de fonctionnement. Le
constructeur décline toute responsabilité pour les dommages dérivant de
modications arbitraires au produit.
• Si le portail à automatiser est équipé d’un vantail pour piétons, préparer l’ins-
tallation avec un système de contrôle qui désactive le fonctionnement du
moteur lorsque le vantail pour piétons est ouvert.
• Sur le réseau d’alimentation de l’installation, prévoir un disjoncteur (non four-
ni) ayant un écart d’ouverture entre les contacts qui garantisse la coupure
complète du courant électrique dans les conditions prévues pour la catégorie
de surtension III.
• ATTENTION!-Ilestformellementinterditd’alimenterlemoteuravant
qu’il n’ait été complètement installé.
• Le sélecteur à clé doit être positionné à vue près de l’automatisme, loin des
parties en mouvement, à une hauteur minimale de 1,5m du sol et non acces-
sible au public. S’il est utilisé en mode «détecteur de présence», s’assurer
que personne ne se trouve à proximité de l’automatisme.
• Vérier qu’il n’y a pas de point d’encastrement ou d’écrasement près des
parties xes, quand le vantail du portail se trouve dans la position d’ouverture
et de fermeture maximale; le cas échéant, protéger ces parties.
• Le produit ne doit pas être considéré comme un système de protection
absolue contre l’intrusion. Si vous souhaitez vous protéger efcacement, il
est nécessaire d’ajouter d’autres dispositifs de sécurité à l’automatisme.
• Vérier s’il est nécessaire d’ajouter d’autres dispositifs pour compléter l’auto-
matisation en fonction du mode d’utilisation et des dangers environnants;

2
FR
par exemple tenir compte des risques d’impact, d’écrasement, de coupure,
d’entraînement, et autres dangers en général.
• Si des interrupteurs automatiques ou des fusibles se déclenchent, il faut éli-
miner la cause avant de les réarmer.
• L’automatisme ne peut être utilisé avant d’avoir procédé à la mise en service
tel qu’indiqué au chapitre «Essai et mise en service».
• Vérier fréquemment l’automatisme pour déceler d’éventuels déphasages,
signes d’usure ou d’endommagement des câbles électriques et des parties
mécaniques. Ne pas utiliser l’automatisme au cas où des réglages ou des
réparations s’avéreraient nécessaires.
• Si l’automatisme n’est pas utilisé pendant une longue période, il est préfé-
rable de retirer la batterie en option pour éviter tout risque de fuite de subs-
tances nocives et de la conserver dans un endroit sec.
• Les matériaux d'emballage du produit doivent être mis au rebut dans le plein
respect des normes locales en vigueur.
1.3 - Recommandations pour l’utilisation
• Le produit n’est pas destiné à être utilisé par des personnes (enfants com-
pris) dont les capacités physiques, sensorielles ou mentales sont réduites ou
manquant d’expérience ou de connaissance, à moins que celles-ci n’aient
pu bénécier, par l'intermédiaire d’une personne responsable de leur sécu-
rité, d’une surveillance ou d’instructions concernant l’utilisation du produit.
• Les enfants se trouvant à proximité de l’automatisme doivent être surveillés;
s'assurer qu’ils ne jouent pas avec ce dernier.
• Ne pas laisser les enfants jouer avec les dispositifs de commande xes. Main-
tenez les dispositifs de commande à distance hors de portée des enfants.
• Pour le nettoyage superciel du produit, utiliser un chiffon doux et légèrement
humide. N’utiliser que de l’eau; ne pas utiliser de détergents ou de solvants.
2
DESCRIPTION DU PRODUIT ET DESTINATION
D'USAGE
Ce produit a été conçu pour automatiser les portails coulissants à usage rési-
dentiel. ATTENTION!-Touteautreutilisationdifférentedecelledécrite
et dans des conditions ambiantes différentes de celles indiquées dans
cemanueldoitêtreconsidéréecommeimpropreetinterdite!
RUN est une gamme d'opérateurs électromécaniques non réversibles équi-
pés d'une logique de commande électronique et d'un connecteur de type
«SM» pour le récepteur des commandes radio (en option). Les branchements
électriques vers les dispositifs extérieurs sont simpliés grâce à l’utilisation de
«BlueBUS», une technique qui permet de connecter plusieurs dispositifs avec
2 ls seulement. La liste des dispositifs pouvant être raccordés au BlueBUS
de Run est présente dans le chapitre 7.3.1 «BlueBUS»; une liste actualisée
comportant les compatibilités correspondantes est également présente sur le
site www.niceforyou.com.
RUN dispose d'un connecteur pour l'unité de programmation à distance qui
permet une gestion complète et rapide de l'alimentation, de la maintenance
et des diagnostics en cas de dysfonctionnements éventuels; voir aussi 7.8.1
«Unité de programmation à distance».
S'il est alimenté par le secteur, Run peut abriter une batterie tampon qui, en cas
d'absence d'électricité (coupure de courant), permet à l'automatisme d'exécu-
ter certaines manœuvres au cours des heures suivantes, même en l'absence
d'alimentation électriques (voir paragraphe 7.8.2). En cas de coupure du cou-
rant électrique, il est quoi qu’il en soit possible de manœuvrer le vantail du
portail en débloquant l'opérateur à l’aide de la poignée prévue à cet effet (voir
paragraphe 3.6).
L’automatisme permet d’installer différents accessoires qui augmentent sa
fonctionnalité et en garantissent la sécurité.
La gamme RUN comporte les produits dont les principales différences sont
décrites dans le tableau 1 (voir g.1).
TABLEAU 1
comparaisondescaractéristiquesessentiellesdel'opérateurRUN
Opérateur de type RUN400HS RUN1200HS
Type de n de course électromécanique électromécanique
Longueur maximale du
vantail
14mt 14mt
Poids maximum du vantail 400kg 1200kg
Couple maximum au démar-
rage (force équivalente)
12,3 Nm
(340N)
28,4Nm
(790N)
Moteur 24V; 5500RPM 24V; 3100RPM
Note: 1kg = 9,81N donc, par exemple: 1390N = 142kg
3
INSTALLATION
3.1 - Contrôles à effectuer avant l’installation
Attention!-L’installationdeRUNdoitêtreeffectuéepardupersonnel
qualifié, dans le respect des lois, des normes et des règlements ainsi
que de toutes les instructions de ce manuel.
Avant de continuer l’installation de RUN, il faut effectuer les contrôles suivants:
• Vérifier que tout le matériel à utiliser est en excellent état, adapté à l’usage et
conforme aux normes.
• Vérifier que la structure du portail est adaptée pour être équipée d’un auto-
matisme.
• Vérifier que le poids et les dimensions du vantail rentrent dans les limites
d’utilisation indiquées au chapitre «3.2 Limites d’utilisation».
• Vérifier, en comparant avec les valeurs figurant dans le chapitre «Caractéris-
tiques techniques», que la force nécessaire pour mettre le vantail en mou-
vement est inférieure à la moitié du «Couple maximum» et que la force
nécessaire pour maintenir le vantail en mouvement est inférieure à la moitié
du «Couple nominal»; on conseille une marge de 50% sur les forces car les
conditions climatiques adverses peuvent faire augmenter les frictions.
• Vérifier que dans la course du portail, aussi bien en fermeture qu’en ouver-
ture, il n’y a pas de points présentant une plus grande friction.
• Vérifier que le vantail ne risque pas de dérailler et de sortir des rails de gui-
dage.
• Vérifier la robustesse des butées mécaniques de limitation de la course en
contrôlant qu’il n’y a pas de déformations même en cas de heurt violent du
vantail sur la butée.
• Vérifier que le vantail est bien équilibré, c’est-à-dire qu’il ne doit pas bouger
s’il est laissé arrêté dans une position quelconque.
• Vérifier que la zone de fixation de l’opérateur n’est pas sujette à inondation;
éventuellement, monter l’opérateur suffisamment soulevé par rapport au sol.
• Vérifier que la zone de fixation de l’opérateur permet la manœuvre de
débrayage de manière facile et sûre.
• Vérifier que les points de fixation des différents dispositifs se trouvent dans
des endroits à l’abri des chocs et que les surfaces sont suffisamment solides.
• Éviter que les parties de l’automatisme puissent être immergées dans l’eau
ou dans d’autres substances liquides.
• Ne pas placer le RUN à proximité de flammes ou de sources de chaleur,
dans des atmosphères potentiellement explosives, particulièrement acides
ou salines; cela pourrait endommager le RUN et causer des problèmes de
fonctionnement ou des situations de danger.
• Si le portail coulissant est muni d’un portillon pour le passage de piétons
incorporé ou dans la zone de manœuvre du vantail, il faut s’assurer que ce
portillon ne gêne pas la course normale et prévoir éventuellement un système
d’interverrouillage.
• Connecter la logique de commande à une ligne d’alimentation électrique
avec mise à la terre.
• Raccorder le portail à la terre tel que prévu par la réglementation en vigueur.
• Il est nécessaire de prévoir, sur la ligne d’alimentation électrique, un dispositif
qui fasse disjoncter complètement l’automatisme du réseau électrique. Le
dispositif de disjonction doit avoir un écart d’ouverture entre les contacts
qui entraîne une coupure totale de l’électricité, dans les conditions prescrites
pour la catégorie de surtension III, conformément aux règles d’installation.
En cas de nécessité, ce dispositif garantit une coupure rapide et sûre de
l’alimentation électrique; par conséquent il doit être installé à vue près de
l’automatisme. Par contre, s’il est placé de façon non visible, il doit être muni
d’un système qui empêche une éventuelle reconnexion accidentelle ou non
autorisée de l’alimentation électrique, afin d’éviter tout danger. Le dispositif
de coupure du courant n’est pas fourni avec le produit.
3.2 - Limites d’utilisation
Les données relatives aux performances de la gamme RUN figurent dans le
chapitre «Caractéristiques techniques» et sont les seules valeurs qui per-
mettent d’évaluer correctement si l’opérateur est adapté à l’application.
Les caractéristiques structurales des produits RUN permettent de les utiliser
sur des portails coulissants, dans les limites indiquées dans les tableaux 2 et 3.
Le fait que RUN soit réellement adapté à l'automatisation d'un portail coulis-
sant donné dépend des frictions et d’autres phénomènes, qui peuvent être
occasionnels, comme la présence de glace qui pourrait bloquer le mouvement
du portail.
Pour une vérification réelle, il est absolument indispensable de mesurer la
force nécessaire pour manœuvrer le vantail sur toute sa course et contrôler
que la force ne dépasse pas la moitié du «couple nominal» indiqué au cha-
pitre «Caractéristiques techniques» (nous conseillons une marge de 50% car
des conditions climatiques critiques peuvent faire augmenter les frictions); par
ailleurs, pour établir le nombre de cycles/heure, les cycles consécutifs et la
vitesse maximum autorisée, il faut considérer les données des tableaux 1 et 2.

