
1
FUZZY SMM
Piezo Kreisel mit Heading-Funktion für Flächenmodelle
Beschreibung
Wir freuen uns, daß Sie sich für den FUZZY SMM entschieden haben. Um die komplexe
Funktionsvielfalt genau zu verstehen, lesen Sie bitte diese Beschreibung komplett durch, bevor Sie mit
dem Betrieb beginnen. Für ganz Eilige gibt es auf den letzten beiden Seiten eine Kurz-Anleitung
Der Piezo-Kreisel FUZZY SMM dient der Stabilisierung von Flugmodellen. Der Kreisel erkennt durch
seine intelligente, selbstlernende Software mit Mikroprozessor-Elektronik und Piezo-Sensor jede
Bewegung des Modells um die Kreiselachse und erzeugt eine dieser Bewegung entgegengesetzte
Servostellung. Der Kreisel wird dazu lediglich zwischen das Steuerservo für diese Achse und dem
Empfänger angeschlossen. Es können auch Achsen stabilisiert werden, die mit 2 Servos gesteuert
werden. Die Wirkung kann in zwei Betriebsarten gewählt werden. MODE I entspricht einer Dämpfung
(Normal) der Drehbewegung. MODE II entspricht einer Haltewirkung (Heading) gegen
Drehbewegungen, die von außen auf ein Modell einwirken.
Die Ansprechempfindlichkeit des Kreisels kann mittels Zusatzkanal vom Sender aus frei gewählt und
damit dem Modell und dem Steuerempfinden des Piloten angepaßt werden. Außerdem wird mit dem
Empfindlichkeitskanal auch zwischen beiden Betriebsarten umgeschaltet, bzw. AUS und EIN-
geschaltet.
Der SMM-Sensor bietet gegenüber Piezo-Sensoren enorme Vorteile. Er ist völlig unempfindlich gegen
modelltypische Vibrationen, hat keine Temperaturdrift und ist mit einer sehr hohen Linearität bei
höchster Auflösung ausgestattet.
Die besten Ergebnisse werden bei Verwendung von schnellen Servos erzielt. Wir empfehlen
grundsätzlich die Verwendung von Futaba-Servos, da diese Servos optimal mit der schnellen
Signalaufbereitung des FUZZY SMM zusammenarbeiten. Servos anderer Hersteller können zum
leichten „knurren“ in der Nullstellung oder zu anderen Effekten neigen (Stromverbrauch).
Der FUZZY SMM kann für alle Flächenflugmodelle, sowohl Motormodelle als auch Segelflugmodelle,
zur Stabilisierung einer Flugmodellachse eingesetzt werden.
Grundlagen
Flugmodelle unterliegen während des Fluges ständig äußeren Einwirkungen, die sich in
Drehbewegungen äußern und ein Modell von der vorgesehenen Flugbahn abweichen lassen, z.B.
durch Windböen etc. Der FUZZY SMM erkennt dies und führt gegen jede von außen einwirkende
Drehbewegung eine entsprechende Gegensteuerbewegung über das Servo aus. Die Reaktionszeit ist
enorm schnell, viel schneller als jeder Pilot dies steuern könnte.
Im Normal-Modus (Mode I) wird gegen jede Drehbewegung wie ein „Stoßdämpfer“ (Mode I) gearbeitet,
z.B. bei Windböen.
Der FUZZY SMM besitzt eine zweite Betriebsart (Mode II), in dieser Betriebsart wirkt der
Steuerknüppelausschlag direkt auf den Kreisel, dieser steuert dann das Ruder bzw. Modell ohne
dämpfende Wirkung nach der Vorgabe des Steuerknüppels und hält dabei die vorgegebene
Drehgeschwindigkeit proportional zum Knüppelausschlag konstant.
Steuerbewegungen des Piloten führen auch zu Drehbewegungen, eine interne Ausblendung sorgt
jedoch dafür, daß vom Piloten gesteuerte Drehbewegungen nicht kompensiert werden.
Mode I, Normal
Betriebsart wie alle bisherigen Kreisel, arbeitet mit hoher Dämpfung auf dem jeweiligen Ruder, z.B. auf
Querruder eingesetzt, ob beim Start oder zur Landung, im Geradeausflug oder zum Thermik-Kreisen,
FUZZY SMM hält das Modell stabil, keine Bö kann die Landeeinteilung mehr stören, keine noch so
bockige Thermik kann das Modell aus der Bahn werfen. Für Thermikflüge wird zum Suchen der
FUZZY SMM abgeschaltet per Sender, sobald der „Bart“ gefunden ist, FUZZY SMM aktivieren und ab
geht’s nach oben im Zentrum vom Bart, herausfallen bei richtiger Anwendung (fast) unmöglich. Beim
Segler-Schlepp unentbehrlich auch für die Motormaschine, hält FUZZY SMM beide Modelle absolut
gerade und läßt keine abrupte Bewegungen über die Längsachse mehr zu. Auch auf dem Höhenruder
ergeben sich nicht gekannte Vorteile, z.B. springt kein Modell mehr bei der Landung, im Kunstflug
rastet das Modell regelrecht ein. Durch diese Eigenschaften steigt die Leistung des Modells, denn
insgesamt wird der Modellwiderstand, hervorgerufen durch Steuerausschläge der Ruder durch den
Piloten, geringer.
Mode II, Heading
Neue Betriebsart, empfohlen für alle Modelle mit Problemen beim Start, z.B. auf Seitenruder. Damit
wird ein Ausbrechen des Modells nicht nur verhindert, der Kurs wird in jedem Fall eingehalten. Mit der
Heading Funktion (engl. Kurs halten) wird das Modell in seine gedachte Richtung zurückgesteuert.
Diese eignet sich auch für alle andere Ruder, muß aber im Einzelfall ausprobiert werden.
Knüppelausschlag bewirkt eine Drehung des Modells um die stabilisierte Achse, die
Drehgeschwindigkeit ist immer proportional zum Knüppelausschlag. Der Knüppel steuert also die
Drehgeschwindigkeit des Modells, nicht mehr eine Richtung.
Bedienung
Einstell-Möglichkeiten
Der 4-Pol-DIP-Schalter dient der Einstellung der Parameter:
ON OFF
1
Ausgang 1, Servo-Richtung NORMAL Ausgang 1, Servorichtung REVERSE
2
HEADING Mode NORMAL Mode
3
Set Servo Limit NORMALbetrieb
4
Ausgang 2, Servo-Richtung NORMAL Ausgang 2, Servorichtung REVERSE
EIN-schalten: nach dem Einschalten des Empfängers/Kreisels, Modell nicht bewegen bis die LED
blinkt oder sich die Servos steuern lassen. Für einwandfreien Einschaltprozess nicht mehr als 80%
Empfindlichkeit einstellen, sonst wird dieser nicht beendet, die LED blinkt nicht. Im späteren Betrieb
kann die Empfindlichkeit bis 100% eingestellt werden.
Jedes verändern eines DIP-Switches wird erst nach AUS- und wieder EIN-schalten des Kreisels
wirksam. Vor dem Neu-EINschalten erst ca. 20-30 sec. Warten, erst dann sind neue
Schalterstellungen wirksam (Sicherheitseinrichtung Spannungsunterbrechung muß umgangen
werden).
DIP 1/4 - NORMAL/REVERSE
Polt die Ausgleichsrichtung des jeweiligen Servoausgangs um (s.u.). Die Stellung des DIP-Schalters
wird nur beim Einschalten eingelesen, spätere Verstellung ist ohne Funktion.
DIP 2 – NORMAL, NORMAL/HEADING
Mit diesem DIP-Switch kann gewählt werden, ob der Kreisel ausschließlich im Normal(Dämpfer)-
Modus oder wählbar zwischen Normal- und Heading-Modus (s.u.) arbeitet.
In Position ON von DIP-Schalter 2 stehen sowohl die NORMAL-Betriebsart (Mode I) als auch die
HEADING-Betriebsart (Mode II) zur Verfügung. Zwischen beiden Modi kann mit dem Gain-Kanal
(Schieberegler) gewählt werden. Die Wirkungsweise des GAIN-Kanals wird dazu derart geändert, daß
sich Empfindlichkeits-Minimum für beide Modi in der Mitte eines freien Kanals (Schieberegler oder
Schalter) befindet. Größere Werte auf eine Seite bewirken eine Aktivierung der HEADING-Funktion
(MODE II), bei Kanalmaximum wird 100% erreicht. Von Mitte zur anderen Seite wird der normale
Kreiselmodus (MODE I) in der Empfindlichkeit gesteuert. Zur Kontrolle für die Betriebsart ändert sich
die Blinkfrequenz der LED (s.u.). Die Stellung des DIP-Schalters wird nur beim Einschalten
eingelesen.
DIP 3 - Set Limits, Servo-Endlagenabgleich
Befindet sich dieser Schalter während des EIN-schaltens des Kreisels in Position ON, startet der
Servoendlagen-Abgleich (LED blinkt dauernd). Im Sender sollte keine Wegreduzierung oder
Differenzierung programmiert sein. Der am zu stabilisierenden Ruder mechanisch mögliche Servoweg
wird nun mit dem jeweiligen Steuerknüppel nach beiden Seiten abgefahren. Der mechanische Weg
sollte dabei nach beiden Seiten gleich groß sein, das Servo bzw. das Steuergestänge darf dabei an
keine mechanischen Anschläge laufen. Abgespeichert wird die erreichte Maximalposition des Knüppels
nach einer Seite. Eingestellt wird dabei der vom Kreisel gesteuerte Servoweg, nicht der Servoweg, der
am Sender gesteuert wird.