3
FR
TABLEAU 2 - Limites suivant la longueur du vantail
RUN400HS RUN1200HS
Longueur
du vantail
(m)
cycles/
heure maxi-
mum
cycles
consécutifs
maximum
cycles/
heure maxi-
mum
cycles
consécutifs
maximum
Jusqu’à 4 67 33 36 21
4 ÷ 6 45 26 26 15
6 ÷ 8 37 21 23 12
8 ÷ 10 29 18 17 10
10 ÷ 12 25 15 14 8
12 ÷ 14 22 13 13 7
TABLEAU 3 - Limites suivant le poids du vantail
RUN400HS RUN1200HS
Poids du vantail en
(kg)
Pourcentage cycles Pourcentage cycles
50 ÷ 100 100% 100%
100 ÷ 200 50 80
200 ÷ 400 30 75
400 ÷ 550 --- 60
550 ÷ 800 --- 50
800 ÷ 1000 --- 40
1000 ÷1200 --- 30
3.2.1 - Durabilité du produit
La durabilité est la vie économique moyenne du produit. La valeur de la durabi-
lité est fortement inuencée par l’indice de charge de travail des manœuvres:
c’est-à-dire la somme de tous les facteurs qui contribuent à l’usure du produit,
voir Tableau 4.
Pour calculer la durabilité de votre automatisme procéder de la façon suivante:
01. Additionner les valeurs des rubriques du Tableau 4 relatives aux condi-
tions présentes dans l’installation;
02. Dans le Graphique 1 à partir de la valeur qui vient d’être identiée, tracer
une ligne verticale jusqu’à l’intersection avec la courbe; depuis ce point,
tracer une ligne horizontale jusqu’à l’intersection de la ligne des «cycles de
manœuvres». La valeur déterminée est la durabilité estimée de votre produit.
Les valeurs de durabilité indiquées dans le graphique ne s’obtiennent que si
le plan de maintenance est rigoureusement respecté, voir chapitre «Plan de
maintenance». L’estimation de durabilité est effectuée sur la base des calculs
de projet et des résultats d’essais effectués sur les prototypes. Par consé-
quent, s’agissant d’une estimation, elle ne constitue en aucun cas une garantie
de la durée effective du produit.
Exemple de calcul de durabilité pour RUN400HS: automatisation d’un portail
avec vantail de 10m de long et pesant 150kg, placé, par exemple, près de la mer:
Le Tableau 4 permet d’obtenir les «indices de charge de travail» pour ce type d’installa-
tion: 15% («Longueur du vantail»), 30% («Poids du vantail») et 10% («Température
ambiante supérieure à 40°C ou inférieure à 0°C ou humidité supérieure à 80%»).
Ces indices doivent être additionnés entre eux pour obtenir l’indice de charge de tra-
vail totale qui, dans ce cas, est de 55%. Avec le paramètre calculé (55%), relever sur
le Graphique 1, sur l’axe horizontal (indice de charge de travail), la valeur correspon-
dante des «cycles de manœuvres» que notre produit pourra effectuer durant sa vie =
180000cycles environ.
TABLEAU 4 - Estimation de la durabilité en fonction de
l'indicedechargedetravaildelamanœuvre
Indice de charge de travail Run
400HS 1200HS
Longueur du vantail en mètres
Jusqu’à 6 5% 5%
6 ÷ 9 10% 10%
9 ÷ 12 15% 15%
12 ÷ 14 20% 20%
Poids du vantail en kg
50÷100 10% 5%
100 ÷ 200 30% 10%
200 ÷ 400 60% 20%
400 ÷ 550 - 30%
550 ÷ 800 - 40%
800 ÷ 100 - 50%
100 ÷ 1200 - 60%
Autres éléments sources de fatigue (à
prendre en compte si la probabilité qu'ils
se produisent est supérieure à 10%)
Température ambiante supérieure à
40°C ou inférieure à 0°C ou humidité
supérieure à 80%
10% 10%
Présence de poussière ou de sable 15% 15%
Présence de salinité 20% 20%
Interruption de manœuvre par photocellule 10% 10%
Interruption de manœuvre par Halte 20% 20%
Démarrage actif 10% 10%
Indicedechargedetravailen%:
GRAPHIQUE 1
Indice de charge de travail (%)
Durabilité en cycles
0
50.000
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
100.000
150.000
200.000
250.000
300.000
350.000
400.000
450.000
500.000
3.3 - Travaux de préparation à l’installation
La g.2 montre un exemple d’installation d’automatisation réalisée avec des
composants Nice :
1 Sélecteur à clé
2 Récepteur FT210B
3 Photocellules
4 Émetteur FT210B
5 Bord primaire mobile
6 Patte de n de course «Ouvert»
7 Crémaillère
8 Clignotant avec antenne intégrée
9 RUN
10 Patte de n de course «Fermé»
11 Bord secondaire mobile (option)
12 Émetteur radio
Ces composants sont positionnés selon un schéma typique et commun. En
se référant à la g.2, établir la position approximative dans laquelle chaque
composant prévu sera installé. Important – Avant de procéder à l’installa-
tion, préparer les câbles électriques nécessaires en se référant à la g.2 et
au «Tableau 5 - Caractéristiques techniques des câbles électriques».
Attention – Durant la pose des gaines pour le passage des câbles électriques,
tenir compte du fait qu’à cause d’éventuels dépôts d’eau dans les boîtes de déri-
vation, les gaines de raccordement peuvent créer des phénomènes de condensa-
tion à l’intérieur de la logique qui risquent d’endommager les circuits électroniques.

4
FR
TABLEAU 5 - Caractéristiquestechniquesdescâblesélectriques(g.2)
Connexion Type de câble Longueur maximale autorisée
A: Câble d'ALIMENTATION 1 câble 3 x 1,5mm
2
30m (note 1)
B: Câble de CLIGNOTANT avec antenne 1 câble 2 x 0,5mm
2
1 câble blindé type RG58
20m
20m (moins de 5m conseillé)
C: Câble de PHOTOCELLULE 1 câble 2 x 0,5mm
2
30m (note 2)
D: Câble SÉLECTEUR À CLÉ 2 câbles 2 x 0,5mm
2
(note 3) 50m
E: Câble de CONNEXION entre les 2bords mobiles 1 câble 3 x 0,5mm
2
(note 4) 20m
F: Câble de CONNEXION bords mobiles 1 câble 2 x 0,5mm
2
(note 5) 30m
Note 1 – si le câble d’alimentation dépasse 30m de long, il faut utiliser un câble de section supérieur (3 x 2,5mm
2
) et il est nécessaire d'installer une mise à la terre de sécurité à
proximité de l’automatisme.
Note 2 – Si le câble Bluebus dépasse 30m de long, et jusqu'à 50m, il faut utiliser un câble de section supérieure (2 x 1mm
2
).
Note 3 – Ces deux câbles peuvent être remplacés par un câble unique de 4 x 0,5mm
2
.
Note 4 – Ces câbles peuvent être remplacés par un câble unique de 5 x 1,5mm
2
.
Note 5 – pour la connexion des bords sensibles mobiles sur les parties coulissantes, il faut utiliser des dispositifs adaptés qui permettent la connexion même quand le vantail est en
mouvement; sur la gure, on voit que c'est le FT210B qui est utilisé.
ATTENTION!–Lescâblesutilisésdoiventêtreadaptésautyped’environnementoùesteffectuéel’installation.
3.4 - Installation de l’opérateur
AVERTISSEMENTS
• Une installation incorrecte peut causer de graves blessures aux per-
sonnes qui effectuent le travail et à celles qui utiliseront le produit.
• Avant de commencer l’assemblage de l’automatisme, effectuer les
contrôles préliminaires décrits aux paragraphes 3.1 et 3.2.
S'il y a déjà une surface d'appui, il faudra xer l'opérateur directement sur cette
surface par l'intermédiaire de dispositifs de xation adéquats tels que, par
exemple, des chevilles à expansion. Autrement, pour xer l'opérateur:
01. Creuser des fondations de dimensions adéquates en utilisant comme réfé-
rence les cotes indiquées à la g.3).
02. Installer une ou plusieurs gaines pour le passage des câbles électriques
(g.4).
03. Assembler les 4pattes de xation sur la plaque de fondation en plaçant un
écrou au-dessous et un écrou au-dessus de la plaque; visser l'écrou sous
la plaque (g.5) de manière à ce que la partie letée dépasse de la plaque
de 40mm maximum.
04. Effectuer la coulée de béton et, avant que le béton commence à prendre,
placer la plaque de fondation aux cotes indiquées sur la gure3; s'as-
surer qu'elle est bien parallèle au vantail et parfaitement à niveau, g.6.
Attendre la prise totale du béton.
05. Retirer les 4écrous supérieurs de la plaque puis y poser l'opérateur; véri-
er qu'il est parfaitement parallèle au vantail puis visser légèrement les
4écrous et rondelles fournis (g.7).
06. Débrayer l'opérateur tel qu'indiqué au paragraphe «3.6 - Débrayer et blo-
quer manuellement l'opérateur».
07. Ouvrir complètement le vantail, placer la première partie de la crémaillère
sur le pignon et s'assurer que le début de la crémaillère coïncide bien avec
le début du vantail (g.8). S'assurer qu'il y ait un jeu de 1÷2 mm entre le
pignon et la crémaillère, xer ensuite au moyen de dispositifs adéquats la
crémaillère au vantail.
08. Faire coulisser le vantail en utilisant toujours le pignon comme point de
repère pour xer les autres éléments de la crémaillère.
09. Couper l'excédent de crémaillère sur sa dernière partie.
10. Essayer de déplacer le vantail plusieurs fois en ouverture et en fermeture en
s'assurant que la crémaillère coulisse en étant alignée sur le pignon avec
un désalignement de 5mm au maximum et que, sur toute sa longueur, un
jeu de 1÷2mm entre pignon et crémaillère a bien été respecté (g.9).
11. Serrer à fond les écrous de xation de l'opérateur de manière à ce qu'il soit
solidement xé au sol; couvrir les écrous de xation à l'aide des bouchons
fournis (g.10).
12. Fixer les pattes de n de course tel que décrit ci-dessous (pour les versions
avec n de course inductive, xer les pattes tel que décrit au paragraphe
«3.5 Fixation des pattes de n de course dans les versions avec n de
course de proximité inductive»):
a) Mettre manuellement le vantail en position d'ouverture en laissant au
moins 2-3cm par rapport à la butée mécanique.
b) Faire coulisser la patte sur la crémaillère dans le sens de l'ouverture
jusqu'à l'intervention de la n de course. Ensuite, faire avancer la patte d'au
moins 2cm puis la bloquer sur la crémaillère avec les grains correspon-
dants (g.11).
c) Effectuer la même opération pour la n de course de fermeture.
13. Bloquer l'opérateur tel qu'indiqué dans le paragraphe Débrayage et mou-
vement manuel du chapitre «Instructions et recommandations destinées à
l’utilisateur de l’opérateur».
3.5 - Fixation des pattes avec fin de course de proximité inductive
Pour les versions qui utilisent la n de course de proximité inductive, il faut xer
les pattes de n de course tel que décrit ci-dessous.
01. Mettre manuellement le vantail en position d'ouverture en laissant au moins
2-3cm par rapport à la butée mécanique.
02. Faire coulisser la patte sur la crémaillère dans le sens de l'ouverture jusqu'à
ce que la LED correspondante s'éteigne, comme illustré sur la g.12.
Ensuite, faire avancer la patte d'au moins 2cm puis la bloquer sur la cré-
maillère avec les grains correspondants.
03. Mettre manuellement le vantail en position de fermeture en laissant au
moins 2-3cm par rapport à la butée mécanique.
04. Faire coulisser la patte sur la crémaillère dans le sens de la fermeture
jusqu'à ce que la LED correspondante s'éteigne. Ensuite, faire avancer
la patte d'au moins 2cm puis la bloquer sur la crémaillère avec les grains
correspondants.
Attention-Danslandecoursedeproximitéinductive,ladistancede
lapattedoitêtrecompriseentre3et8mm,commeindiquésurlag.
13
.
3.6 - Débrayer et bloquer manuellement l’opérateur
L’opérateur est muni d’un système de débrayage mécanique qui permet d’ou-
vrir et de fermer manuellement le portail.
Ces opérations manuelles doivent être effectuées en cas de coupure de cou-
rant électrique ou d’anomalies de fonctionnement ou lors des phases d’instal-
lation.
01. Faire glisser le disque couvrant la serrure (phase 1 - g.14);
02. Insérer et tourner la clé dans le sens horaire et tirer la poignée de débrayage
(phase 2 - g.14);
03. À ce stade, il est possible de déplacer manuellement le vantail dans la
position souhaitée (phase 3 et 4 - g.14).
4
RACCORDEMENTS ÉLECTRIQUES
ATTENTION!–Touslesbranchementsélectriquesdoiventêtreréalisés
après avoir coupé le courant électrique du réseau et s’il y a lieu, après
avoir débranché la batterie tampon.
01. Relier tous les câbles d’alimentation aux différents dispositifs, en laissant
20÷30cm de longueur en plus du nécessaire. Voir le Tableau 5 pour le
type de câbles et la Figure 17 pour les branchements.
02. Avec un collier de serrage, regrouper et lier tous les câbles qui entrent
dans l'opérateur, mettre le collier de serrage légèrement en dessous du
trou d’entrée de câbles.
03. Brancher le câble d’alimentation sur la borne tel qu’indiqué Figure 15, puis
avec un collier de serrage, xer le câble sur le première bague presse-
câbles.
04. Effectuer les connexions des autres câbles suivant le schéma de la gure
16. Pour plus de commodité, les bornes sont amovibles.
05. Une fois les branchements terminés, bloquer les câbles regroupés à l’aide
des bagues prévues à cet effet (Fig. 16), la partie en excès du câble d’an-
tenne doit être bloquée avec les autres câbles.
4.1 - Description des connexions électriques
• FLASH = sortie pour un ou de clignotants de type «LUCYB» ou similaires
avec l’ampoule 12V maximum 21W.
• S.C.A. = sortie «Voyant portail ouvert»; il est possible de connecter une
ampoule de signalisation 24V maximum 4W. Elle peut être programmée
aussi pour d’autres fonctions; voir paragraphe «7.5 Fonctions deuxième
niveau».

5
FR
• BLUEBUS = sur cette borne, on peut connecter les dispositifs compatibles;
ils sont tous connectés en parallèle avec seulement deux conducteurs sur
lesquels transitent aussi bien l’alimentation électrique que les signaux de
communication. D’autres informations sur BlueBUS se trouvent dans le para-
graphe «8.1.1 BlueBUS».
• STOP = entrée pour dispositifs qui bloquent ou éventuellement arrêtent la
manœuvre en cours; en adoptant certaines solutions sur l’entrée, il est pos-
sible de connecter des contacts type «Normalement Fermé», «Normale-
ment Ouvert» ou des dispositifs à résistance constante. D’autres informa-
tions sur STOP se trouvent dans le paragraphe «8.1.2 Entrée STOP».
• PP = entrée pour dispositifs qui commandent le mouvement en mode Pas à
Pas; on peut y connecter des contacts de type «Normalement Ouvert».
• OPEN = entrée pour dispositifs qui commandent le mouvement d’ouver-
ture uniquement; on peut y connecter des contacts de type «Normalement
Ouvert».
• CLOSE = entrée pour dispositifs qui commandent le mouvement de ferme-
ture uniquement; on peut y connecter des contacts de type «Normalement
Ouvert».
• ANTENNA = entrée pour la connexion de l’antenne pour récepteur radio
(l’antenne est incorporée sur LUCY B).
5
CONTRÔLES FINAUX ET MISE EN SERVICE
Avant de commencer la phase de contrôle et de mise en service de l’automa-
tisme, il est conseillé de mettre le portail à mi-course environ de manière qu’il
puisse se déplacer aussi bien en ouverture qu’en fermeture.
5.1 - Sélection de la direction
La direction de la manœuvre d’ouverture doit être choisie en fonction de la
position de l’opérateur par rapport au portail; si le portail doit coulisser vers la
gauche pour l’ouverture, il faut mettre le sélecteur vers la gauche comme dans
la figure,
si le portail doit coulisser vers la droite pour l’ouverture, il faut mettre le sélec-
teur vers la droite comme dans la figure
5.2 - Branchement au secteur
ATTENTION!–Le branchement de RUN au secteur doit être effectué
par du personnel expert et qualifié en possession des caractéristiques
requises et dans le plein respect des lois, normes et réglementations.
Dès que l’opérateur RUN est alimenté, il est conseillé de faire quelques vérifi-
cations élémentaires:
01. Vérier que la LED BLUEBUS clignote régulièrement à la fréquence d’un
clignotement à la seconde.
02. Vérier que les LED sur les photocellules clignotent elles aussi (aussi bien
sur TX que sur RX); la fréquence de clignotement n’est pas signicative,
elle est liée à d’autres facteurs.
03. Vérier que le clignotant connecté à la sortie FLASH et que le voyant
connecté sur la sortie S.C.A. sont éteints.
Si tout cela ne se vérifie pas, il faut couper immédiatement l’alimentation de
la logique de commande et contrôler plus attentivement les connexions élec-
triques.
D’autres informations utiles pour la recherche et le diagnostic des pannes se
trouvent dans le chapitre «Résolution des problèmes».
5.3 - Reconnaissance des dispositifs
Après le branchement au secteur il faut faire reconnaître par la logique de com-
mande les dispositifs connectés aux entrées BLUEBUS et STOP. Avant cette
phase, les LED L1 et L2 clignotent pour indiquer qu’il faut effectuer la recon-
naissance des dispositifs.
01. Appuyer sur les touches [s] et [Set] sans relâcher.
Stop
Set
Close
Open
L1 L2 L3 L4 L5 L6 L7 L8
02. Relâcher les touches quand les LED L1 et L2 commencent à clignoter très
rapidement (au bout d’environ 3s).
03. Attendre quelques secondes que la logique termine la reconnaissance des
dispositifs.
04. À la fin de la reconnaissance, la LED STOP doit rester allumée, les LED L1
et L2 s’éteindront (les LED L3 et L4 commenceront à clignoter en dernier).
Reconnaissance des dispositifs en mode 2
Cela permet de configurer:
• La sortie Bluebus avec sortie auxiliaire à 12V; elle peut être utilisée comme
sortie pour alimenter des unités électroniques alimentées en 12V max 6W;
ATTENTION-sil'oneffectuelarésistancedesdispositifsenmode2,
iln'estpluspossibled'utiliserlesphotocellulesBluebus.
• La modalité de fonctionnement des entrées des bornes OPEN et CLOSE
respectivement en guise de sécurité «photo» et «photo 2» (pour la fonc-
tionnalité, voir le tableau 10 et la figure 18).
Cette modalité de fonctionnement s'active pendant la phase de reconnais-
sance des dispositifs, en maintenant enfoncés les touches [Open] et [Stop]
pendant plus de 8secondes.
Une fois les 8secondes écoulées, le clignotement des LED L1 et L2 devient
très rapide; à ce stade, il est possible de relâcher les touches [Open] et [Stop].
La phase de reconnaissance des dispositifs connectés peut être refaite à tout
moment même après l’installation, par exemple si l’on ajoute un dispositif;
pour effectuer la nouvelle reconnaissance, consulter le paragraphe «8.1.6
Reconnaissance d’autres dispositifs».
5.4 - Reconnaissance de la longueur du vantail
Après la reconnaissance des dispositifs, les LED L3 et L4 commenceront à
clignoter; cela signifie qu’il faut faire reconnaître la longueur du vantail (dis-
tance entre la fin de course de fermeture et la fin de course d’ouverture); cette
mesure est nécessaire pour le calcul des points de ralentissement et le point
d’ouverture partielle.
01. Appuyer simultanément sur les touches [Set] et [t] sans les relâcher
Stop
Set
Open
Close
L1 L2 L3 L4 L5 L6 L7
02. Relâcher les touches quand la manœuvre commence (au bout d’environ 3s).
03. Vérifier que la manœuvre en cours est une ouverture, autrement appuyer
sur la touche [Stop] et relire attentivement le paragraphe «5.1 Sélection
de la direction»; puis répéter à partir du point 1.
04. Attendre que la logique complète la manœuvre d’ouverture jusqu’à ce que
la fin de course d’ouverture soit atteinte; la manœuvre de fermeture com-
mence juste après.
05. Attendre que la logique complète la manœuvre de fermeture.
Reconnaissance de la longueur de vantail en mode 2
Cela permet de configurer:
• Le «ralentissement» en ouverture et fermeture à 10cm;
• Le «paramétrage de la vitesse du moteur» d'ouverture et fermeture à 100%
(modalité super rapide, voir tableau 8).
Cette modalité de fonctionnement s'active pendant la phase de recon-
naissance des dispositifs, en maintenant enfoncées les touches [Stop] et
[Close] pendant plus de 8secondes. Une fois les 8secondes écoulées, le
clignotement des LED L3 et L4 devient très rapide; à ce stade, il est pos-
sible de relâcher les touches [Stop] et [Close].
Si tout cela ne se vérifie pas, il faut couper immédiatement l’alimentation de
la logique de commande et contrôler plus attentivement les connexions élec-
triques. D’autres informations utiles se trouvent dans le chapitre «Résolution
des problèmes».

6
FR
5.5 - Véricationdumouvementduportail
Après la reconnaissance de la longueur du vantail, il est conseillé d’effectuer
quelques manœuvres pour vérifier que le mouvement du portail est correct.
01. Appuyer sur la touche [Open] pour commander une manœuvre d’ouver-
ture; vérifier que l’ouverture du portail s’effectue régulièrement sans varia-
tion de vitesse; le portail ne doit ralentir que lorsqu’il se trouve 70÷50cm
avant la fin de course et il doit s’arrêter, suite à l’intervention de la fin de
course, à 2÷3cm de la butée mécanique d’ouverture.
02. Appuyer sur la touche [Close] pour commander une manœuvre de ferme-
ture; vérifier que la fermeture du portail s’effectue régulièrement sans varia-
tion de vitesse; le portail ne doit ralentir que lorsqu’il se trouve 70÷50cm
avant la fin de course et il doit s’arrêter, suite à l’intervention de la fin de
course, à 2÷3cm de la butée mécanique de fermeture.
03. Durant la manœuvre, vérifier que le clignotant clignote à une fréquence
régulière de 0,5s allumé et 0,5s éteint. Contrôler aussi les clignotements
du voyant (s'il y en a un), relié à la borne S.C.A.: clignotement lent à l'ou-
verture, rapide à la fermeture.
04. Effectuer différentes manœuvres d’ouverture et de fermeture pour mettre
en évidence les éventuels défauts de montage et de réglage ou d’autres
anomalies comme par exemple les points de plus grande friction.
05. Vérifier que les fixations de l’opérateur RUN, de la crémaillère et des pattes
de fin de course sont solides, stables et suffisamment résistantes même en
cas de brusques accélérations ou décélérations du mouvement du portail.
5.6 - Connexion d’autres dispositifs
S’il est nécessaire d’alimenter des dispositifs
extérieurs, par exemple un lecteur de proxi-
mité pour cartes à transpondeur ou bien
l’éclairage du sélecteur à clé, il est possible
de prélever l’alimentation comme l’indique
la figure. La tension d’alimentation est de
24Vcc -30% +50% avec courant maximum
disponible de 100mA.
S'il est nécessaire d'alimenter des disposi-
tifs extérieurs alimentés en 12V auxiliaires, il est
possible de prélever l'alimentation sur la borne
Bluebus une fois le mode de programmation des
dispositifs de type 2 configuré sur la logique.
ATTENTION! – Avec la programmation des dis-
positifs de type 2, on désactive la compatibilité
de la logique avec le système Bluebus.
6
ESSAI ET MISE EN SERVICE
Il s’agit des phases les plus importantes dans la réalisation de l’automatisation
afin de garantir la sécurité maximum. L’essai peut être utilisé également comme
vérification périodique des dispositifs qui composent l’automatisme.
ATTENTION! – L’essai de toute l’installation doit être effectué par du
personnel qualifié et expérimenté qui devra se charger d’établir les
essais prévus en fonction des risques présents et de vérifier le respect
de ce qui est prévu par les lois, les normes et réglementations et en
particulier, toutes les conditions de la norme EN 12445 qui détermine
les méthodes d’essai pour la vérification des automatismes de portails.
6.1 - Essai
Chaque élément de l’automatisme, comme par exemple les bords sensibles,
les photocellules, l’arrêt d’urgence, etc. demande une phase spécifique d’essai;
pour ces dispositifs, il faudra effectuer les procédures figurant dans les manuels
d’instructions respectifs. Pour l’essai de RUN, effectuer les opérations suivantes:
01. Vérifier que tout ce qui est prévu dans le présent manuel est rigoureuse-
ment respecté et en particulier dans le chapitre «1 Avertissements».
02. Débrayer l'opérateur tel qu'indiqué au paragraphe «3.6 - Débrayer et blo-
quer manuellement l'opérateur».
03. Vérifier qu’il est possible de manœuvrer manuellement le portail en ouverture
et en fermeture avec une force ne dépassant pas 390N (environ 40kg).
04. Bloquer l’opérateur.
05. En utilisant les dispositifs de commande ou d’arrêt prévus (sélecteur à clé,
boutons de commande ou émetteurs radio), effectuer des essais d’ouver-
ture, de fermeture et d’arrêt du portail et vérifier que le comportement du
portail correspond à ce qui est prévu.
06. Vérifier un par un le fonctionnement correct de tous les dispositifs de sécu-
rité présents dans l’installation (photocellules, barres palpeuses, arrêt d’ur-
gence, etc.); et vérifier que le comportement du portail correspond à ce
qui est prévu. À chaque fois qu’un dispositif intervient, la LED «BlueBUS»
sur la logique de commande doit effectuer 2clignotements plus rapides
qui confirment qu’elle reconnaît l’événement.
07. Si les risques liés au mouvement du vantail n'ont pas été résorbés par la
limitation de la force d'impact, il faut effectuer la mesure de la force suivant
- +
24Vcc
les prescriptions de la norme EN 12445. Si le réglage de la «Vitesse» et le
contrôle de la force motrice sont utilisés pour aider le système à réduire la
force d'impact, essayer et trouver les réglages offrant les meilleurs résultats.
6.2 - Mise en service
La mise en service ne peut être faite que si toutes les phases d’essai de RUN et
des autres dispositifs ont été exécutées avec résultat positif. La mise en service
partielle ou dans des situations «provisoires» n’est pas autorisée.
01. Réaliser et conserver pendant au moins 10ans le dossier technique de
l'automatisme qui devra comprendre au moins les éléments suivants:
dessin global de l'automatisme, schéma des raccordements électriques,
analyse des risques et solutions adoptées, déclaration de conformité du
fabricant de tous les dispositifs utilisés (pour RUN, utiliser le label CE de
conformité en annexe), copie du manuel d'utilisation et du plan de mainte-
nance de l'automatisme.
02. Fixer sur le portail une plaque comportant au moins les données suivantes:
type d'automatisme, nom et adresse du constructeur (responsable de la
«mise en service»), numéro de matricule, année de construction et label CE.
03. Fixer de manière permanente à proximité du portail une étiquette ou
une plaque indiquant les opérations à effectuer pour le débrayage et la
manœuvre manuelle.
04. Remplir et remettre au propriétaire la déclaration de conformité de l’auto-
matisme.
05. Réaliser et remettre au propriétaire de l’automatisme le manuel «Instruc-
tions et avertissements pour l’utilisation de l’automatisme».
06. Réaliser et remettre au propriétaire le plan de maintenance de l’automa-
tisme (qui doit regrouper toutes les prescriptions pour la maintenance de
chaque dispositif).
07. Avant de mettre en service l’automatisme, informer le propriétaire, de
manière adéquate et par écrit (par exemple dans le manuel d’instructions
et d’avertissements pour l’utilisation de l’automatisme), sur les risques
encore présents.
MAINTENANCE DU PRODUIT
Pour maintenir le niveau de sécurité et pour garantir la durée maximum de tout
l’automatisme, il faut effectuer une maintenance régulière; dans ce but, RUN
dispose d’un compteur de manœuvres et d’un système de signalisation de
maintenance nécessaire ; voir paragraphe «8.2.3 Avis de maintenance».
ATTENTION! – La maintenance doit être effectuée dans le plein res-
pect des consignes de sécurité du présent manuel et suivant les pres-
criptions des lois et normes en vigueur.
Si d’autres dispositifs que l'opérateur RUN sont présents, suivre ce qui est
prévu dans leurs plans de maintenance respectifs.
01. Pour RUN il faut effectuer une maintenance programmée au maximum
dans les 6mois ou quand 20000manœuvres ont été effectuées depuis la
dernière intervention de maintenance.
02. Couper toutes les sources d’alimentation électrique de l’automatisme, y
compris les éventuelles batteries tampon.
03. Vérifier l'état de détérioration de tous les matériaux qui composent l'auto-
matisme avec une attention particulière pour détecter les éventuels phéno-
mènes d'érosion ou d'oxydation des parties de la structure; remplacer les
parties qui n'offrent pas de garanties suffisantes.
04. Vérifier l'état d'usure des parties en mouvement: pignon, crémaillère et
toutes les parties du vantail, remplacer les parties usées.
05. Reconnecter les sources d’alimentation électrique et effectuer tous les
essais et les contrôles prévus dans le paragraphe «6.1 Essai».
MISE AU REBUT DU PRODUIT
Ce produit fait partie intégrante de l’automatisme et doit donc être mis
au rebut avec ce dernier.
De même que pour les opérations d’installation, à la n de la vie de ce produit, les
opérations de démantèlement doivent être effectuées par du personnel qualié.
Ce produit se compose de divers matériaux: certains peuvent être recyclés,
d'autres doivent être mis au rebut. Informez-vous sur les systèmes de recy-
clage ou de mise au rebut prévus par les normes en vigueur dans votre région
pour cette catégorie de produit.
Attention! – certains composants du produit peuvent contenir des subs-
tances polluantes ou dangereuses qui pourraient avoir des effets nuisibles sur
l’environnement et sur la santé des personnes s’ils étaient jetés dans la nature.
Comme l’indique le symbole ci-contre, il est interdit de jeter ce
produit avec les ordures ménagères. Par conséquent, utiliser
la méthode du «tri sélectif» pour la mise au rebut des compo-
sants conformément aux prescriptions des normes en vigueur
dans le pays d’utilisation ou restituer le produit au vendeur lors
de l’achat d’un nouveau produit équivalent.
Attention! – les règlements locaux en vigueur peuvent prévoir de lourdes
sanctions en cas d’élimination prohibée de ce produit.
+ -
12Vcc