Ist der Weg eingelernt, DIP-Schalter in Position OFF bringen, damit wird der Weg abgespeichert. Nach
umlegen des DIP-Schalters in Position OFF bewegt sich das Servo zur Kontrolle nach
rechts - Mitte - links. Dieser Weg entspricht nun dem Weg, den das Servo bei vollem
Korrekturausschlag nach jeder Seite ausführen wird, der eingebaute Limiter verhindert dann, daß das
Servo mechanisch anläuft. Kreisel (Empfänger) ausschalten, wieder einschalten, der Kreisel befindet
sich wieder in Normalbetrieb. Die Stellung des DIP-Schalters wird nur beim Einschalten
eingelesen, spätere Verstellung ist ohne Funktion. Mit dieser Funktion sollten möglichst nur kleine
Korrekturen der Servoweg erfolgen (+/- 10%), die Qualität der Regelung könnte sonst negativ
beeinflußt werden.
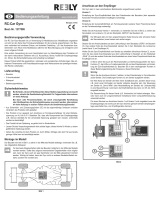
Ausgang 2
Output 2
Ausgang 1
Output 1
Man. Gain/Dynamic
Ausblendung
Stick fade out
DIP-Switch
1 2 3 4
Einstell-Potentiometer
Einsteller 1, Dynamik-Trimmer
Grundlage für Dynamikeinstellung: Ziel beim Fliegen mit Kreiseln ist, mit der maximal möglichen
Kreisel-Empfindlichkeit zu fliegen. Dann wird optimale Kreiselunterstützung bei größt möglicher
Steuerpräzision erreicht. Wird die Empfindlichkeit erhöht, wird sich das Modell ab einem bestimmten
Punkt aufschwingen, eine weitere Erhöhung der Empfindlichkeit beschleunigt das Aufschwingen. Der
Punkt, an dem das Aufschwingen beginnt, ist sehr stark von den mechanischen Faktoren im Modell
abhängig wie z.B. Reibung der Anlenkung, Kraft des Servos, Reproduzierbarkeit der Servopositionen
und vor allem von der Geschwindigkeit des verwendeten Servos. Der Dynamik-Regler ermöglicht nun,
den Kreisel in etwa auf die vorhandenen mechanischen Gegebenheiten einzustellen. Wird der Regler
aus der Mitte heraus auf die ungünstige Seite verdreht, schwingt sich das Modell noch stärker auf.
Dreht man den Regler zur richtigen Seite (abhängig von den mechanischen Gegebenheiten), kann
man die Empfindlichkeit nun weiter aufdrehen und damit das Kreiselergebnis nochmals verbessern.
Drehung nach links = weicher, Drehung nach rechts = härter.
Bei Kreiselbetrieb in MODE I (NORMAL) liegt in Mittelstellung eine neutrale Einstellung vor, nach links
wird die „Einrastwirkung“ weicher, nach rechts härter. Bei Aufschwingen des Modells, Trimmer in
Richtung weich drehen.
Im Mode II, (HEADING) beeinflußt der Trimmer die Ausregelgeschwindigkeit und die Positions-
Haltepräzision von weich bis hart.
Einsteller 2, Ausblendpunkt
Mit diesem Einsteller kann eingestellt werden, an welchem Punkt des Knüppelausschlags die Wirkung
des Kreisels abgeschaltet ist (intelligente Ausblendung, s.u.). Die Einstellung kann gewählt werden
zwischen 20% und 100% des Knüppelwegs.
Die Wirkung der Potis erfolgt immer etwas verzögert, also beim Test nach erfolgter Verstellung etwas
abwarten.
LED-Monitor
Nach dem Einschaltabgleich:
Kein Blinken Empfindlichkeit=0, Kreisel abgeschaltet
X-X-X Gain Kanal nicht belegt, man. Gain aktiv
XX-XX-XX Betriebsart Modus 1, Normal, alles OK
XXX-XXX-XXX Betriebsart Modus II, Heading, alles OK
Blinkt die LED 4 oder 5 mal schnell, kann der Kreisel nicht betrieben werden. In diesem Fall liegt eine
nicht wiederherstellbare Veränderung des Piezo-Sensors vor, sei es durch Vibration, Alterung usw.

2
0%
0%
10%
20%
20%
20%
30%
40%
40%
40%
50%
60%
60%
60%
70%
80%
80%
80%
90%
100%
100%
100%
Schiebereglerwirkung
MODE1
MODE2
HEADING
NORMAL
Eine Sicherheitsroutine beim Einschalten sorgt dann dafür, daß der Kreisel nicht in Betrieb geht.
Somit wird ein Ausfall wegen Elementveränderungen im Flug verhindert = hohe Sicherheit.
Intelligente Ausblendung Natürlich erkennt der Kreisel auch vom Piloten gesteuerten Drehungen um
die stabilisierte Achse. Ohne intelligente Ausblendung würde er daher versuchen, auch diese
Drehbewegungen zu kompensieren, was das Steuergefühl für das Modell völlig verändern würde.
Der FUZZY SMM wird in diesem Fall durch eine eingebaute Ausblendung vom Knüppel
ausgeblendet. Bei einem zwischen 20% und 100% einstellbaren Knüppelausschlag (Poti 2) nach einer
Seite ist die Wirkung des FUZZY SMM zu 100% unterdrückt. Diese Ausblendung arbeitet intelligent, es
geht keine Mischfunktion verloren, z.B. Querruderdifferenzierung, Flaperon, Butterfly usw. Die
intelligente Ausblendung erkennt bei gemischten Funktionen, ob die stabilisierte- oder nur die
gemischte Funktion betätigt wird.
Empfindlichkeitseinstellung vom Sender aus
Durch den Zusatzkanal kann der FUZZY SMM während des Betriebs AN- oder AB-geschaltet bzw.
stufenlos in der Empfindlichkeit geregelt werden zwischen 0% und 100%.
Dadurch kann der FUZZY SMM zum Suchen der Thermik abgeschaltet werden, denn mit
eingeschaltetem FUZZY SMM kann u.U. am Modellverhalten die Thermik nicht mehr erkannt werden.
Die gegenüber herkömmlichen Flächenkreiseln weitaus erhöhte Empfindlichkeit sorgt auch für
ausreichende Stabilisierung für Modelle mit großer Spannweite oder hoher Masse.
Bei kleineren Modellen kann die Empfindlichkeitsregelung dadurch jedoch u.U. etwas schwierig sein,
weil die max. mögliche Empfindlichkeit schon nach relativ geringem Schiebereglerweg erreicht wird. In
diesem Fall hilft dann die Wegreduzierung im Sender. Einfach für den Empfindlichkeitskanal eine
Wegreduzierung programmieren, dadurch wird die Wirkung gespreizt, und die Empfindlichkeit läßt sich
gefühlvoller einstellen.
Manuelle Empfindlichkeitseinstellung, Kann aus „Kanalmangel“ die Empfindlichkeitsregelung (Gain-
Kanal) nicht am Empfänger angeschlosssen werden, kann die Empfindlichkeit auch an einem Poti (Poti
1) eingestellt werden.
Zwei Servo-Ein- und Ausgänge
FUZZY SMM kann eingesetzt werden für alle Achsen, die mit zwei Servos angesteuert werden, z.B.
bei Kunstflugmodellen mit zwei (oder einem) Höhenruder- oder Querruderservo, aber auch für alle
Achsen, die mit einem Servo angesteuert werden, z.B. die Hochachse (Seitenruder).
Gehäuse
Durch die Flachbauweise, geringe Gehäusegröße und das geringe Gewicht kann der Fuzzy-pro auch
in kleinen Modellen eingesetzt werden.
Einbau
Der Sensor des Kreisels muß so eingebaut
werden, daß die Kreiselachse und die
gewünschte zu stabilisierende Achse des
Modells (Längsachse=Querruder,
Hochachse=Seitennruder,
Querachse=Höhenruder) identisch sind (s.
Bild). Die Sensor-Achse läuft von oben durch
das Sensor-Gehäuse. Die Montage im Modell
muß daher so erfolgen, dass der Boden des
Sensorgehäuses genau 90Grad zur gewollten
Achse montiert wird. Wir empfehlen die
Befestigung des Sensors mit beiliegendem
Doppelklebeband. Kreisel-Sensor mit dem
Gehäuseboden auf die vorgesehene Stelle im
Modell kleben.
Die Erfahrung zeigt, daß der Kreisel-Sensor möglichst an einer Stelle des Modells weit weg vom
Motoren montiert werden sollte, da das Sensor-Element selbst Motorvibrationen als Bewegung mißt
und an das Servo weitergibt und verstärkt, dies würde zu erheblichem Servozittern führen. Am besten
ist eine stabile Stelle im Modell, solange diese sich nicht verbiegt oder schwingt. Durch die hohe
Auflösung des Sensors wird das verwendete Servo sehr häufig angesteuert, was zu höherem
Servoverschleiß führen kann. Das beste Kreiselergebnis wird natürlich mit schnellen Servos erzielt.
Das Elektronik-Gehäuse des Kreisels kann an einer geeigneten Stelle in der Mechanik eingebaut
werden. Auch hier auf vibrationsfreie Lagerung achten, am Besten in Schaumgummi
einpacken.werden.
Anschluß
Stecker und Buchse des Kreisels entsprechen dem Stecksystem JR/Futaba. Es muß lediglich darauf
geachtet werden, daß die Impulsseiten der Stecker auch am Empfänger entsprechend eingesteckt
sind, ebenso der Servostecker in der Buchse des Kreisels. Bei Verpolung entsteht kein Defekt, es stellt
sich lediglich kein Betrieb der Stecker und Buchsen (s. Bild).