7
FR
7
PROGRAMMATION
7.1 - Fonctions préprogrammées
La logique de commande de RUN dispose de certaines fonctions program-
mables; en usine ces fonctions sont réglées suivant une configuration qui
devrait satisfaire la plupart des automatisations.
7.2 - Touches de programmation
Sur la logique de commande de RUN se trouvent 3touches qui peuvent être
utilisées aussi bien pour la commande de la logique durant les essais que pour
les programmations:
Open La touche «OPEN» permet de commander l’ouverture du portail
s ou de déplacer vers le haut le point de programmation
Stop Lorsque l'on appuie sur la touche «STOP» pendant plus de
Set 5secondes, cela permet d'accéder au mode de programmation
Close La touche «CLOSE» permet de commander la fermeture du
t portail ou de déplacer vers le bas le point de programmation
Stop
Set
Close
Open
SCA
Flash
Bluebus
Stop
L1 L2 L3 L4 L5 L6 L7 L8
1.6A T
7.3 - Programmations
La logique de commande de RUN possède quelques fonctions programmables; le réglage des fonctions s’effectue par le biais de 3touches présentes sur la
logique [s] [Set] [t] et les fonctions sont visualisées à l’aide de 8 LED: L1….L8.
Les fonctions programmables disponibles sur RUN sont réparties sur deux niveaux:
Premierniveau: fonctions réglables en mode ON-OFF (actif ou non actif); dans ce cas, chaque LED L1….L8 indique une fonction, si elle est allumée la fonction
est active, si elle est éteinte la fonction n’est pas active; voir tableau 6.
Deuxièmeniveau: paramètres réglables sur une échelle de valeurs (valeurs de 1 à 8); dans ce cas, chaque LED L1….L8 indique la valeur réglée parmi les 8
possibles; voir tableau 8.
TABLEAU6:listedesfonctionsprogrammables:premierniveau
LED Fonction Description
L1 Fermeture auto-
matique
Cette fonction permet une fermeture automatique du portail après le temps de pause programmé; le Temps de pause
est réglé en usine à 30secondes mais peut être modifié à 5, 15, 30, 45, 60, 80, 120 et 180secondes. Si la fonction
n’est pas active, le fonctionnement est «semi-automatique».
L2 Fermeture
immédiate après
passage devant
photocellule
Cette fonction permet de garder le portail ouvert uniquement le temps nécessaire au transit, en effet après passage
l’intervention de «Photo» provoque toujours une fermeture automatique avec un temps de pause de 5s (indépendam-
ment de la valeur programmée). Le comportement varie suivant que la «Fermeture Automatique» est active ou pas.
Si la «Fermeture automatique» n’est pas active: Le portail atteint toujours la position d’ouverture totale (même si la
libération de la photocellule a lieu avant). La libération de la photocellule provoque une manœuvre de fermeture auto-
matique au bout de 5s.
Si la «Fermeture automatique» est active: la manœuvre d'ouverture s'arrête après la désactivation des cellules et la
porte se ferme automatiquement après une pause de 5s.
La fonction «Fermeture immédiate après passage devant photocellule» est toujours désactivée dans les manœuvres
interrompues par une commande de Stop.
Si la fonction «Fermeture immédiate après passage devant photocellule» n’est pas active, le temps de pause sera celui
qui est programmé ou bien il n’y aura pas de fermeture automatique si la fonction n’est pas active.
L3 Ferme toujours La fonction «Ferme toujours» intervient, en provoquant une fermeture, quand au retour de l’alimentation la logique
détecte que le portail est ouvert. Pour des questions de sécurité, la manœuvre est précédée par 5s de préclignotement.
Si la fonction n’est pas active au retour de l’alimentation, le portail restera arrêté.
L4 Stand-by Cette fonction permet de réduire au maximum la consommation d'énergie, elle est utile en particulier dans le fonc-
tionnement avec batterie tampon. Si cette fonction est active, 1 minute après la fin de la manoeuvre, la logique éteint
BLUEBUS (et donc les dispositifs) et toutes les led sauf la led BLUEBUS qui clignotera plus lentement. Quand une
commande arrive, la logique rétablit le plein fonctionnement. Si la fonction n'est pas active, il n'y aura pas de réduction
des consommations.
L5 Démarrage Avec l’activation de cette fonction, l’accélération progressive au début de chaque manœuvre est désactivée; cela per-
met d’avoir la force de démarrage maximum et c’est utile en cas de frictions statiques élevées, par exemple en cas de
neige ou de givre qui bloquent le portail. Si la fonction Démarrage n’est pas active, la manœuvre commence avec une
accélération progressive.
L6 Préclignotement Avec la fonction de préclignotement, une pause de 3s est ajoutée entre l’allumage du clignotant et le début de la
manœuvre pour avertir l’utilisateur de la situation de danger. Si la fonction Préclignotement n’est pas active, l’allumage
du clignotant coïncide avec le début de la manœuvre.
L7 «Fermeture»
devient«Ouver-
turepartielle»
En activant cette fonction, toutes les commandes «fermeture» (entrée «CLOSE» ou commande radio «fermeture»)
activent une manœuvre d’ouverture partielle (voir LED L6 sur tableau 8).
L8 Mode«Slave»
(esclave)
En activant cette fonction ROBUS devient «Slave» (esclave): il est possible, ainsi, de synchroniser le fonctionnement
de 2 moteurs sur des parties coulissantes opposées dans lesquelles un moteur fonctionne comme Maître et un comme
Esclave; pour plus de détails, voir le paragraphe «8.1.5 RUN en mode Esclave».
Durant le fonctionnement normal de RUN, les LED L1….L8 sont allumées ou éteintes suivant l’état de la fonction à laquelle elles correspondent, par exemple
L1 est allumée si la «Fermeture automatique» est active.
7.4 - Programmation du premier niveau (fonctions ON-OFF)
Par défaut, les fonctions du premier niveau sont toutes placées sur «OFF» mais peuvent être modiées à tout moment comme indiqué dans le tableau 6. Faire
attention durant la procédure car il ne faut pas que plus de 10secondes s'écoulent entre la pression d'une touche et l'autre: dans le cas contraire, la procédure
se termine automatiquement et mémorise les modications effectuées jusqu'à ce moment-là.
TABLEAU 7
Pour changer les fonctions ON-OFF
01. Appuyer sur et maintenir enfoncée la touche «Set» pendant 3s environ.

8
FR
02. Relâcher la touche «Set» quand la LED L1 commence à clignoter;
03.
Appuyer sur la touche «s» ou «t» pour déplacer la LED clignotante sur la LED qui correspond à la fonction à modier;
04. Appuyer sur la touche «Set» pour changer l’état de la fonction: (clignotement bref = OFF; clignotement long = ON);
05. Attendre 10secondes (délai maximal) pour quitter la programmation.
Note – les points 3 et 4 peuvent être répétés au cours de la même phase de programmation pour mettre d’autres fonctions en mode ON ou OFF.
7.5 - Programmation du second niveau (paramètres réglables)
En usine, les paramètres réglables sont réglés comme l’illustre le tableau 8 avec: « » mais ils peuvent être modifiés à tout moment comme l'indique le tableau
9. Faire attention durant la procédure car il ne faut pas que plus de 10secondes s'écoulent entre la pression d'une touche et l'autre: dans le cas contraire, la
procédure se termine automatiquement et mémorise les modifications effectuées jusqu'à ce moment-là.
TABLEAU 8 - Fonctions deuxième niveau (paramètres réglables)
LEDd'entrée Paramètre LED (niveau) Valeur Description
L1 Temps de
pause
L1 5secondes Règle le temps de pause, c’est-à-dire le
temps avant la fermeture automatique.
La fonction n’a d’effet que si la fermeture
automatique est active.
L2 15secondes
L3 30secondes
L4 45secondes
L5 60secondes
L6 80secondes
L7 120secondes
L8 180secondes
L2 Fonction
P.P.
L1 Ouverture - Stop - Fermeture - Stop Règle la séquence de commandes asso-
ciées à l’entrée P.P. ou bien à la première
commande radio.
L2 Ouverture - stop - fermeture - ouverture
L3 Ouverture - fermeture- ouverture – fermeture
L4 Fonctionnement collectif
L5 Fonctionnement collectif 2 (plus de 2s provoque un stop)
L6 Pas à Pas 2 (moins de 2s provoque une ouverture partielle)
L7 Homme mort
L8 Ouverture en «semi-automatique», fermeture «homme
mort»
L3 Vitesse
moteur
L1 Très lente Règle la vitesse du moteur durant la
course normale.
L2 Lente
L3 Moyenne
L4 Rapide
L5 Très rapide
L6 Super rapide
L7 Ouverture «rapide»; fermeture «lente»
L8 Ouverture «super rapide», Fermeture «rapide»
L4 Sortie
S.C.A.
L1 Fonction «voyant portail ouvert» Règle la fonction associée à la sortie
S.C.A. (quelle que soit la fonction associée,
la sortie, quand elle est active, fournit
une tension de 24V -30 +50% avec une
puissance maximum de 4W)
L2 Active si le portail est fermé
L3 Active si le portail est ouvert
L4 Active avec sortie radio N°2
L5 Active avec sortie radio N°3
L6 Active avec sortie radio N°4
L7 Voyant maintenance
L8 Serrure électrique
L5 Force
moteur
L1 Portail extrêmement léger Le système de contrôle de la force mesure
aussi la température ambiante en augmen-
tant automatiquement la force en cas de
températures particulièrement basses.
L2 Portail très léger
L3 Portail léger
L4 Portail moyen
L5 Portail moyen-lourd
L6 Portail lourd
L7 Portail très lourd
L8 Portail extrêmement lourd
L6 Ouverture
partielle
L1 0,5m Règle la mesure de l’ouverture partielle.
L’ouverture partielle peut se commander
uniquement avec la 2ème commande
radio ou bien avec «FERMETURE», si
la fonction est présente, «Fermeture»
devient alors «Ouverture partielle»
L2 1m
L3 1,5m
L4 2m
L5 2,5m
L6 3m
L7 3,4m
L8 4m

9
FR
L7 Avis de
mainte-
nance
L1 Automatique (suivant la charge de travail des manœuvres) Règle le nombre de manœuvres après
lequel il faut signaler la demande de main-
tenance de l’automatisme (voir paragraphe
«8.2.3 Avis de Maintenance»).
L2 1000
L3 2000
L4 4000
L5 7000
L6 10000
L7 15000
L8 20000
L8 Liste ano-
malies
L1 Résultat 1
ère
manœuvre (la plus récente) Permet de vérier le type d’anomalie qui
s’est vériée au cours des 8dernières
manœuvres (voir paragraphe «7.6.1 Histo-
rique des anomalies»).
L2 Résultat 2
ème
manœuvre
L3 Résultat 3
ème
manœuvre
L4 Résultat 4
ème
manœuvre
L5 Résultat 5
ème
manœuvre
L6 Résultat 6
ème
manœuvre
L7 Résultat 7
ème
manœuvre
L8 Résultat 8
ème
manœuvre
Notes:
• Les cellules de couleur grise correspondent au réglage d'usine.
• Tous les paramètres peuvent être réglés suivant les préférences sans aucune contre-indication; seul le réglage «force moteur» pourrait exiger une attention particulière:
- Il est déconseillé d’utiliser des valeurs de force élevées pour compenser le fait que le portail a des points de friction anormaux. Une force excessive peut compromettre le fonctionnement du système de sécurité
ou endommager le portail.
- Si le contrôle de la «force moteur» est utilisé comme soutien du système pour la réduction de la force d’impact, après chaque réglage, répéter la mesure de la force, comme le prévoit la norme EN 12445.
- L’usure et les conditions atmosphériques peuvent influencer le mouvement du portail, périodiquement il faut recontrôler le réglage de la force.
TABLEAU 9
Procédure de programmation de niveau 2 (paramètres réglables)
01. Appuyer sur et maintenir enfoncée la touche Set pendant 3s environ.
02. Relâcher la touche «Set» quand la LED L1 commence à clignoter;
03.
Appuyer sur la touche «s» ou «t» pour déplacer la LED clignotante sur la LED qui correspond à la fonction à modier;
04. Appuyer sur la touche Set et la maintenir enfoncée jusqu'à la n du point 06;
05. Attendre environ 3s puis la LED qui correspond au niveau actuel du paramètre à modier s'allumera;
06.
Appuyer sur la touche «s» ou «t» pour déplacer la LED représentant la valeur du paramètre;
07. Relâcher la touche «Set»;
08. Attendre 10secondes (délai maximal) pour quitter la programmation.
Note – les points de 3 à 7 peuvent être répétés au cours de la même phase de programmation pour régler plusieurs paramètres.
8
INFORMATIONS COMPLÉMENTAIRES
8.1 - Ajout ou enlèvement de dispositifs
À un automatisme avec RUN, on peut ajouter ou enlever des dispositifs à
n’importe quel moment. En particulier, à «BLUEBUS» et à l’entrée «STOP»,
on peut connecter différents types de dispositifs comme l’indiquent les para-
graphes suivants.
Après avoir ajouté ou enlevé des dispositifs, il faut procéder de nou-
veau à la reconnaissance des dispositifs suivant les indications du
paragraphe«8.1.6Reconnaissanced’autresdispositifs».
8.1.1 - BlueBUS
BlueBUS est une technique qui permet d’effectuer les connexions des dis-
positifs compatibles avec seulement deux conducteurs sur lesquels transitent
aussi bien l’alimentation électrique que les signaux de communication. Tous
les dispositifs sont connectés en parallèle sur les 2 mêmes conducteurs de
BlueBUS sans devoir respecter une polarité quelconque; chaque dispositif est
reconnu individuellement car au cours de l’installation le système lui attribue
une adresse univoque. Il est par exemple possible de connecter à BlueBus:
des photocellules, des dispositifs de sécurité, des boutons de commande, des
voyants de signalisation, etc. La logique de commande de RUN reconnaît un
par un tous les dispositifs connectés à travers une procédure de reconnais-
sance adéquate et est en mesure de détecter de manière extrêmement sûre
toutes les anomalies éventuelles. Pour cette raison, à chaque fois qu’on ajoute
ou qu’on enlève un dispositif connecté à BlueBUS il faudra effectuer dans la
logique la procédure de reconnaissance décrite dans le paragraphe «8.1.6
Reconnaissance d’autres dispositifs».
8.1.2 - Entrée STOP
STOP est l’entrée qui provoque l’arrêt immédiat de la manœuvre suivi d’une
brève inversion. On peut connecter à cette entrée des dispositifs avec sor-
tie à contact normalement ouvert «NO», normalement fermé «NF» ou des
dispositifs avec sortie à résistance constante 8,2kΩ, par exemple des bords
sensibles.
Comme pour BlueBUS, la logique reconnaît le type de dispositif connecté à
l’entrée STOP durant la phase de reconnaissance (voir paragraphe «8.1.6
Reconnaissance d’autres dispositifs») ; ensuite on a un STOP quand une
variation quelconque se vérifie par rapport à l’état reconnu.
En adoptant certaines solutions, on peut connecter à l’entrée STOP plus d’un
dispositif, même de type différent:
• Plusieurs dispositifs NO peuvent être connectés en parallèle entre eux sans
aucune limite de quantité.
• Plusieurs dispositifs NF peuvent être connectés en parallèle entre eux sans
aucune limite de quantité.
• Deux dispositifs avec sortie à résistance constante 8,2kΩ peuvent être
connectés en parallèle; s’il y a plus de 2 dispositifs, tous doivent être
connectés en «cascade» avec une seule résistance terminale de 8,2kΩ.
• Il est possible de combiner NO et NF en mettant les deux contacts en paral-
lèle, en prenant la précaution de mettre en série au contact NF une résis-
tance de 8,2kΩ (cela donne aussi la possibilité de combiner 3 dispositifs:
NO, NF et 8,2kΩ).
ATTENTION–sil’entréeSTOPestutiliséepourconnecterdesdisposi-
tifs ayant des fonctions de sécurité, seuls les dispositifs avec sortie à
résistanceconstante8,2kΩgarantissentlacatégorie3desécuritéaux
pannes selon la norme EN 954-1.
8.1.3 - Photocellules
Le système «BlueBUS» permet, à travers l’adressage avec les cavaliers pré-
vus à cet effet, la reconnaissance des photocellules de la part de la logique
et d’attribuer la fonction de détection correcte. L’opération d’adressage doit
être faite aussi bien sur TX que sur RX (en plaçant les cavaliers de la même
manière) en vérifiant qu’il n’y a pas d’autres paires de photocellules ayant la
même adresse.
Sur un automatisme pour portails coulissants avec RUN, il est possible de
monter les cellules photoélectriques tel qu’illustré dans le Tableau 10 et la
Fig. A.
Après l’installation ou l’enlèvement de photocellules, il faudra effectuer dans
la logique la phase de reconnaissance comme le décrit le paragraphe «8.1.6
Reconnaissance d’autres dispositifs».

10
FR
TABLEAU 10 - ADRESSES DES PHOTOCELLULES
Photocellule Cavaliers
PHOTO Photocellule extérieure h = 50 avec
intervention en fermeture
PHOTO II Photocellule extérieure h = 100 avec
intervention en fermeture
PHOTO 1 Photocellule intérieure h = 50 avec
intervention en fermeture
PHOTO 1 II Photocellule intérieure h = 100 avec
intervention en fermeture
PHOTO 2 Cellule photoélectrique extérieure
avec intervention à l’ouverture
PHOTO 2 II Cellule photoélectrique intérieure avec
intervention à l’ouverture
PHOTO 3 Photocellule unique qui couvre tout
l’automatisme
ATTENTION – L’installation de PHOTO 3 avec PHOTO II demande que la
position des éléments qui composent la photocellule (TX-RX) respecte la
recommandation donnée dans le manuel d’instructions des photocellules.
A
8.1.4 - Photodétecteur FT210B
Le photodétecteur FT210B réunit dans un seul dispositif un système de limi-
tation de la force (type C suivant la norme EN12453) et un détecteur de pré-
sence qui détecte les obstacles présents sur l’axe optique entre l’émetteur TX
et le récepteur RX (type D suivant la norme EN12453). Dans le photodétecteur
FT210B, les signaux de l’état du bord sensible sont envoyés à travers le rayon
de la photocellule en intégrant les 2 systèmes dans un seul dispositif. La partie
émettrice située sur la partie mobile est alimentée par des batteries, ce qui
permet d’éliminer les systèmes de connexion, peu esthétiques; les circuits
spéciaux réduisent la consommation de la batterie pour garantir jusqu’à 15 ans
de durée (voir les détails sur la durée estimée dans les instructions du produit).
Un seul dispositif FT210B associé à un bord sensible (TCB65 par exemple) per-
met d’atteindre le niveau de sécurité du «bord primaire» requis par la norme
EN12453 pour n’importe quel «type d’utilisation» et «type d’activation».
Le photodétecteur FT210B associé aux bords sensibles «à variation de résis-
tance» (8,2kΩ), maintient la sécurité en cas de défaut unique (catégorie 3 sui-
vant la norme EN 954-1). Il dispose d’un circuit anticollision qui évite les interfé-
rences avec d’autres détecteurs même s’ils ne sont pas synchronisés et permet
d’ajouter d’autres photocellules; par exemple, en cas de passage de véhicules
lourds où l’on place normalement une deuxième photocellule à 1m du sol.
Pour tout renseignement supplémentaire sur les modalités de connexion et
d’adressage, voir le manuel d’instructions de FT210B.
8.1.5 - RUNenmode«Esclave»
Si on le programme et si on le connecte de manière adéquate, RUN peut fonc-
tionner en mode «Slave» (esclave); ce mode de fonctionnement est utilisé
s’il faut automatiser 2 parties coulissantes opposées et si l’on souhaite que
leur mouvement s’effectue de manière synchronisée. Dans ce mode, un RUN
fonctionne comme Master (maître) c’est à dire qu’il commande les manœuvres,
tandis que le deuxième RUN fonctionne comme Slave, c’est-à-dire qu’il exé-
cute les commandes envoyées par le Master (par défaut, tous les RUN sortent
de l’usine en mode Master).
Pour configurer RUN comme Slave, il faut activer la fonction de premier niveau
«Mode Slave» (voir tableau 6).
La connexion entre le RUN Master et le RUN Slave s’effectue par BlueBUS.
ATTENTION– Dans ce cas il faut respecter la polarité dans la connexion
entrelesdeuxRUNcommel’illustrelagure18(lesautresdispositifs
continuent à ne pas avoir de polarité).
Pour installer 2 RUN en mode Master et Slave effectuer les opérations sui-
vantes:
• Effectuer l’installation des 2 moteurs comme l’illustre la gure. On peut choisir
l’un ou l’autre moteur comme Maître et comme Esclave; dans le choix, il faut
tenir compte de la commodité des connexions et du fait que la commande
Pas à pas sur l'Esclave permet l’ouverture totale uniquement de la partie
commandée par le moteur Esclave.
• Connecter les 2 moteurs comme sur la gure 18.
• Sélectionner le sens de manœuvre d’ouverture des 2 moteurs comme l’in-
dique la gure (voir aussi le paragraphe «5.1 Sélection de la direction»).
• Alimenter les 2 moteurs.
• Sur le RUN Esclave, programmer la fonction «Mode Slave» (voir tableau 6).
• Effectuer la reconnaissance des dispositifs sur le RUN Slave (voir paragraphe
«8.1.6 Reconnaissance des dispositifs»).
• Effectuer la reconnaissance des dispositifs sur le RUN Master (voir para-
graphe «8.1.6 Reconnaissance des dispositifs»).
• Effectuer la reconnaissance de la longueur des vantaux sur le RUN Master
(voir paragraphe «5.4 Reconnaissance de la longueur du vantail»).
Lors de la connexion de 2 RUN en mode Master-Slave faire attention aux
points suivants:
• Tous les dispositifs doivent être connectés sur le RUN Master (comme sur la
fig. 18) y compris le récepteur radio.
• Si l’on utilise des batteries tampon, chaque moteur doit avoir la sienne.
• Toutes les programmations sur le RUN Slave sont ignorées (celles du RUN
Master prédominent) sauf celles qui figurent dans le tableau 11.
TABLEAU 11 - Programmations sur RUN Slave
indépendantes de RUN Master
Fonctions de premier niveau
(fonctionsON–OFF)
Fonctions de second niveau
(paramètres réglables)
Stand-by Vitesse moteur
Démarrage Sortie S.C.A.
Mode Slave Force moteur
Liste Erreurs
Sur l'Esclave, il est possible de connecter:
• un clignotant spécique (Flash)
• un voyant portail ouvert (S.C.A) spécique
• un bord sensible (Stop) spécique
• un dispositif de commande (P.P.) spécique qui commande l’ouverture
totale seulement de la partie Slave.
• Sur le Slave, les entrées Open et Close ne sont pas utilisées.
8.1.6 - Reconnaissance d’autres dispositifs
Normalement, la procédure de reconnaissance des dispositifs connectés à Blue-
BUS et à l’entrée STOP est effectuée durant la phase d’installation; toutefois, si
des dispositifs sont ajoutés ou enlevés, il est possible de refaire la reconnaissance
de la manière indiquée dans le tableau 12.
TABLEAU 12
Pour la reconnaissance d’autres dispositifs
01.
Appuyer sur les touches «s» et «Set» et les maintenir enfoncées;
02. Relâcher la touche «Set» quand la LED L1 commence à clignoter;
03. Relâcher les touches quand les LED «L1» et «L2» commencent à
clignoter très rapidement (au bout d’environ 3s);