Kabelfarben der Stecksysteme:
System Plus (+) Minus (-) Impuls
Graupner rot braun orange
Futaba rot schwarz weiß
MPX rot schwarz gelb
Zunächst ist empfohlen, alle Anschlüsse für die stabilisierte Achse/Funktion
ohne FUZZY SMM vorzunehmen und Sender und Servopolung so einstellen, daß alle Funktionen
sinnrichtig arbeiten ntfällt bei bereits geflogenen Modell).
Dann FUZZY SMM zwischen das(die) vorhandene Servo (Servos) der zu stabilisierenden Achse und
dem Empfänger anschließen. Dazu Servokabel des Servos für die zu stabi-lisierende Achse am
Empfänger abziehen und auf der Steckbuchse 1 des FUZZY SMM ein-stecken. Impulslitze/Polung des
Servokabels (Futaba weiß, JR orange, MPX gelb) immer so wie das direkt darunter liegende
Ausgangskabel. Das Servokabel 1 (steckt bei Lieferung in Steckbuchse 1) vom FUZZY SMM in den
am Empfänger frei gewordenen Servo-Ausgang stecken. Servokabel vom FUZZY SMM für die
Empfindlichkeit (Kabel mit Markierung gelb) in einen freien Kanal (Schieberegler- oder
Schalterfunktion) am Empfänger stecken.
Ist ein 2tes (Querruder)Servo vorhanden, dieses in Ausgang 2 des FUZZY SMM stecken, zugehöriges
Kabel in den zweiten Empfängerausgang für diese Funktion stecken. Wird der FUZZY SMM mit nur
einem Servo betrieben, immer Ausgang 1 benutzen und auch nur das zugehörige Servokabel an den
Empfänger anschließen (s.u.). Übriges Kabel von Steckbuchse 2 im Rumpf verlegen, nicht im FUZZY
SMM stecken lassen. Ist kein freier Kanal für die Empfindlichkeitseinstellung vom FUZZY SMM am
Empfänger vorhanden, kann dieser, auch ohne dieses Kabel einzustecken, betrieben werden, die
Empfindlichkeit kann dann am Poti neben den DIP-Schaltern eingestellt werden.
ACHTUNG, generell gilt: Zusätzliche Kabel könnten die Reichweite verändern, deshalb vor dem Flug
Reichweitentest durchführen. Eventuell Kabel anders verlegen und neu testen.
WICHTIG!!!!
- Einstellen der Wirkungs-Richtung und der intelligenten Ausblendung
Zunächst muß die Servolaufrichtung des zu stabilisierenden Ruders ohne Kreisel sinnrichtig eingestellt
werden. Dazu Kreisel ausschalten (Empfindlichkeit 0). Ein Knüppelausschlag z.B. nach links, muß
auch einen Servo/Ruderausschlag erzeugen, der das Modell entsprechend nach links steuert.
Empfindlichkeit des Kreisels am Sender (am besten im Normal Modus) auf 100% stellen.
Achtung, wichtig: Die Wirkungs-Richtung des Kreisels muß nun so eingestellt werden, daß das
angeschlossene Servo bei einer Drehung des Modells nach rechts das Ruder so ansteuert, daß eine
Gegensteuerbewegung nach links entsteht. Ist das Gegenteil der Fall, wird die Drehbewegung des
Modells bei Steuerung nach links nicht gedämpft, sondern zusätzlich beschleunigt. Die Drehbewegung
läßt sich dann u. U. nicht mehr stoppen, was letztlich zur Zerstörung des Modells führen kann.
Ausblendung kontrollieren
Bei Knüppelausschlag muß die Wirkung des Kreisels kontinuierlich reduziert werden, je nach
Einstellung des Potis. Erfolgt die Ausblendung bei gemischten Ausschlägen (Flaperon etc.), müssen
die Stecker des FUZZY SMM am Empfängerausgang getauscht (Ausgangskabel 1 entspricht nicht
Steckbuchse 1) und die vorstehenden Kontrollen erneut durchgeführt werden.
Da die Gegensteuerbewegung vom Kreisel immer nur so lange anhält, solange auch eine
Drehbewegung vorliegt, kann dies u.U. schwierig zu erkennen sein. Test z.B. bei Querruder dadurch,
daß das Modell auf die Nase gestellt wird und man sich zusammen mit dem Modell dreht und die
Querruder beobachtet.
Umpolen der Wirkungsrichtung:
Ist die Ausgleichsrichtung falsch, erfolgt die Umpolung der Wirkungs-Richtung mit umschalten von DIP-
1/4. Alle Tests wiederholen.
Betrieb ausschließlich in MODE I (DIP2 Position OFF)
Ist alles richtig eingebaut, angeschlossen und die Wirkungsrichtung getestet, kann der erste Einsatz
erfolgen. Nach EINschalten der Empfangsanlage die folgenden 3-5 Sekunden das Modell nicht
bewegen, die Elektronik des Kreisels führt in dieser Zeit einen Selbstabgleich durch. Die
angeschlossenen Servos führen in dieser Zeit eventuell kleine Ausschläge ohne Kraft durch. Ein
gleichmäßiges blinken der LED (s.o.) zeigt dann die Betriebsbereitschaft des Kreisels an,
angeschlossene Servos bewegen sich wieder in die Nullstellung zurück.
Mit einem freien Proportional-Schiebereglerkanal oder Schaltkanal am Sender kann die Wirkung
(Empfindlichkeit) des Kreisels eingestellt werden. Dabei läßt sich die Wirkung von 0% bis 100%
einstellen. Dafür wird die Verstellnorm von Futaba-Fernsteuerungen zu Grunde gelegt. Für die ersten
Versuche im Flug empfiehlt sich eine Einstellung von etwa 30-40% Empfindlichkeit.
Im Flug dann zunächst Empfindlichkeit solange erhöhen, bis das Modell beginnt um die stabilisierte
Achse zu schwingen, dann wieder geringfügig weniger Empfindlichkeit einstellen, eventuell
Emfindlichkeitseinstellung per Programmierung am Sender dem jeweiligen Flugzustand anpassen. Ist
der richtige Punkt der Empfindlichkeitseinstellung gefunden, kann noch die Dynamik-Einstellung
erfolgen (s.o.)
Betrieb in NORMAL+HEADING (DIP2 Position ON)
In dieser Betriebsart wird das
Kreiselsignal so ausgewertet, daß
der rückführende Servoausschlag
solange anhält, bis die
ursprüngliche Position wieder
eingenommen wird
(HEADING=Kurs halten). Solange
keine Steuerbewegung des Piloten
anliegt, wird das Modell, z.B. bei
Seitenruderstabilisierung, auf Kurs
gehalten, als ob links und rechts
vom Heck je eine harte Feder
angebracht wäre, die das Heck
festhält. Dadurch bleibt das Heck
immer in Position, das Modell bleibt
absolut richtungsstabil, Wegdrehen
ist nicht mehr möglich, es liegt
somit eine echte Lageregelung der
Hochachse vor.
Als Lageposition wird die Lage angenommen, die beim Einschalten des Kreisels, beim
Einschalten der HEADING-Funktion (Umschaltung von NORMAL auf HEADING-Betrieb) vorlag,
oder die Lage/Position/Richtung, die nach Loslassen des Steuerknüppels (Knüppel in
Mittelstellung) neu eingenommen wurde.
Im HEADING Betrieb (MODE II, DIP 2 in Position ON), wird nun die Wirkungsweise des
Empfindlichkeitskanals derart geändert, daß sich Empfindlichkeits-Minimum in der Mitte eines freien
Kanals (Schieberegler oder Schalter) befindet. Größere Werte auf eine Seite bewirken eine Aktivierung
der HEADING-Funktion (MODE II), bei Kanalmaximum wird 100% erreicht. Von Mitte zur anderen
Seite wird der normale Kreiselmodus (MODE I) in der Empfindlichkeit gesteuert. Grundsätzlich
+
+
+
-
-
-
Servostecker
(Draufsicht)
Futaba Graupner/JR Multiplex
Drehachse/Axis
SMM-Sensor Boden
Empfänger
Receiver
Recepteur
Markierung
Mark yellow
Marqauge
(S) = Signal
(S) = Signal
Ausgang 2
Output 2
Ausgang 2
Output 2
Ausgang 1
Output 1
Ausgang 1
Output 1
1
2
Frontansicht
Front view
A
ileron
servo 2
A
ileron
servo 1
SMM-Sensor

3
empfehlen wir, den Kreisel zunächst im NORMAL-Betrieb (MODE I, s.o.) zu fliegen und die
richtige Empfindlichkeitseinstellung damit zu ermitteln.
Die Umschaltung auf den HEADING Betrieb erfolgt über den Empfindlichkeitskanal. Dieser wird dabei
entweder von Hand auf die gewünschte Position auf der HEADING-Seite gebracht oder per Schalter
geschaltet. Am einfachsten ist dabei die Verwendung eines 3-Stufenschalters, der den
Empfindlichkeitskanal und/oder den Flugzustand umschaltet.
In der neuen Version V2 wird beim Umschalten von NORMAL auf Heading die Trimmstellung
des Knüppels automatisch als 0-Stellung für Heading übernommen.
Ist alles perfekt abgestimmt, kann jetzt noch mit dem Dynamik-Trimmer versucht werden, die maximal
mögliche Empfindlichkeit weiter zu erhöhen. Vorsichtig aus Stellung „Mitte“ heraus nach einer Seite
verdrehen und vorgehen wie unter „Dynamik-Trimmer“ beschrieben. Die höchst mögliche
Empfindlichkeitseinstellung ist die Beste.
Achtung! Soll die Aktivierung von MODE II am Boden erfolgen, z.B. beim Start für das Seitenruder,
dann empfehlen wir, das Modell erst in Mode I an den Start zu rollen, auf den gewünschten Kurs
auszurichten und dann erst Mode II kurz vor dem Start zu aktivieren.
Dieses Vorgehen ist deshalb notwendig, weil als Lageposition immer die Lage angenommen
wird, die beim Einschalten des Kreisels, usw. .......(s.o.)
Ohne dieses Vorgehen könnte es also passieren, daß der Kreisel das Modell in die Richtung
steuert, die beim Einschalten vorlag.
Für die ersten Heading Versuche empfiehlt sich eine Einstellung von etwa 20-30% HEADING-
Empfindlichkeit oder die bereits für den NORMAL-Modus (MODE I) erflogene Empfindlichkeit. Auch
hier gilt wieder, daß für optimale Ergebnisse mit der größt möglichen Empfindlichkeit geflogen werden
sollte, auch hier ist ein Aufschwingen des Modells die Anzeige dafür, daß die Empfindlichkeit zu hoch
eingestellt ist. Im HEADING-Betrieb dann zunächst Empfindlichkeit solange erhöhen, bis das Modell zu
schwingen beginnt, dann wieder geringfügig weniger Empfindlichkeit einstellen, eventuell
Empfindlichkeitseinstellung per Programmierung am Sender dem jeweiligen Flugzustand anpassen,
am angenehmsten ist eine Einstellung des Senders, bei der die Umschaltung von Mode I nach Mode II
und die Empfindlichkeitseinstellung nur mit einem Schalter erfolgt.
WICHTIG: Im HEADING Betrieb dürfen keine Mischer für die stabilisierte Funktion im Sender aktiviert
sein, Steuer-Eingaben von anderen ,zu gemischten Funktionen würden sonst als Steuerbewegung für
das Modell erkannt und zu einer Steuerbewegung des Kreiselservos führen. Bei Umschaltung auf
HEADING-Betrieb müssen daher alle Mischer für die stabilisierte Achse im Sender automatisch
abgeschaltet werden. Werden Trimmstellungen für die stabilisierte Funktion von Flugzustand zu
Flugzustand umgeschaltet, darf dafür keine Verzögerung der Umschaltung programmiert sein im
Sender.
Außerdem steht im Prinzip im HEADING-Mode keine Mittentrimmung der stabilisierten Funktion zur
Verfügung, denn auch Trimm-Auschläge werden als Steuerausschläge erkannt und in
Drehbewegungen des Modells umgesetzt. D.h., das Modell muß im NORMAL-Modus (Mode I)
ausgetrimmt werden, bei Umschaltung auf HEADING werden dann die jeweiligen
Trimmungsstellungen übernommen. Trimmen im HEADING-Betrieb ergibt Drehung des Modells.
Läßt sich für HEADING-Betrieb und NORMAL-Betrieb keine gemeinsame Trimmstellung erzielen, d.h.
das Modell dreht bei HEADING leicht weg, Trimmung für HEADING einstellen (Modelldrehung gleich
0) und im Sender abspeichern, dann Modell im NORMAL Mode betreiben und Nullstellung des Ruders
mechanisch verändern, bis das Modell in beiden Betriebsarten bei gleicher Trimmstellung in die
gewünschte Richtung fliegt.
Achtung: Die Wirkungsweise der Stabilisierung im HEADING-Betrieb kann gewöhnungsbedürftig sein.
Jetzt muß die stabilisierte Achse , vor allem beim Seitenruder, in jeder Kurve richtig mitgesteuert
werden, die HEADING Funktion hält sonst die Position des Rumpfes immer gleich. Sobald der Knüppel
wieder losgelassen wird, hält der Kreisel die neue Richtung des Rumpfes (Hochachse) fest, solange,
bis wieder Steuereingaben erfolgen. Durch die besonderen Regeleigenschaften wird in MODE II einem
bestimmten Knüppelausschlag eine konstante Drehgeschwindigkeit des Modells zugeordnet, soweit
die Ruderwirksamkeit dies erlaubt.
Eine bei manchen Sendern mögliche Reduzierung der Trimmwirkung/Trimmweg erhöht den Komfort
für HEADING erheblich und erlaubt ein feinfühligeres Trimmen im HEADING-Betrieb.
Schritt für Schritt, Schnell-Anleitung
Betrieb in Mode I (DIP-Schalter 2 in Position OFF)
1. Kreisel in Hubschrauber einbauen und anschließen wie beschrieben. Dabei für die ersten
Versuche den Empfindlichkeitskanal auf einen freien Schieberegler legen. Auf die richtige
Ausgleichsrichtung achten. Eventuell mit DIP-Schalter 1oder 4 umpolen.
2. Im Sender die Grundeinstellungen programmieren.
3. Servowege im Kreisel abspeichern mit DIP-Schalter 1 in Position ON. Dabei Steuer-Knüppel
betätigen und möglichen mechanischen Weg am Ruder abfahren und einlernen.
4. Zunächst beide Potis in Mittelstellung.
5. Für die ersten Flugversuche Empfindlichkeitseinstellung am Schieberegler auf ca. 30-40%
stellen. Danach Empfindlichkeitseinstellung langsam solange erhöhen, bis sich das Modell
leicht aufschwingt, dann Empfindlichkeit wieder leicht zurücknehmen. Eventuell noch mit
Dynamik-Trimmer die Empfindlichkeit weiter erhöhen (s. Dynamik-Trimmer).
Betrieb mit Mode II (DIP-Schalter 2 in Position ON)
Heading-Betrieb ist etwas aufwendiger und sollte deshalb „mental“ vorbereitet werden.
1. Kreisel in Modell einbauen und anschließen wie beschrieben. Auf die richtige
Ausgleichsrichtung achten. Eventuell mit DIP-Schalter 1/4 umpolen.
2. Modell fliegen, zunächst in NORMAL-Mode und dabei austrimmen, so daß die Trimmeinstellung
für die Funktion weitestgehend in der Mitte des Trimmwegs liegt.
3. Im Sender die Grundeinstellungen für HEADING programmieren, wie z.B.,
Empfindlichkeitskanal für HEADING (s. Grundsätzliche Einstellungen Sender), Flugzustands-
Umschaltung, Expo-Kurve für Funktion usw.
4. Zunächst beide Potis in Mittelstellung.
5. Für die ersten Flugversuche Empfindlichkeits-Kanal-Einstellung mit Servowegeinstellung im
Sender für beide Betriebsarten auf ca. 60-70% stellen (Weg reduzieren), oder Schieberegler-
Weg einseitig so reduzieren, daß der Schieberegler im Notfall auf ein Seite geschoben wird und
dort der Kreisel völlig ohne Funktion ist. So wird für „Notfälle“ eine sichere Schiebereglerposition
programmiert.
6. Modell zunächst in NORMAL Mode fliegen. In dieser Betriebsart die beste
Empfindlichkeitseinstellung mittels Wegeinstellung für den Empfindlichkeitskanal einstellen.
Modell so austrimmen, daß sich (mit dem normalen Trimmweg) das Modell nicht wegdreht.
7. Ist alles richtig eingestellt, im Flug umschalten (am besten per Flugzustandsumschaltung) auf
HEADING. Jetzt beste Empfindlichkeitseinstellung einstellen mit der Wegeinstellung für diese
Seite des Empfindlichkeitskanals im Sender. Werte langsam solange erhöhen, bis sich das
Modell leicht aufschwingt, dann Empfindlichkeit wieder leicht zurücknehmen. Eventuell noch mit
Dynamik-Trimmer die Empfindlichkeitseinstellung optimieren.
8. Empfindlichkeitseinstellungen perfektionieren für beide Betriebsarten.
Achtung !
Eventuell ist im HEADING Betrieb im Stand ein Driften des Servos bis hin zum Endausschlag
festzustellen. Dies ist normal und kein Fehler. Jeder Sender sendet auch im Nullpunkt immer ganz
kleine Ausschläge (Jitter), die selbst das beste Servo nicht erkennt. Der hochauflösende FUZZY SMM
erkennt selbst diese kleinen Ausschläge als Steuerbefehl. Da sich das Modell aber nicht dabei dreht
bzw. dem „Steuerbefehl“ nicht folgt, läuft eben das Servo langsam bis zum Endausschlag. Im Betrieb
ist dies ohne Bedeutung, da sich dann das Modell bewegt.
Tips für HEADING-Betrieb:
Erscheint die Steuerung des Modells im HEADING-Betrieb zu direkt, kann eine Expo-Kurve
programmiert werden, die die Ausschläge um den Neutralpunkt des Knüppels verringert.
Alle Ein- und Verstellungen am Modell und Kreisel sind nur dann sinnvoll, wenn der Pilot soviel
Flugerfahrung besitzt, daß er Ursache und Wirkung unterscheiden kann. Modelle, die mit
Normalkreiseln gut fliegen, können im HEADING-Betrieb ganz unterschiedliche Flugleistungen haben.
Alle Komponenten, die Mechanik und der Pilot müssen für die Flugfiguren, die mit HEADING möglich
sind, optimiert und die entsprechenden Einstellungen, Kenntnisse und Ruderwirkungen müssen
vorhanden sein.
Sicherheitshinweise
Trotz aller helfender Unterstützung des Kreisels setzt das Steuern eines Flugmodells, gewisse
Fertigkeiten voraus, die der Kreisel nicht ersetzen kann. Das bedeutet, daß sich der Anwender
vorsichtig und verantwortungsvoll an die Funktionen des Modells und des Kreisels herantasten muß.
Die Verantwortung für den sicheren Betrieb des Modells liegt immer beim Piloten, es empfiehlt sich
daher bei Einsteigern immer die Hilfe eines erfahrenen Piloten für die ersten Einstellungen und Flüge.
An dieser Stelle sei nochmals speziell an die richtige Einstellung der Wirkungsrichtung erinnert.