11
FR
04. Au terme de la phase de reconnaissance, les LED L1 et L2 cessent
de clignoter, la LED STOP doit rester allumée tandis que les LED
L1…L8 s'allument selon l'état des fonctions ON-OFF qu'elles
représentent.
ATTENTION – Après avoir ajouté ou enlevé des dispositifs, il faut effectuer de nou-
veau l’essai de l’automatisme suivant les indications du paragraphe «6.1 Essai».
8.1.7 - Récepteur radio
Pour la commande à distance de RUN, la logique de commande est munie
d’un connecteur SM pour récepteurs radio type SMXI ou SMXIS en option.
Pour tout renseignement supplémentaire, consulter le manuel d’instructions
du récepteur radio. Pour brancher le récepteur radio, procéder comme illustré
figure 20. Le tableau 13 décrit l'association entre la sortie du récepteur radio et
la commande que RUN effectuera:
TABLEAU 13 - Commandes avec récepteur SMXI, SMXIS
Sortie N°1 Commande «P.P.» (Pas à pas)
Sortie N°2 Commande «Ouverture partielle»
Sortie N°3 Commande «Ouverture»
Sortie N°4 Commande «Fermeture»
8.1.8 - Branchement du programmateur Oview
L’unité présente un connecteur BusT4 auquel il est possible de brancher l’unité
de programmation Oview, qui permet de gérer totalement et rapidement la
phase d’installation, d’entretien et de diagnostic de tout l’automatisme. Pour
accéder au connecteur, procéder tel qu’illustré g.21 et insérer le connec-
teur dans son logement. L’Oview peut être relié simultanément à plusieurs
unités, jusqu’à 16 sans précautions spéciales, jusqu’à 60 en respectant les
recommandations correspondantes, et peut même rester branché à la logique
pendant le fonctionnement normal de l’automatisme. Dans ce cas, il peut être
utilisé pour envoyer directement les commandes à l’unité en utilisant le menu
«utilisateur». Il est également possible de mettre le micrologiciel à jour. Si la
logique de commande est munie d’un récepteur radio appartenant à la famille
OXI (ou OXIT), en utilisant l’Oview, il est possible d’avoir accès aux paramètres
des émetteurs mémorisés dans le récepteur.
Pour de plus amples renseignements, consulter le manuel d’instructions cor-
respondant et le manuel du système «Opera system book».
8.1.9 - Branchement et pose de la batterie tampon
ATTENTION!
– Le raccordement électrique de la batterie à la logique
doit être effectué seulement après avoir terminé toutes les phases
d’installation et de programmation, car la batterie est un dispositif
d’alimentation électrique d’urgence.
Pour les modèles RUN400HS et RUN1200HS, il est possible de connecter
des batteries tampon en utilisant comme interface la carte chargeur PS524,
associée à la paire de batteries B12-B.4310 (12V - 7Ah).
Procéder en respectant les phases de la fig. 22:
01. Insérer la carte chargeur PS524 tel qu'indiqué à la phase 1
02. Insérer les batteries déjà connectées tel qu'indiqué aux phases 2 et 3
03. Raccorder le connecteur des batteries à la carte chargeur PS524 (phase
4) puis connecter le câble de connexion à la logique de commande tel
qu'indiqué à la phase 5
04. Positionner le câble de connexion entre la logique de commande et la
carte chargeur tel que le montre l'image de la phase 6.
Note - En cas de nécessité, la logique de commande et la carte chargeur
peuvent être retirées en agissant sur les languettes prévues à cet effet (fig. 23).
8.2 - Fonctions spéciales
8.2.1-Fonction«Ouvretoujours»
La fonction «Ouvre toujours» est une propriété de la logique de commande qui
permet de commander toujours une manœuvre d’ouverture quand la commande
de «Pas à Pas» a une durée supérieure à 2secondes; c’est utile par exemple pour
connecter à la borne P.P. le contact d’une horloge de programmation pour mainte-
nir le portail ouvert pendant une certaine plage horaire. Cette propriété est valable
quelle que soit la programmation de l’entrée P.P. à l’exclusion de la programmation
comme «Fermeture», voir paramètre «Fonction P.P.» dans le tableau 8.
8.2.2-Fonction«Manœuvredanstouslescas»
Si un dispositif de sécurité quelconque devait mal fonctionner ou tomber en
panne, il est possible dans tous les cas de commander et de manœuvrer le
portail en mode «Homme mort».
Pour tout détail, voir le paragraphe «Commande avec sécurités hors d’usage»
présent dans les «Instructions et recommandations destinées à l’utilisateur de
l’opérateur RUN» ci-jointes.
8.2.3 - Avis de maintenance
RUN permet d’aviser l’utilisateur quand il faut procéder à la maintenance de
l’automatisme. Le nombre de manœuvres après lequel s’effectue la signalisa-
tion est sélectionnable parmi 8 niveaux, avec le paramètre réglable «Avis de
maintenance» (voir tableau 8).
Le niveau 1 de réglage est «automatique» et tient compte de l’intensité et des
conditions des manœuvres, c’est-à-dire de l’effort et de la durée de la manœuvre,
tandis que les autres réglages sont fixés en fonction du nombre de manœuvres.
La signalisation de demande de maintenance s’effectue par le biais du cligno-
tant Flash ou bien sur le voyant connecté à la sortie S.C.A. quand il est pro-
grammé comme «Voyant Maintenance» (voir tableau 8).
Suivant le nombre de manœuvres effectuées par rapport à la limite program-
mée, le clignotant Flash et le voyant de maintenance donnent les signalisations
indiquées dans le tableau 14.
TABLEAU 14 - Avis de maintenance avec Flash et voyant de
maintenance
Nombre de ma-
nœuvres
Signalisation sur
Flash
Signalisation sur
voyant maintenance
Inférieur à 80 % de la
limite
Normal (0,5s allumé,
0,5s éteint)
Allumé pendant 2s au
début de l’ouverture
Entre 81 et 100% de
la limite
Au début de la ma-
nœuvre, il reste allumé
pendant 2s,
Clignote pendant toute
la manoeuvre
Au-delà de 100% de
la limite
Au début et à la n de
la manœuvre, il reste
allumé
Il clignote toujours pen-
dant 2s puis continue
normalement
8.2.4-Véricationdunombredemanœuvreseffectuées
Avec la fonction «Avis de maintenance», il est possible de vérifier le nombre
de manœuvres effectuées en pourcentage de la limite fixée. Pour la vérification,
procéder suivant la description du tableau 15.
TABLEAU 15
Véricationdunombredemanœuvreseffectuées
01. Appuyer sur et maintenir enfoncée la touche «Set» pendant 3s environ.
02. Relâcher la touche «Set» quand la LED L1 commence à clignoter.
03.
Appuyer sur la touche «s» ou «t» pour déplacer la LED
clignotante sur L7, c’est-à-dire la «LED d’entrée» pour le paramètre
«Avis de maintenance»;
04. Appuyer sur la touche «Set» et la maintenir enfoncée pendant
toute la durée des phases 5, 6 et 7;
05. Attendre environ 3secondes, après quoi la LED qui représente le
niveau actuel du paramètre «Avis de maintenance» s’allumera;
06.
Appuyer puis relâcher immédiatement les touches «s» et «t»;
07. La LED correspondant au niveau sélectionné exécute quelques
clignotements. Le nombre de clignotements identie le pourcentage
de manœuvres effectuées (en multiples de 10%) par rapport à la limite
programmée.
Par exemple : en réglant l’avis de maintenance sur L6, c’est-à-
dire 10 000, 10% correspond à 1000 manœuvres; si la LED de
signalisation émet 4 clignotements, cela signie que l’on a atteint 40%
des manœuvres (c’est-à-dire entre 4000 et 4999 manœuvres). Si l’on
n’a pas atteint 10% des manœuvres il n’y aura aucun clignotement;
08. Relâcher la touche «Set».
8.2.5-Miseàzéroducompteurdesmanœuvres
Après avoir effectué la maintenance de l’installation, il faut mettre à zéro le compteur
des manœuvres. Pour la vérification, procéder suivant la description du tableau 16.
TABLEAU 16
Remiseàzéroducompteurdemanœuvres
01. Appuyer sur et maintenir enfoncée la touche «Set» pendant
3secondes environ;
02. Relâcher la touche «Set» quand la LED L1 commence à clignoter;
03.
Appuyer sur la touche «s» ou «t» pour déplacer la LED
clignotante sur L7, c’est-à-dire la «LED d’entrée» pour le paramètre
«Avis de maintenance»;
04. Appuyer sur la touche «Set» et la maintenir enfoncée pendant
toute la durée des phases 5 et 6;
05. Attendre environ 3secondes, après quoi la LED qui représente le
niveau actuel du paramètre «Avis de maintenance» s’allumera;
06.
Appuyer sur et maintenir enfoncées les touches «s» et «t» pen-
dant au moins 5secondes puis relâcher les 2 touches. La LED cor-
respondant au niveau sélectionné effectuera une série de clignotements
rapides pour signaler que le compteur des manœuvres a été mis à zéro;
07. Relâcher la touche «Set».

12
FR
9
QUE FAIRE SI… guide à la résolution des problèmes
9.1 - DIAGNOSTIC
Certains dispositifs sont prévus pour émettre un signal permettant de détecter l'état de fonctionnement ou les anomalies éventuelles.
Les paragraphes suivants décrivent les différents signaux par type de dispositif.
9.2 - Résolution des problèmes
Le tableau 17 comportent des indications utiles permettant de faire face à divers cas de dysfonctionnement qui pourraient se produire lors de la phase d'instal-
lation ou bien en cas de panne.
TABLEAU 17
Recherche des pannes
01. L’émetteur radio ne commande pas le portail et la LED
sur l’émetteur ne s’allume pas.
Vérier si les piles de l’émetteur sont usagées et les remplacer éventuellement
02. L’émetteur radio ne commande pas le portail mais la
LED sur l’émetteur s’allume.
Vérier si l’émetteur est correctement mémorisé dans le récepteur radio
03. Aucune manœuvre n’est commandée et la LED
«BLUEBUS» ne clignote pas
Vérier si RUN est alimenté par le courant du réseau électrique.
Vérier que les fusibles F1, F2 et F3 ne sont pas grillés; si c’est le cas, vérier la cause
de la panne et les remplacer par d’autres ayant la même valeur de courant et les mêmes
caractéristiques.
04. Aucune manœuvre n’est commandée et le clignotant
est éteint.
Vérier que la commande est effectivement reçue. Si la commande arrive à l’entrée PP, la
LED «PP» correspondante doit s’allumer; si par contre on utilise l’émetteur radio, la LED
«Bluebus» doit faire deux clignotements rapides.
05. Aucune manœuvre n’est commandée et le clignotant
fait quelques clignotements
Compter le nombre de clignotements et vérier suivant les indications du tableau 19
06. La manœuvre commence mais juste après on a une
inversion.
La force sélectionnée pourrait être trop basse pour le type de portail. Vérier s’il y a des obs-
tacles et sélectionner éventuellement une force supérieure.
07. La manœuvre est effectuée régulièrement mais le cli-
gnotant ne fonctionne pas.
Vérier que durant la manœuvre la tension arrive à la borne FLASH du clignotant (comme
il est intermittent, la valeur de tension n’est pas signicative: environ 10-30Vcc); si la
tension arrive, le problème est dû à la lampe qui devra être remplacée par une autre de
caractéristiques identiques; s’il n’y a pas de tension, il pourrait y avoir un problème de
surcharge sur la sortie FLASH, vérier qu’il n’y a pas de court-circuit sur le câble.
08. La manœuvre est effectuée régulièrement mais le
voyant SCA ne fonctionne pas.
Vérier le type de fonction programmée pour la sortie SCA (Tableau 8).
Quand le voyant devrait être allumé, vérier que la tension arrive à la borne SCA (environ
24Vcc); si la tension arrive, le problème est dû au voyant qui devra être remplacé par un
autre de caractéristiques identiques; s’il n’y a pas de tension, il pourrait y avoir un problème
de surcharge sur la sortie SCA, vérier qu’il n’y a pas de court-circuit sur le câble.
9.3 - Liste historique des anomalies
RUN permet d’afcher les éventuelles anomalies qui se sont produites lors des 8 dernières manœuvres. Par exemple, l’interruption d’une manœuvre due à
l’intervention d’une photocellule ou d’un bord sensible. Pour vérier la liste des anomalies, procéder comme indiqué au tableau 18.
TABLEAU 18
Historique des anomalies
01. Appuyer sur et maintenir enfoncée la touche «Set» pendant 3s environ.
02. Relâcher la touche «Set» quand la LED L1 commence à clignoter.
03.
Appuyer sur la touche «s» ou «t» pour déplacer la LED clignotante sur L8, c’est-à-dire la «LED d’entrée» pour le paramètre «Liste anomalies»;
04. Appuyer sur la touche «Set» et la maintenir enfoncée pendant toute la durée des phases 5 et 6;
05. Attendre environ 3secondes, après quoi les LED correspondant aux manœuvres qui ont eu des anomalies s’allumeront. La LED L1 indique le résultat
de la manœuvre la plus récente, la LED L8 indique le résultat de la huitième. Si la LED est allumée, cela signie que des anomalies se sont vériées
durant la manœuvre; si la LED est éteinte, cela signie que la manœuvre s’est terminée sans anomalies;
06.
Appuyer sur les touches «s» et «t» pour sélectionner la manœuvre désirée: la LED correspondante émet un nombre de clignotements égal au
nombre de clignotements normalement émis par le clignotant après une anomalie (voir tableau 19);
07. Relâcher la touche «Set».