Technische Daten
• Größe ca. 48mmx39mmx15mm
• Gewicht ca. 30Gramm
• Betriebsspannung 3,0 ... 8 Volt
• Stromaufnahme 50mA @ 5V
• Temperaturbereich -10° - +50° C
• Drehsensor verschleißfreie Piezo-Keramik
• Signalauflösung Servokanäle 2000 Schritte
• Signalauflösung GAIN 256 Schritte
• Signalauflösung Sensor 4096 Schritte, 4-fach oversampling
• Steuersystem 8-bit Mikrokontroller 22MHz, mit 32bit Festkommaregelkreisen
• NORMAL/REVERSE-Schalter
• Dynamikregelung
• Manuelle Ausblendungs-Einstellung
• Direkt einlernbare Servoend- und Mittelstellungen
• HEADING-Funktion (Headding HEADING) als Positionsverriegelung mit weichen Übergängen
und Funktionskontrolle (LED)
• Notbetrieb auch ohne Eingangssignale
Francais
FUZZY SMM
Piezo le gyroavec la fonction de Heading pour des modèles de vole
Description
Nous nous réjouissons que vous vous ayez pour FUZZY SMM incontestablement. Pour comprendre
exactement la diversité de fonction complexe, lisez s'il vous plaît cette description complètement avant
que vous commenciez par l'utilisage.
Le gyro de Piezo FUZZY SMM sert à la stabilisation des modèles de vol. Le gyro reconnaît par son
logiciel intelligent, avec l'électronique de microprocesseur et le détecteur de Piezo chaque mouvement
du modèle autour de l'axe de gyro et produit l'un de ce mouvement lde Servo opposé. Le gyro est
branchée en plus purement entre servo pour cet axe et le récepteur. Les axes qui sont conduits avec 2
Servos peuvent aussi être stabilisés. L'effet peut être choisi dans deux modes d'opération. Le MODE I
correspond à un amortissement (Normalement) au mouvement d'idée. Le MODE II correspond à un
effet d'appui (Heading) contre des mouvements d'idée qui influent du dehors sur un modèle.
Le détecteur SMM offre les avantages énormes en face des détecteurs de Piezo. Il est complètement
insensible aux vibrations typiques pour le modèle, n'a aucune dérive de température et est équipé d'un
très haut Linearität à la plus haute résolution.
La sensitivité de le gyro peut être choisi librement au moyen du canal supplémentaire de l'émetteur et
être adapté avec cela au modèle et à la sensation d'impôt du pilote. En outre, est commuté avec le
canal de sensibilité aussi entre les deux modes d'opération, ou DE et Est tourné le commutateur par.
Les résultats les meilleurs sont obtenus lors de l'application par Servos rapides. Nous recommandons
fondamentalement l'application de Futaba-Servos, puisque ces Servos collaborent de manière
optimale avec le traitement de signal rapide de FUZZY SMMo. Servos des autres fabricants peuvent
"grogner" au léger dans la 2 position ou aux autres effets inclinent la (consommation de courant).
FUZZY SMM peut être mis pour tous les modèles de vol de surfaces, des modèles de moteur et aussi
modèles de vol de voile, à la stabilisation d'un axe de modèle de vol.
Bases
Des modèles de vol succombent pendant le vol aux influences continuellement extérieures qui p être
exprimé dans des mouvements d'idée et s'écartées un modèle de la trajectoire prévue, par exemple,
par des rafales de vent etc. FUZZY SMM le reconnaît et exporte un mouvement de contre-impôt
correspondant sur Servo contre chaque mouvement d'idée influant du dehors. Le temps de réaction
est énormément rapide, beaucoup plus vite que chaque pilote pourrait le conduire.
Dans le mode normal (le mode I) on fait contre chaque mouvement d'idée comme un "amortisseur" (le
mode I), par exemple, à des rafales de vent.

4
FUZZY SMM possède le deuxième mode d'opération (le mode II), dans ce mode d'opération,
l'éruption de matraque d'impôt agit directement sur la toupie, celui-ci conduit alors le gouvernail ou
modèle sans effet assourdissant après l'avantage de la matraque d'impôt et tient avec cela la vitesse
de rotation fixée à l'avance proportionnellement à l'éruption de matraque constante.
Des mouvements d'impôt du pilote mènent aussi vers des mouvements d'idée, donc, un mixer interne
s'occupe de ce que les mouvements d'idée conduits ne sont pas compensés par le pilote.
Mode I, Normale
Le mode d'opération comme toutes les toupies jusqu'à présent, travaille avec le haut amortissement
sur le gouvernail respectif, mis, par exemple, sur l'aileron si lors du départ ou à l'atterrissage, dans
l'excursion droite ou au cercle d'ascendance thermique, à FUZZY SMM le modèle arrête
régulièrement, aucune rafale ne peut déranger plus la répartition de pays, aucune ascendance
thermique encore ne peut jeter le modèle du train. Pour des vols d'ascendance thermique, FUZZY
SMM par émetteur est coupé à la recherche dès que la "barbe" est trouvée, FUZZY SMM activent et
dès ça va en haut au centre de la barbe, tombent de façon (presque) impossible lors de l'emploi juste.
A remorqué nécessaire aussi pour la machine de moteur, FUZZY SMM deux modèles arrête
absolument justement et n'admet plus aucun mouvement brusque sur l’axe. Aussi sur le gouvernail de
hauteurs les avantages connus ne résultent pas, par exemple, aucun modèle ne saute plus à
l'atterrissage, dans la voltige, le modèle s'enclenche en règle. Par ces qualités monte la performance
du modèle, car la résistance de modèle, provoquée par des éruptions d'impôt des gouvernaux devient
en tout par le pilote, moindre.
Mode II, Heading
Nouveau mode d'opération, recommandé pour tous les modèles avec des problèmes lors du départ,
par exemple, sur le gouvernail de côtés. Avec cela une évasion du modèle non seulement est
empêchée, le cours est respecté dans chaque cas. Avec Heading la fonction (engl. Le cours tiennent)
le modèle devient dans sa direction. Celui-ci convient aussi pour tous les autres gouvernaux, doit être
essayé cependant dans le cas isolé. L'éruption de matraque provoque une rotation du modèle autour
de l'axe stabilisé, la vitesse de rotation est toujours proportionnelle à l'éruption de matraque. La
matraque conduit la vitesse de rotation du modèle, non plus une direction.
Possibilités de réglage
DIP de 4 pôle le commutateur sert à l'embauche des paramètres :
ON OFF
1
Sortie 1, la direction de Servo
NORMALEMENT
Sortie 1, la direction de servo REVERSE
2
HEADING Mode Mode NORMALE
3
Assortiment Servo la limite Utilisage NORMALE
4
Sortie 2, la direction de Servo
NORMALEMENT
Sortie 2, la direction de servo REVERSE
Enclencher: après la mise sous courant du récepteur/gyroe, le modèle ne remuent pas jusqu'à LED
brille ou lui-même Servos font conduire. Pour Enclencher irréprochables que 80% de sensibilité ne
règle plus, autrement celui-ci n'est pas fini, LED ne brille pas. A utiliser plus tardive, la sensibilité
jusqu'à 100% peut être réglée.
Chacun changent de DIP-Switches un changement de vitesse de le gyro est seulement après
avoir éteint et encore efficace. Devant une nouvelle mise sous courant seulement environ 20-30
sec. Des points de vue, seulement les nouvelles positions de commutateur sont efficaces alors
(l'installation de sécurité l'interruption de tension doit être esquivée).
LE DIP 1/4 - NORMALEMENT / DES REVERS
Reverse la direction de compensation de servo respectif autour de. La position du commutateur DIP
devient memoirise seulement à la mise sous courant, déguisement plus tardif est sans
fonction.
LE DIP 2 – NORMALEMENT, NORMALEMENT / HEADING
Avec ce DIP-Switch peut être choisi si le gyro fait le mode ou éligible entre le mode de Heading et
Normalement (s.u.) exclusivement dans (l'étouffeur) Normalement.
Dans la position ON du commutateur DIP 2 sont à la disposition le mode d'opération normal (le mode
I) et aussi le mode d'opération HEADING (le mode II). Entre les deux modes peut être choisi avec le
canal de Gain. Le mode d'action du canal GAIN est tellement changé que le minimum de sensibilité se
trouve pour les deux modes au centre d'un canal libre. Les valeurs plus grandes sur un côté
provoquent une stimulation de la fonction HEADING (le MODE II), au maximum de canal, 100% est
atteint. Du centre à l'autre côté, le mode de gyro normal (le MODE I) dans la sensibilité est conduit. Au
contrôle pour le mode d'opération, la fréquence optique change LED.
Le DIP 3 - l'assortiment des limites de servo
Si ce commutateur se trouve pendant enclencher de le gyro dans la position ON, l'assortiment des
limites de servo (LED part brille continuellement). Dans l'émetteur, aucune réduction de chemin ou
différenciation ne devait être programmée. Maintenant, l'assortiment des limites de servo
mécaniquement possible au gouvernail à stabiliser est transporté avec la matraque d'impôt
respective après les deux côtés. Avec cela le chemin mécanique devait être grand de la même
façon après les deux côtés, avec le Servo ou le système de tiges d'impôt ne peut courir à
aucune affiche mécanique. La position maxima atteinte de la matraque est mémorisée après un
côté. Avec cela, le chemin de Servo conduit par le gyro, non chemin de Servo qui est conduit à
l'émetteur est réglé.
Si est le chemin est formé, des commutateurs DIP dans la position OFF apportent, avec cela le chemin
est mémorisé. Après abattent du commutateur DIP dans la position OFF Servo remue au contrôle
après à droite - le centre - à gauche. Maintenant, ce chemin correspond au chemin que Servo
exportera à la pleine éruption de correction après chaque côté, Limiter incorporé empêche alors que
Servo se mette en marche mécaniquement. Des gyro (récepteurs) éteignent, allument encore, le gyro
se trouve encore à l'entreprise normale. La position du commutateur DIP devient seulement à la
mise sous courant, déguisement plus tardif est sans fonction. Avec cette fonction, seulement les
petites corrections la maniere de servo devaient se produire autant que possible (+/-10%), la qualité
du réglage pourrait être influencé par ailleurs négatif.
1, le soutier de dynamique
Base pour l'embauche de dynamique : Le but à la mouche avec des gyro est voler avec la
sensibilité de gyro possible au maximum. Alors le soutien de gyro optimal est atteint à la précision
d'impôt le plus grandement possible. Si la sensibilité est augmentée, devient se le modèle dès un point
déterminé osciller, une augmentation supplémentaire de la sensibilité accélère osciller. Le point auquel
osciller commence, est très fort des facteurs mécaniques dans le modèle dépendant comme par
exemple la force de Servos, la reproductivité Servo positiones et, avant tout, de la vitesse de Servos
utilisé. Maintenant, le régulateur de dynamique permet de régler le gyro dans à peu près sur les
réalités mécaniques disponibles. Si le régulateur du centre sur le côté défavorable est tordu, le modèle
s'élance encore plus fort sur. Si on tourne le régulateur au côté juste (dépendant des réalités
mécaniques), maintenant on peut ouvrir plus loin la sensibilité et améliorer encore une fois avec cela le
résultat de gyro. Rotation à gauche = plus confortablement, la rotation à droite = plus dur.
Une embauche neutre existe (NORMALEMENT) dans la position de moyen à l'entreprise de gyro dans
le MODE I, à gauche "rotation" est plus mou, à droite plus dur. Osciller du modèle, des soutiers en
direction de confortablement tournent.
Dans le mode II, (HEADING), le soutier influence vitesse de compensation et la précision d'appui de
position de confortablement jusqu'à dur.
2, Fade out
Avec le poti 2 peut être réglé à quel point de l'éruption de matraque l'effet de le gyro est coupé.
L'embauche peut être choisie entre 20% et 100% du chemin de matraque.
L'effet de poti se produit toujours un peu de manière retardée, donc au test après le déguisement se
produit attendent quelque chose.
Moniteur LED
Après le process de enclencher :
Aucun scintillement sensibilite=0, gyro coupé
X-X-X Gain le canal pas couvert, on. Gain activement
XX-XX-XX l opération mode 1, Normalement, tout O.K.
XXX-XXX-XXX opération mode II, Heading, tout O.K.
Si le LED brille 4 ou 5 fois vite, le gyro ne peut pas être faite. Dans ce cas, un changement non
pouvant être rétabli du détecteur de Piezo existe, il fut par la vibration, le vieillissement etc. une
routine de sécurité à la mise sous courant s'occupe alors de ce que le gyro ne va pas à utilisage.
Ainsi, une perte est empêchée à cause des changements d'élément dans le vol = la haute sécurité.
Le gyro reconnaît naturellement aussi du pilote aux rotations conduites autour de l'axe stabilisé. C'est
pourquoi, il essaierait de compenser aussi ces mouvements d'idée qui changerait complètement le
sentiment d'impôt pour le modèle.
FUZZY SMM est fermé en fondu dans ce cas par un disparaître incorporé de la matraque. A l'un
entre 20% et 100% d'éruption de matraque réglable (Poti 2) après un côté, l'effet de FUZZY SMM à
100% est réprimé.
Ajustement de sensibilité par l'émetteur
FUZZY SMM pendant l'utilisage ou tourné le commutateur par dès ou continu peut être réglé par le
canal supplémentaire dans la sensibilité entre 0% et 100%.
Ainsi FUZZY SMM à la recherche de l'ascendance thermique peut être coupé car avec FUZZY allumé
par, l'ascendance thermique ne peut être reconnue peut-être au comportement de modèle.
Le gyro de surfaces traditionnelles en face de loin la sensibilité augmentée s'occupe aussi de la
stabilisation suffisante pour des modèles avec la grande envergure ou haute masse.
Aux modèles plus petits, le réglage de sensibilité peut être difficile ainsi, donc, peut-être un peu parce
que la sensibilité possible au maximum est déjà atteinte après relativement petit chemin de canal a
l’emmeteur. Dans ce cas, la réduction de chemin aide alors dans l'émetteur. Simplement pour le canal
de sensibilité programment une réduction de chemin, ainsi l'effet est écarté, et la sensibilité peut être
réglée plus avec sentimentalité.
Ajustement de sensibilité manuelle, le fait de savoir du "manque de canal" le réglage de sensibilité
(canal de Gain) au récepteur ne deviennent pas, la sensibilité peut aussi être réglée à Poti (Poti 1).
Boîtier
Par la manière de construction basse, petite grandeur de boîtier et le petit poids peut être mis par de
FUZZY SMM aussi dans les petits modèles.
Installation
le détecteur de le gyro doit être incorporé tellement que l'axe de gyro et l'axe à stabiliser souhaité du
modèle (l’axe aileron, l’axe profondeur, l’axe derive.) sont identiques. L'axe de détecteur court d'en
haut par le boîtier de détecteur. C'est pourquoi, le montage dans le modèle doit se produire tellement
que le sol du boîtier de détecteur exactement 90 degrés est monté à l'axe voulu. Nous recommandons
la fixation du détecteur avec le ruban adhésif double ci-joint. Le détecteur de gyro avec le sol de boîtier
sur le lieu prévu dans le modèle collent.
L'expérience montre que le détecteur de gyro devait être monté autant que possible à un lieu du
modèle très loin des moteurs, puisque l'élément de détecteur lui-même mesure des vibrations de
moteur comme le mouvement et transmet à Servo et renforce, cela mènerait vers le Servos
considérable. Un lieu stable dans le modèle est le mieux tant que celui-ci ne se déforme pas ou oscille.
Servo utilisé est dirigé très fréquemment par la haute résolution du détecteur qui peut mener plus haut.
Le résultat de gyro le meilleur est obtenu naturellement avec Servos rapides.
Le boîtier d'électronique de le gyro peut être incorporé à un lieu convenable dans la mécanique. Font
attention aussi ici au stockage libre de vibration, emballent Meilleur dans le caoutchouc d'écume.
Correspondance
Des prises en courant et le coussinet de le gyro correspondent à System JR/Futaba. Il doit être estimé
purement à ce que les côtés d'impulsion des prises en courant soient aussi mis au récepteur
proportionnellement, aussi Servostecker dans le coussinet de la toupie. Au ne naît aucun défaut,
purement aucune entreprise des prises en courant et des coussinets (s ne se met. Image).
Couleurs de câble Stecksysteme :
Système Plus (+) Moins (-) Impulsion
Graupner rouge Brun orange
Futaba rouge Noir sait
MPX rouge Noir jaune
D'abord on recommande d'entreprendre toutes les correspondances pour l'axe/fonction stabilisé sans
FUZZY SMM et des émetteurs et le Servo tellement règlent que toutes les fonctions travaillent juste de
sens (échappe au modèle déjà volé).
Alors FUZZY SMM succédent. entre Servo disponibles de l'axe à stabiliser et le récepteur. En plus
Servo pour l'axe stabilise rendre au récepteur se retirent et se trouvent sur 1 de FUZZY pro. L'Impulse
de Servo (Futaba sait, JR orange, MPX jaune) toujours de même que le câble initial se directement
trouvant en bas. Servo 1 (se trouve lors de la livraison dans 1) de FUZZY SMM dans la sortie de Servo
librement se trouvent devenue au récepteur. Servokabel de FUZZY SMM pour la sensibilité se

5
trouvent (le câble avec le marquage jaune) dans un canal (fonction ou fonction de commutateur) libre
au récepteur.
Si 2 servos (aileron) sont disponible, cela se trouvent dans la sortie 2 de FUZZY pro, le câble
correspondant mettent dans la deuxième sortie de récepteur pour cette fonction. Si aucun canal libre
n'est disponible pour l'embauche de sensibilité de FUZZY SMM au récepteur, celui-ci peut être fait,
aussi sans mettre ce câble, la sensibilité peut être réglée alors à Poti à côté des commutateurs DIP.
IMPORTANTE!!!!
- La mise Au point de la direction d'effet et intelligent
D'abord le direction de Servo du gouvernail à stabiliser doit être réglé juste de sens sans gyro. En plus
des gyros éteignent (la sensibilité 0). Une éruption de matraque, par exemple, à gauche, doit aussi
produire une Servo/éruption de gouvernail qui conduit le modèle proportionnellement à gauche. La
sensibilité de le gyro à l'émetteur mettent (le mieux dans le mode Normalement) sur 100%.
Importante : Maintenant, la direction d'effet de le gyro doit être réglée tellement que Servo branché se
dirige vers le gouvernail à une rotation du modèle à droite tellement qu'un mouvement de contre-impôt
naît à gauche. Si le contraire est un cas, le mouvement d'idée du modèle n'est pas assourdi à la
conduite à gauche, mais est accéléré de plus. Le mouvement d'idée ne peut pas être arrêté alors peut-
être qui peut mener finalement vers la destruction du modèle.
Puisque le mouvement de contre-impôt de le gyro s'arrête toujours seulement si longtemps tant
qu'aussi un mouvement d'idée existe, cela peut être à reconnaître peut-être difficile. Le test, par
exemple, à l'aileron par ce que le modèle sur le nez est mis et on avec au modèle tourne et observe
les ailerons.
Reverser de la direction d'effet :
Si la direction de compensation est fausse, reversement de la direction d'effet avec se produit
changent de DIP-1/4. Tous les tests répètent.