13
FR
9.4 - Signalisations du clignotant
Si un clignotant (ou le clignotant à LED programmé comme clignotant) est branché sur la sortie FLASH de la logique de commande, pendant une manœuvre, il
clignotera toutes les secondes. En cas d'anomalie, le clignotant émet deux signaux séparés par une pause d'une seconde. Les mêmes signaux sont émis par le
clignotant à LED et la LED Bluebus. Le tableau 19 contient la cause et la solution pour chaque signal.
TABLEAU 19
Signalisation Cause Solution
1 clignotement
pause d’1 seconde
1 clignotement
Erreur sur le BlueBUS Le contrôle des dispositifs reliés au système Bluebus et réalisé au début
de la manœuvre ne correspond pas aux dispositifs mémorisés au cours
de la phase d'apprentissage. Il est possible que des appareils soient
endommagés. Il convient donc de les vérier et de les remplacer.
2 clignotements
pause d’1 seconde
2 clignotements
Intervention d’une photocellule Au début de la manœuvre, une ou plusieurs cellules n'autorisent pas le
mouvement. Vérier la présence d'obstacles ou si les cellules provoquent
des interférences au niveau de l'infrarouge.
3 clignotements
pause d’1 seconde
3 clignotements
Intervention du limiteur de la «Force
moteur»
Durant le mouvement, le portail a rencontré une friction plus forte; en
vérier la cause.
4 clignotements
pause d’1 seconde
4 clignotements
Intervention de l’entrée STOP Au début de la manoeuvre ou durant le mouvement, il y a eu une inter-
vention de l’entrée de STOP ; en vérier la cause.
5 clignotements
pause d’1 seconde
5 clignotements
Erreur dans les paramètres internes de la
logique de commande
Attendre au moins 30 secondes et réessayer de donner une commande;
si l’état persiste, il pourrait y avoir une panne grave et il faut remplacer la
carte électronique.
6 clignotements
pause d’1 seconde
6 clignotements
La limite maximum du nombre de ma-
nœuvres à l’heure a été dépassée
Attendre quelques minutes que le limiteur de manoeuvres retourne sous
la limite maximum.
7 clignotements
pause d’1 seconde
7 clignotements
Erreur dans les circuits électriques internes Déconnecter tous les circuits d’alimentation pendant quelques secondes
puis tenter de redonner une commande ; si l’état persiste, il pourrait y
avoir une panne grave et il faut remplacer la carte électronique.
8 clignotements
pause d’1 seconde
8 clignotements
Il y a déjà une commande qui ne permet pas
d’en exécuter d’autres.
Vérier la nature de la commande toujours présente ; par exemple, il peut
s’agir de la commande provenant d’une horloge sur l’entrée “ouverture”.
9.5 - Signalisations de la logique de commande
Les LED des bornes, connecteurs et touches de la logique de commande émettent des signaux particuliers associés au fonctionnement normal de l'appareil ou
en cas d'anomalies.
Le tableau 20 contient la cause et la solution pour chaque signal.
TABLEAU 20
LED des bornes sur la
logique de commande
Stop
Set
Close
Open
SCA
Flash
L1 L2 L3 L4 L5 L6 L7 L8
1.6A T
LED Bluebus Cause Solution
Éteinte Anomalie Vérier si l’alimentation est présente; vérier si les fusibles sont grillés;
si c’est le cas, vérier la cause de la panne et les remplacer par d’autres
de même valeur.
Allumée Anomalie grave Il y a une anomalie grave; essayer d'éteindre la logique pendant quelques
secondes. Si la situation persiste, il y a une panne et il faut remplacer la
carte électronique.
1 clignotement par seconde Tout est OK Fonctionnement normal de la logique de commande.
2 clignotements rapides Il y a eu une variation de l'état. C’est normal quand il y a un changement de l’une des entrées: PP, STOP,
OPEN, CLOSE, intervention des photocellules ou quand on utilise l'émet-
teur radio.
Série de clignotements
séparés par une pause
d'1seconde
Divers C'est la même signalisation que celle du clignotant (voir Tableau 19)
pause d’1 seconde
LED STOP Cause Solution
Éteinte Intervention de l’entrée STOP Vérier les dispositifs connectés à l’entrée STOP.
Allumée Tout est OK Entrée STOP active
LED PP Cause Solution
Éteinte Tout est OK Entrée PP non active

14
FR
Allumée Intervention de l’entrée PP C’est normal si le dispositif connecté à l’entrée PP est effectivement actif.
Solution
LED OPEN Cause
Éteinte Tout est OK Entrée OPEN non active
Allumée Intervention de l’entrée OPEN C’est normal si le dispositif connecté à l’entrée OPEN est effectivement
actif.
LED CLOSE Cause Solution
Éteinte Tout est OK Entrée CLOSE non active
Allumée Intervention de l’entrée CLOSE Normal si le dispositif relié à l'entrée CLOSE est actif
Témoin ALT Cause Solution
Éteinte Entrée ALT Vérier les dispositifs connectés à l'entrée ALT.
Allumée Tout est OK Entrée ALT active
TABLEAU 21
LED de programmation sur la logique de commande
LED 1 Description
Éteinte Durant le fonctionnement normal, elle indique que la fonction «Fermeture automatique» n'est pas active.
Allumée Durant le fonctionnement normal, elle indique que la fonction «Fermeture automatique» est active
Clignote • Programmation des fonctions en cours
• Si elle clignote en même temps que L2, cela signie qu'il faut procéder à la reconnaissance des dispositifs (voir paragraphe 4.3).
LED 2 Description
Éteinte Durant le fonctionnement normal, elle indique que la fonction «Fermeture immédiate après passage devant photocellule» n'est pas
active.
Allumée Durant le fonctionnement normal, elle indique que la fonction «Fermeture immédiate après passage devant photocellule» est active.
Clignote • Programmation des fonctions en cours
• Si elle clignote en même temps que L1, cela signie qu'il faut procéder à la reconnaissance des dispositifs (voir paragraphe 5.3).
LED 3 Description
Éteinte Durant le fonctionnement normal, elle indique que la fonction «Fermeture toujours» n'est pas active.
Allumée Durant le fonctionnement normal, elle indique que la fonction «Fermeture toujours» est active.
Clignote • Programmation des fonctions en cours
• Si elle clignote en même temps que L4, cela signie qu’il faut effectuer la reconnaissance de la longueur du vantail (voir paragraphe
«5.4 Reconnaissance des dispositifs»).
LED 4 Description
Éteinte Durant le fonctionnement normal, elle indique que la fonction «Stand-By» n'est pas active.
Allumée Durant le fonctionnement normal, elle indique que la fonction «Stand-By» est active.
Clignote • Programmation des fonctions en cours
• Si elle clignote en même temps que L3, cela signie qu’il faut effectuer la reconnaissance de la longueur du vantail (voir paragraphe
«5.4 Reconnaissance des dispositifs»).
LED 5 Description
Éteinte Durant le fonctionnement normal, elle indique que la fonction «Démarrage» est active.
Allumée Durant le fonctionnement normal, elle indique que la fonction «Démarrage» est active.
Clignote Programmation des fonctions en cours.
LED 6 Description
Éteinte Durant le fonctionnement normal, elle indique que la fonction «Préclignotement» n'est pas active.
Allumée Durant le fonctionnement normal, elle indique que la fonction «Préclignotement» est active.
Clignote Programmation des fonctions en cours.
LED 7 Description
Éteinte Durant le fonctionnement normal, elle indique que l’entrée FERMETURE active une manœuvre de fermeture.
Allumée Durant le fonctionnement normal, elle indique que l’entrée FERMETURE active une manœuvre d’ouverture partielle.
Clignote Programmation des fonctions en cours.
LED 8 Description
Éteinte Durant le fonctionnement normal, elle indique que RUN est conguré comme Master.
Allumée Durant le fonctionnement normal, elle indique que RUN est conguré comme Slave.
Clignote Programmation des fonctions en cours.

15
FR
CARACTÉRISTIQUES TECHNIQUES DU PRODUIT
AVERTISSEMENTS: • Toutes les caractéristiques techniques indiquées se réfèrent à une température ambiante de 20°C (± 5°C). • Nice S.p.a. se réserve le droit
d’apporter des modications au produit à tout moment si elle le juge nécessaire, en garantissant dans tous les cas les mêmes fonctions et le même type d’utilisation prévu.
Modèle type RUN400HS - RUN400HS/V1 RUN1200HS - RUN1200HS/V1
Typologie Opérateur électromécanique pour le mouvement automatique de portails coulissants pour usage industriel avec
logique électronique de commande
Pignon Nombre de dents 18; Module 4 *
Couple maximum au démarrage (cor-
respondant à la capacité de dévelop-
per une force pour mettre en mouve-
ment le vantail)
12,3 Nm
(340 N)
28,4 Nm
(790 N)
Couple nominal [correspond à la capa-
cité de développer la force nécessaire
pour maintenir en mouvement le vantail]
5,6 Nm
(157 N)
8,2 Nm
(320 N)
Vitesse (à vide) 42 m/min 22 m/min
Vitesse (au couple nominal) 32 m/min 19 m/min
Fréquence maximum des cycles de
fonctionnement (au couple nominal)
11 cycles/heure (264 cycles/jour), pour un portail
de 15m (égal à un cycle de 63%), (la logique de com-
mande limite les cycles au nombre maximum indiqué
dans les tableaux 2 et 3)**
7-8 cycles/heure (365 cycles/jour), pour un portail
de 15m (égal à un cycle de 63%), (la logique de com-
mande limite les cycles au nombre maximum indiqué
dans les tableaux 2 et 3)**
Temps maximum de fonctionnement
continu (au couple nominal)
40 minutes (la logique de commande limite le fonction-
nement continu aux valeurs limites indiquées dans les
tableaux 2 et 3)***
60 minutes (la logique de commande limite le fonction-
nement continu aux valeurs limites indiquées dans les
tableaux 2 et 3)***
Limites d’utilisation Généralement, RUN est en mesure d’automatiser des portails dont le poids ou la longueur correspondent aux
limites prévues dans les tableaux 2, 3 et 4
Durabilité Estimée entre 150000cycles et 450000cycles, suivant les conditions indiquées dans le Tableau 4
Alimentation RUN 400HS - 1200HS
Versione V1
230Vac (+10 % -15 %) 50Hz.
120Vac 50/60 Hz
Puissance maximum absorbée au
démarrage [consommation correspon-
dante en ampères]
510 W
(4,7 A)
550 W
(5,2 A)
Classe d’isolement 1 (la mise à la terre est nécessaire)
Sortie clignotant pour 2 clignotants LUCYB (Ampoule 12V, 21W).
Sortie S.C.A. pour 1 ampoule 24V maximum 4W (la tension de sortie peut varier de -30 à +50 % et peut commander égale-
ment des petits relais)
Sortie BLUEBUS une sortie avec charge maximum de 15unités BlueBus
Entrée STOP Pour les contacts normalement fermés, normalement ouverts ou à résistance constante de 8,2kΩ; en recon-
naissance automatique (une variation par rapport à l’état mémorisé provoque la commande «STOP»)
Entrée PP pour contacts normalement ouverts (la fermeture du contact provoque la commande P.P.)
Entrée OUVERTURE pour contacts normalement ouverts (la fermeture du contact provoque la commande OUVERTURE)
Entrée FERMETURE pour contacts normalement ouverts (la fermeture du contact provoque la commande FERMETURE)
Connecteur radio Connecteur SM pour récepteurs SMXI, SMXIS ou OXI
OXI Entrée ANTENNE Radio Entrée ANTENNE Radio 52Ω pour câble de type RG58 ou similaires
Fonctions programmables 8 fonctions de type ON-OFF et 8 fonctions réglables (voir tableaux 7 et 9)
Fonctions en auto-apprentissage Auto-apprentissage des dispositifs connectés à la sortie BlueBUS
Auto-apprentissage du type de dispositif de «STOP» (contact NO, NF ou résistance 8,2kΩ)
Auto-apprentissage de la longueur du portail et calcul des points de ralentissement et ouverture partielle.
Température de fonctionnement -20 °C ... 50 °C
Indice de protection IP 44
Dimensions et poids 400 x 255 h 390 mm; 24,5kg
* Un pignon à 12dents module 6 est disponible en option.
** À 50 °C et avec un portail de 15 mètres, la fréquence de fonctionnement maximum est de 7 cycles/heure (égal à un cycle de 40%).
*** À 50 °C, le temps maximum de fonctionnement continu est de 10 minutes.
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