MODE I (la position DIP2 OFF)
Si tout est incorporé correctement, est branché et la direction d'effet est testée, le premier engagement
peut se produire. Après, 3-5 secondes suivantes n'ALLUMENT PAS à l'installation de réception
le modèle remuent, l'électronique de le gyro effectue un auto-ajuste à ce temps. Servos branchés
effectuent à ce temps, éventuellement, les petites éruptions sans force. Un régulier brillent LED (s.o).
si la disposition d'entreprise de le gyro indique alors, Servos succédés remuent en arrière encore dans
la 2 position.
Avec un canal proportional libre ou canal de distribution à l'émetteur, l'effet (sensibilité) de le gyro peut
être réglé. Avec cela, l'effet de 0% jusqu'à 100% peut être réglé. Pour cela la norme de variation est
mise par des télécommandes de Futaba à la raison. Pour les premiers essais dans le vol se
recommande une embauche d'environ 30-40% de sensibilité.
Dans le vol augmentent alors d'abord de la sensibilité tant que, jusqu'au modèle commence à osciller
autour de l'axe stabilisé, règlent alors encore légèrement moins de sensibilité, adaptent,
éventuellement, la sensibilité par programmation à l'émetteur à l'état de vol respectif. Si le point juste
de l'embauche de sensibilité est trouvé, l'embauche de dynamique peut encore se produire.
Mode II, NORMAL+HEADING (la position DIP2 ON)
Dans ce mode d'opération, le signal de gyro est si exploité que Servo mouvement éminent de retour
tant que s'arrête jusqu'à ce que la position première soit prise encore (HEADING=arrêtent). Tant
qu'aucun mouvement d'impôt du pilote n'est ajusté, le modèle est tenu, par exemple, à la stabilisation
de gouvernail de côtés, sur le cours, comme si à gauche et à droite serait placé par l'arrière à une
plume dure qui retient l'arrière. Ainsi l'arrière reste toujours dans la position, le modèle reste
absolument stable en direction, à des idées de chemin n'est plus possible, ainsi un réglage de situation
véritable d'un haut axe existe.
Comme la position de situation, la situation est acceptée qui existait à la mise sous courant de
la toupie, à la mise sous courant de la fonction HEADING (la commutation de NORMALEMENT
sur l'entreprise HEADING), ou le Lage/Position/direction qui était pris après avoir lâché la
matraque d'impôt (la matraque dans la position de moyen) nouvellement.
A l'entreprise HEADING (le MODE II, le DIP 2 dans la position ON), le mode d'action du canal de
sensibilité est tellement changé maintenant que le minimum de sensibilité se trouve au centre d'un
canal libre. Les valeurs plus grandes sur un côté provoquent une stimulation de la fonction HEADING
(le MODE II), au maximum de canal, 100% est atteint. Du centre à l'autre côté, le mode de gyro normal
(le MODE I) dans la sensibilité est conduit. Fondamentalement nous recommandons, le gyro
d'abord à l'entreprise normale (le MODE I, s.o.) voler et découvrir l'embauche de sensibilité
juste avec cela.
La commutation sur l'entreprise HEADING se produit sur le canal de sensibilité. Avec cela celui-ci est
apporté par la main sur la position souhaitée sur le côté HEADING, ou est commuté par commutateur.
Avec cela, l'application d'un commutateur de marches 3 qui commute le canal de sensibilité et/ou l'état
de vol est le plus simplement.
Dans la nouvelle version V3, la position de Trimm de la matraque est pris en charge en
commutant de NORMALEMENT sur Heading automatiquement comme la 0 position pour
Heading.
Si tout est réglé parfaitement, peut être essayé encore maintenant avec le soutier de dynamique
d'augmenter plus loin la sensibilité possible au maximum. Prudemment de la position le "centre" en
dehors après un côté tordent et se passent comme sous le "soutier de dynamique" décrivaient.
L'embauche de sensibilité extrêmement possible est la meilleure.
Attention! Si la stimulation du MODE II au sol se produit, par exemple, lors du départ pour le
gouvernail de côtés, alors, nous recommandons de rouler le modèle seulement dans le mode I au
départ de transmettre vers le cours souhaité et alors d'activer seulement le mode II peu de temps
avant le départ.
Ce procédé est nécessaire parce que comme la position de situation toujours la situation est
acceptée, à la mise sous courant de gyro.
Sans ce procédé, il pourrait arriver que le gyro conduise le modèle dans la direction qui existait
à la mise sous courant.
Pour les premiers Heading des essais, une embauche d'environ 20-30% de sensibilité HEADING ou
déjà pour le mode normal (le MODE I) se recommande de la sensibilité. Aussi ici est valable encore
que pour les résultats optimaux avec la sensibilité le plus grandement possible devait être volé, aussi
ici osciller du modèle est l'annonce que la sensibilité est réglée trop en haut. A l'entreprise HEADING
augmentent alors d'abord de la sensibilité tant que jusqu'à ce que le modèle commence à osciller,
règlent alors encore légèrement moins de sensibilité, adaptent, éventuellement, l'embauche de
sensibilité par programmation à l'émetteur à l'état de vol respectif, une embauche de l'émetteur à
laquelle la commutation du mode I se produit après le mode II et l'embauche de sensibilité seulement
avec un commutateur est le plus agréablement.
IMPORTANTE : A l'entreprise HEADING, aucun mélangeur ne peut être activé pour la fonction
stabilisée dans l'émetteur, autrement des demandes d'impôt des autres, aux fonctions mélangées
seraient reconnues comme le mouvement d'impôt pour le modèle et mènent vers un mouvement
d'impôt de servos de gyro. C'est pourquoi, à la commutation sur l'entreprise HEADING, tous les
mélangeurs doivent être coupés automatiquement pour l'axe stabilisé dans l'émetteur. Si le trims sont
commutés pour la fonction stabilisée par l'état de vol à l'état de vol, aucun retard de la commutation
ne peut être programmé pour cela dans l'émetteur.
En outre, aucun trim de neutre de la fonction stabilisée n'est à la disposition dans le principe dans le
mode HEADING, car aussi mouvements de trim sont reconnus comme des éruptions d'impôt et sont
déplacés dans des mouvements d'idée du modèle. Cvd., le modèle doit devenir trim dans le mode
normal (le mode I), à la commutation sur HEADING, le positions de Trims respectifs sont pris en
charge alors. Entraînent à l'entreprise HEADING s'avère la rotation du modèle.
Si ne se laisse partir pour l'entreprise HEADING et entreprise normale aucun trim commun obtiennent,
cvd. . le modèle tourne facilement à HEADING, le trim pour HEADING règlent (la rotation de modèle
semblable à 0) et dans l'émetteur mémorisent, font alors le modèle dans le mode NORMALEMENT et
changent mécaniquement la 2 position du gouvernail jusqu'à ce que le modèle vole dans les deux
modes d'opération au même trim dans la direction souhaitée.
Attention: Le mode d'action de la stabilisation à l'entreprise HEADING peut être exigeant
l'accoutumance. Maintenant, l'axe stabilisé doit être coconduit correctement, avant tout, au
gouvernail de côtés, dans chaque courbe, autrement la fonction HEADING tient toujours de la même
façon la position du tronc. Dès que la matraque est lâchée encore, le gyro retient la nouvelle direction
du tronc (haut axe) tant que, jusqu'aux demandes d'impôt encore se produisent. Une vitesse de
rotation constante du modèle est classée dans le MODE II à une éruption de matraque déterminée par
les qualités de règle particulières autant que l'efficacité de gouvernail le permette.
Une réduction possible chez certains émetteurs effets de trim augmente considérablement le confort
pour HEADING et permet le fait d'entraîner plus sensible à l'entreprise HEADING.
Information!
Eventuellement, des dérives de Servos jusqu'à l'éruption finale sont à constater à l'entreprise
HEADING dans la place. C'est normal et aucune faute. Chaque émetteur envoie aussi dans le zéro les
toujours tout à fait petites éruptions (Jitter) que même le Servo le meilleur ne reconnaît pas. FUZZY
SMM à haute résolution par reconnaît lui-même ces petites éruptions comme l'ordre d'impôt. Puisque
le modèle ne tourne pas avec cela cependant ou ne suit pas "l'ordre d'impôt", justement Servo court
lentement jusqu'à l'éruption finale. A l'entreprise, c'est sans signification, puisque alors le modèle
remue.
Indications de sécurité
Malgré tout le soutien aidant de le gyro les impôts d'un modèle de vol, les certaines adresses que le
gyro ne peut pas remplacer supposent. Cela signifie que l'utilisateur doit s'approcher prudemment et
responsable des fonctions du modèle et de la toupie. La responsabilité de l'entreprise sûre du modèle
se trouve toujours chez le pilote, c'est pourquoi, il est toujours recommandé l'aide d'un pilote expert
pour les premières embauches et les vols à des débutants. A ce lieu serait rappelé encore une fois
spécialement l'embauche juste de la direction d'effet.
English
FUZZY SMM
Instruction manual
Description
The FUZZY SMM is used for the stabilisation of model aircrafts. Its intelligent microprocessor
controlled electronics, coupled to a Piezo sensor, monitors the rotation of the model around the gyro/s
axis. The FUZZY SMM Gyro is specially designed to be used in an airplane with features airplane
flyers require.
The FUZZY SMM monitors all movements around it’s axis much faster than the pilot can, and
responds with different modes.
The FUZZY SMM is perfect for aerobatics, thermal flying, glider towing (in both the towing craft and the
glider), jets and scale models. Basically, the Airplane Stabilizer Piezo Gyro is perfect for any model
with a stability problem, or for any pilot who wants to enhance their flying with the added stability of a
gyro.
The SMM sensor element is "state of the art" technology, and operates without any mechanical parts, it
is totally wear free and has no temperature drift.