III
FR
A
1 2
3 4
10
MANUEL D'UTILISATION (à remettre à l'utilisateur nal)
Avantd’utiliserpourlapremièrefoisl’automatisme,faites-vousexpliquerparl’installateurl’originedesrisquesrésiduelsetconsacrezquelques
minutes à la lecture de ce manuel. Conservez le manuel pour pouvoir le consulter pour n’importe quel doute futur et remettez-le à tout nou-
veaupropriétairedel’automatisme.
ATTENTION! – Votre automatisme est un équipement qui exécute dèlement vos commandes; toute utilisation inconsciente et
incorrecte peut entraîner des situations de danger:
- Ne commandez pas le mouvement de l’automatisme si des personnes, des animaux ou des objets se trouvent dans son rayon
d’action.
- Il est absolument interdit de toucher des parties de l’automatisme quand le portail est en mouvement!
- Les photocellules ne sont pas un dispositif de sécurité mais uniquement un dispositif auxiliaire à la sécurité. Elles sont
construites selon une technologie extrêmement able mais peuvent, dans des situations extrêmes, connaître des problèmes
de fonctionnement ou même tomber en panne; dans certains cas, la panne peut ne pas être immédiatement évidente. C'est
pourquoi il est indispensable de respecter les consignes suivantes lors de l'utilisation de l'automatisme:
- Le passage n'est autorisé que si le portail est complètement ouvert et à l'arrêt
- Il est absolument interdit de transiter pendant que le portail est en phase de fermeture!
- Vérier périodiquement le fonctionnement correct des photocellules et des systèmes de sécurité.
1 - Enfants:uneinstallationd'automatisationgarantitundegréde
sécuritéélevéenempêchantavecsessystèmesdedétectionlemou-
vementenprésencedepersonnesoud'objetsetengarantissantune
activationtoujoursprévisibleetsûre.Ilesttoutefoisprudentdenepas
laisserlesenfantsjoueràproximitédel'automatismeet,pouréviterles
activationsinvolontaires,denepaslaisseràleurportéelesémetteurs
quicommandentlamanœuvre:cen'estpasunjouet!
2
-Leproduitnepeutêtreutilisépardespersonnes(dontdesenfants)
dontlescapacitésphysiques,sensoriellesoumentalessontlimitées,
ounedisposantdel'expérienceoudesconnaissancesnécessaires,
àmoinsquecelles-ciaientbénécié,parl'entremised'unepersonne
responsable de leur sécurité, d'une surveillance ou d'instructions
quant à l'utilisation du produit.
3 - Anomalies: Si vous remarquez une anomalie quelconque dans le
fonctionnementdel’automatisme,coupezl’alimentationélectriquede
l’installationetprocédezaudébrayagemanuel.Netenteraucuneré-
paration,maisdemanderl'interventiond'uninstallateurdeconance:
enattendant,l'appareilpeutfonctionnersansêtreautomatisédèsque
l'opérateurauraétédébrayé commedécritparlasuite.En cas de
panne ou d'absence de courant,enattendantl'installateurouleré-
tablissementducourant,l'automatismepeutencoreêtreutilisé.Ilfaut
débloquermanuellementleréducteur(consulterlemanueldumoteur)
etdéplacermanuellementleportailcommeonlesouhaite.
4 - Commande avec sécurité hors d'usage: si les dispositifs de
sécuritédel'appareilnefonctionnentpascorrectement.Mieux vaut
commander le portail en mode « Homme mort » en procédant
commesuit:
01. Envoyer une commande pour actionner le portail, à l'aide d'un
émetteuroud'unsélecteuràclé,etc.Sitoutfonctionnecorrecte-
ment,leportailsedéplaceranormalement.Danslecascontraire,
procédercommesuit:
02. Dansles3secondes,réactiverlacommandeetlagarderactive;
03. Après2secondesenviron,leportailpasseraenmode«Homme
mort».Ilcontinueraàbougertantquelacommandeseraactivée.
IMPORTANT! – Si les dispositifs de sécurité sont hors service, il
est recommandé de faire appel à un technicien qualié dès que
possible pour effectuer la réparation.
5 - Mêmesivousvousensentezcapable, mieux vaut ne pas modi-
er l'installation ni les paramètres de programmation, voire les
réglages de l'automatisme:cetteresponsabilitéincombeàvotre
installateur.
6 - L'essaidefonctionnement,lesopérationsdemaintenancepério-
diqueetles éventuelles réparationsdoivent êtredocumentés par la
personne qui s'en charge et les documents doivent êtreconservés
parle propriétairedel'installation.Laseuleinterventionquel’utilisa-
teurpeuteffectueretquenousconseillonsdefairepériodiquementest
le nettoyage des verres des photocellules et de l’automatisme. Pour
empêcherquequelqu'unpuisseactionnerleportail,avantd'interve-
nir,n'oubliezpasdedébrayerl'automatisme(consulterlemanueldu
moteur)etd'utiliserpourlenettoyageuniquementunchiffonlégère-
mentimbibéd'eau.
7 - Mise au rebut:Àlandelavieutiledel'automatisme,assurez-
vousqueledémantèlementesteffectuépardupersonnelqualiéet
que les matériaux sont recyclés ou mis au rebut en respectant les
normes locales en vigueur.
8 - Débrayer et bloquer manuellement l'opérateur:l’opérateurest
munid’unsystèmededébrayagemécaniquequipermetd’ouvriretde
fermer manuellement le portail.
Cesopérationsmanuellesdoiventêtreeffectuéesencasdecoupure
decourantélectriqueoud’anomaliesdefonctionnementoulorsdes
phases d’installation.
01. Faire glisser le disque couvrant la serrure (phase 1 - g. A);
02.Insérerettournerlaclédanslesenshoraireettirerlapoignéede
débrayage(phases 2 et 3 - g. A);
03.Àcestade,ilestpossiblededéplacermanuellementlevantail
danslapositionsouhaitée(phase 4 - g. A).
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

IX
FR
ES
DÉCLARATION DE CONFORMITÉ CE et déclaration d'intégration de «quasi-machine»
DéclarationconformeauxDirectives:2014/30/UE(CEM);2006/42/CE(MD)AnnexeII,partieB
Numéro de déclaration: 500/RUN..HS Révision: 3 Langue: FR
Nom du fabricant: NICE s.p.a.
Adresse: ViaPezzaAlta13,Z.I.Rustignè,31046Oderzo(TV)Italie
Personne autorisée à constituer la documentation technique: NICE s.p.a.
Type de produit: Opérateurélectromécaniqueaveclogiquedecommandeincorporée
Modèle / Type: RUN1200HS,RUN400HS
Accessoires: ChargeurdebatteriesPS524,récepteursradiomodèlesSMXI,SMXISetONEXI
LesoussignéRobertoGriffaensaqualitédeChiefExecutiveOfcer,déclaresoussonentièreresponsabilitéqueleproduitindiquéci-dessusestconforme
auxdispositionsprescritesparlesdirectivessuivantes:
•DIRECTIVE2014/30/UEduPARLEMENTEUROPÉENETDUCONSEILdumercredi26février2014relativeàl’harmonisationdeslégislationsdesÉtats
membresconcernantlacompatibilitéélectromagnétique(refonte),selonlesnormesharmoniséessuivantes:
EN61000-6-2:2005,EN61000-6-3:2007+A1:2011
Enoutre,leproduits’avèreconformeàlaDirectiveci-aprèsselonlesconditionsessentiellesrequisespourles«quasi-machines»:
•Directive2006/42/CEduPARLEMENTEUROPÉENETDUCONSEILdu17mai2006relativeauxmachinesetmodiantlaDirective95/16/CE(refonte)
•Nousdéclaronsqueladocumentationtechniquepertinenteaétéélaboréeconformémentàl’AnnexeVIIBdelaDirective2006/42/CEetquelesconditionsessentiellesrequises
ci-aprèsontétérespectées:1.1-1.1.2-1.1.3-1.2.1-1.2.6-1.5.1-1.5.2-1.5.5-1.5.6-1.5.7-1.5.8-1.5.10-1.5.11
•Leproducteurs’engageàtransmettreauxautoritésnationales,enréponseàunedemandemotivée,lesrenseignementspertinentssurla«quasi-machine»,sanspréjudicede
sesdroitsdepropriétéintellectuelle.
•Sila«quasimachine»estmiseenservicedansunpayseuropéendontlalangueofcielleestautrequecelleemployéedanslaprésentedéclaration,l’importateurseratenu
d’accompagnerlaprésentedéclarationdelatraductioncorrespondante.
•Noussignalonsquela«quasimachine»nedevrapasêtremiseenservicetantquelamachinenaleàlaquelleelleseraincorporéen’aurapasété,s’ilyalieu,déclaréeàson
tour conforme aux dispositions de la Directive 2006/42/CE.
Enoutre,leproduits’avèreconformeauxnormessuivantes:EN60335-1:2002+A1:2004+A11:2004+A12:2006+A2:2006+A13:2008+A14:2010+
A15:2011,EN60335-2-103:2003+A11:2009
Leproduits’avèreconforme,limitativementauxpartiesapplicables,auxnormessuivantes:EN13241-1:2003+A1:2011,EN12445:2002,EN12453:2002,
EN 12978:2003+A1:2009
Oderzo,21Avril2016 Ing. Roberto Griffa
(Chief Executive Ofcer)
DECLARACIÓN DE CONFORMIDAD CE y declaración de incorporación de “cuasi máquina”
DeclaracióndeconformidadconlasDirectivas:2014/30/UE(CEM);2006/42/CE(DM),anexoII,parteB
Número de declaración: 500/RUN..HS Revisión: 3 Idioma: ES
Nombre fabricante: NICE s.p.a.
Dirección: ViaPezzaAlta13,Z.I.Rustignè,31046Oderzo(TV)Italia
Persona autorizada para elaborar la documentación técnica: NICE s.p.a.
Tipo de producto: Motorreductor electromecánico con central incorporada
Modelo / Tipo: RUN1200HS,RUN400HS
Accesorios: CargadordebateríasPS524,receptoresradiomod.SMXI,SMXISyONEXI
Elquesuscribe,RobertoGriffa,encalidaddeChiefExecutiveOfcer,declarabajosuresponsabilidadqueelproductoantedichoesconformealasdisposi-
ciones de las siguientes directivas:
•DIRECTIVA2014/30/UEDELPARLAMENTOEUROPEOYDELCONSEJOdel26defebrerode2014relativaalaarmonizacióndelasleyesdelosEstados
miembrossobrelacompatibilidadelectromagnética(refundición)segúnlassiguientesnormasarmonizadas:
EN61000-6-2:2005,EN61000-6-3:2007+A1:2011
Asimismo,elproductotambiéncumpleconlasiguienteDirectivadeconformidadconlosrequisitosprevistosparalas“cuasimáquinas”:
•Directiva2006/42/CEDELPARLAMENTOEUROPEOYDELCONSEJOde17demayode2006relativaalasmáquinasyquemodicalaDirectiva95/16/
CE (refundición)
•SedeclaraqueladocumentacióntécnicacorrespondientesehaelaboradodeconformidadconelanexoVIIBdelaDirectiva2006/42/CEyquesehanrespetadolossiguientes
requisitos fundamentales: 1.1- 1.1.2- 1.1.3- 1.2.1-1.2.6- 1.5.1-1.5.2- 1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11
•Elfabricantesecomprometearemitiralasautoridadesnacionales,previasolicitudjusticada,lainformaciónpertinenteacercadela“cuasimáquina”,sinperjudicarenningún
momento los propios derechos de propiedad intelectual.
•Encasodequela“cuasimáquina”sepongaenfuncionamientoenunpaíseuropeocuyalenguaocialdieradelaqueseutilizaenlapresentedeclaración,elimportadortiene
la obligación de asociar la traducción correspondiente a esta declaración.
•Seadviertequela“cuasimáquina”nodebeponerseenfuncionamientohastaque,siprocede,nosedeclarelaconformidadconlasdisposicionescontempladasenlaDirectiva
2006/42/CEdelamáquinanalenqueseráincorporada.
Elproductotambiéncumplecon lassiguientesnormas: EN 60335-1:2002+A1:2004 + A11:2004+A12:2006 +A2:2006+ A13:2008 +A14:2010+
A15:2011,EN60335-2-103:2003+A11:2009
Elproducto,conlimitaciónalaspartesaplicables,tambiéncumpleconlassiguientesnormas:EN13241-1:2003+A1:2011,EN12445:2002,EN12453:2002,
EN 12978:2003+A1:2009
Oderzo,21Abril2016 Ing. Roberto Griffa
(Chief Executive Ofcer)
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
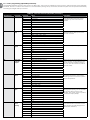 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
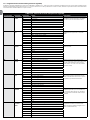 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
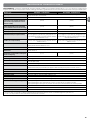 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
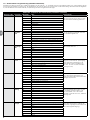 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
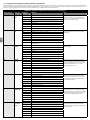 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132




































































































































Nice Automation Run Le manuel du propriétaire
- Catégorie
- Ouvre-porte
- Taper
- Le manuel du propriétaire
dans d''autres langues
- italiano: Nice Automation Run Manuale del proprietario
- English: Nice Automation Run Owner's manual
- español: Nice Automation Run El manual del propietario
- Deutsch: Nice Automation Run Bedienungsanleitung
- Nederlands: Nice Automation Run de handleiding
- polski: Nice Automation Run Instrukcja obsługi
Documents connexes
-
Nice Automation Manual for Moon / Moonclever MC824H Le manuel du propriétaire
-
Nice Automation ROBUS350 Le manuel du propriétaire
-
-
-
-
Nice Soon Le manuel du propriétaire
-
-
-
-