The gyro can be used in two different modes. MODE I works as a dampener, effectively acting like a
brake, it does not return the model to its starting position. MODE II holds the model in the last position
which was set with the stick.
The sensitivity of the FUZZY SMM can be adjusted from the transmitter with any free proportional
channel during use, so the gyro´s response can be adapted to the characteristics of the model whilst it
is flying. In addition, with this channel, it can be switched between MODE I and MODE II.
A special feature in this gyro is the "Dynamic" pot, which adjusted the characteristics of the gyro
response, allowing you to tune the gyro to your model characteristics.
The internal LED shows the current status by flashing in different patterns.
For best results the FUZZY SMM should be used in conjunction with fas servos, we recommend
Futaba servos. Servos from other producers could perhaps have problems to work with the high speed
and precise signals from the gyro. This results in small vibrations and current consumption.
Features
The FUZZY SMM has two servo signal inputs and two servo outputs—each with its own reversing
switch. This enables you to use your gyro for a control that is operated by two servos (such as dual
servo operated elevators or ailerons). This also enables you to retain your mixing without affecting the
operation of the gyro. For example, if you wish to connect your gyro to the elevator (operated by two

6
servos), your elevator/rudder mixing will still be able to function correctly. Similarly, if you wish to
connect your gyro to the ailerons (each operated by its own servo), the gyro will not affect your mix.
Your FUZZY SMM has a third input for gain control which allows you to you adjust the sensitivity or
effectiveness of the gyro, and you can do it while in flight. This requires an adjustable control knob or a
pot on your transmitter (or a programmable mix if you have a computer radio). You may also turn the
gyro off when it is not needed.
A built-in and adjustable mixer reduces the gyro’s effect when you move the control stick from center,
you have the same feel or responsiveness that you would without a gyro—a kind of reverse
exponential effect. In addition, the gyro recognizes when the input is coming from the stick or from a
mix. For example, if you are using your gyro to stabilize your ailerons and you have a flaperon mix, the
gyro’s sensitivity will not be reduced when the ailerons are extended by your flaperon mix.
Mode I (Standard)
Works like all former gyros as a dampener, useful for all manoeuvers.
Mode II HEADING/AVCS
New gyro characteristics. Holds the position or direction of the model arround the stabilized axis until a
given stick control.
Adjustments
Function of DIP-Switches
ON OFF
1 Servo 1 direction Normal Servo 1 direction reversed
2 Heading Mode Normal Mode
3 Set Servo limit Normal-use
4 Servo 2 direction Normal Servo 2 direction reversed
Every change of DIP-Switch need a certain waiting in OFF position of receiver until the change
will be recognized. IMPORTANT: After switching the receiver ON, DO NOT move the model for
about 3-5 seconds, until the Led flashes. During this time the gyro calibrates the piezo sensor´s
centre position, and confirms that the unit is functioning correctly - indicated by the LED flashing.
DIP switch 3:SET LIMITS
With that switch in ON position during switching-ON procedure for receiver, the servo end position
adjustment starts. Use full servo throw. Use the tail rotor stick and move it slowly to one end position,
back to centre and to the other end position. Now the Gyro knows the stick throw and the centre
position used. We recommend that this centre position is hover-position. Now switch the DIP switch 1
back to OFF position, the servo moves to left, centre and right position to indicate the stored positions.
Switch OFF receiver, wait 10 seconds ore more and switch ON receiver again. The gyro knows now
the positions and the tail servo will never move over these positions during flight. Please take care that
with these end positions no mechanical limit from the linkage to the servo can happen.
DIP switch 1+4: Servo reverse
With these DIP switches the servo direction can be reversed. It reverses the servos direction for control
movements of the servos, given from the gyro (not from transmitter controls).
DIP switch 2: MODE II HEADING/AVCS
In OFF position (MODE I) the gyro is a Standard gyro, in ON position the gyro works in two modes,
depending to the position of the gain channel. Minimum gain is in the centre (1,5ms) of the gain
channel. Maximum gain for either Standard-Mode (MODE I) or HEADING Mode (MODE II) is at the
end positions of the gain channel. As indication, the LED flashes 2 x at NORMAL, 3 x MODE II. In
HEADING mode, the gyro holds the position/direction of the stanilized axis, as long as there is no stick
control from the pilot. The position is set either when switching ON receiver in HEADING mode,
switching from Standard- to HEADING-Mode or after every stick control movement.
Pot 1, "Dynamic" Pot Adjustment
The best gyro results can be reached wíth with the maximum possible sensiitivity. With the "Dynamic"
pot, the gyro´s response in MODE I and Mode 2 can be tuned to your model´s characteristics. Every
model has different servo speeds, controls aso., so the dynamic pot can be adjusted to change the
response curve in relation to the rate of turn. The better the dynamic is adjusted, the higher the
sensitivity can be adjusted. Please adjust the pot with a small pozi-drive screwdriver. Left position =
soft dynamic, right position = hard dynamic. If the model starts to wag out, reduce dynamic pot position
to soft direction and try to increase sensitivity (gain) again.
If the gain-channel of the FUZZY SMM is not connected to the receiver, the pot works as manually gain
pot, the gain can be manually adjusted here.
Pot 2, Stick fade out adjustment
A built-in and adjustable mixer reduces the gyro’s effect when you move the control stick from center,
you have the same feel or responsiveness that you would without a gyro—a kind of reverse
exponential effect. The pot adjusts the point, were the gyro will be switched of when you move the
control stick at the transmitter. The adjustment effects with a small delay.
LED Status
LED-Indication, Voltage control
X-X-X Mode Normal, gain manually adjusted
XX-XX-XX Mode I, Normal
XXX-XXX-XXX Mode II, Heding
Installing the Fuzzy SMM
The sensor must be installed in a way, that it’s axis and the wanted axis of the model are identical (s.
picture). The sensor-axis works from above through the sensor-case. The installation in the model
must occur from the ground of the sensor case being mounted exactly to the desired axis. We
recommend the fixing of the sensor with enclosed double adhesive tape. Stick the top-sensor into the
planned place in the mechanics. The experience shows that the top sensor should be mounted if
possible at a place in the model far away from an engine, since the sensor element even measures
engine vibration as movement and passes it to the servo. This can lead to considerable servo
problems. The used servo is headed by the high decomposition of the sensor very frequently, which
can lead to higher servo wear. The best top result is achieved of course with fast servos.
The electronics-case of the gyro can be installed at a suitable place in the model, packed in foam
rubber.
Connection:
The connectors on the FUZZY SMM use the Futaba polarity system. Therefore any Futaba, JR or
Hitec equipment is directly compatible with the unit.
Lead colours :
System Plus (+) Minus (-) Signal
Graupner/JR red brown orange
Futaba red black white
MPX red black yellow
The gyro is connected between the receiver and the servo for the deisred control. The connector
without a mark is plugged into the receiver output for the servo. The lead with the mark is connected to
the Gain (AUX) channel on the receiver. The Gain channel should correspond to a free proportional
channel on the transmitter, so that the gain can be easily adjusted in flight.
Practice
Adjustment of Gyro Direction
Before connecting the gyro, please make sure that the control of the model you want to stabilize is
responding in the correct direction to the movement of the transmitter stick. Then connect the gyro to
the receiver and servo as described above and set the gyro gain (AUX) on the transmitter to 100%
(only for test purpose, we test on aileron).
Hold your model and quickly rotate it about the axis the gyro is operating. In the case of our example
for the roll axis, quickly bank the model to the right and the left as if it was performing a roll. When the
right wing dips downward, observe which way the right aileron responds. If installed correctly, the right
aileron should deflect downward to counteract the right roll of the model. Similarly, when the left wing
moves upward (as if in a right bank), the left aileron should deflect upward to counteract the right roll of
the model. If your gyro responds opposite of the way described, turn the receiver switch off and
reverse the DIPswitches on the gyro. Turn the receiver switch back on and test again.
CAUTION:If the gyro direction is set incorrectly, the model can’t be controlled anymore durcing flight.
If everything is installed correctly and checked, then the gyro gain should be set to about 30% for the
first flights.
Operation MODE I (DIP-Switch 2 in Position OFF)
The gyro gain is controlled directly from the transmitter (AUX channel), and can be adjusted from 0% to
100% gain. However for the first flight we recommend starting with about 30%-40% gain. Once in the
air, increase the gain slowly until the model starts to wag out, then reduce the gain until it stops.
If you are experienced with that function, you can adjust the dynamic pot and try to increase the gain.
Operation MODE II, HEADING (DIP-Switch 2 in Position ON)
If the gyro shall be used in HEADING, set DIP switch 3 in position ON. With this MODE the gyro offers
both Modes, Standard- and HEADING-Mode. In HEADING-Mode the gyro holds the position of the
stabilised axis as long as the stick is in centre position. During stick movement, the gyro has no
function, the stick is directly working with the controls, after the stick has reached the centre position
again, the gyro recognises the last position of the model as its new position to hold on. In MODE II the
AUX channel changes as shown. Minimum sensitivity is in 0-position, maximum sensitivity in Standard-
Mode is at one max. position of the sensitivity channel, max. sensitivity of HEADING-Mode is at the
other end of the sensitivity channel. In that way it can be switched between Standard-Mode and
HEADING-Mode. HEADING will be indicated with LED twinkling 3 times.
In HEADING it also should be started with 30%-40% sensitivity. Once in the air, increase the gain
slowly until the model starts to wag out, then reduce the gain until it stops. If you are experienced with
that function, you can adjust the dynamic pot and try to increase the gain.
During HEADING, you can say there is no stick trimm available, because a given trimm amount will
lead to a a turn of the model. Therefore trim the model during use of Standard-Mode, then switch to
HEADING. The trim position of Standard-Mode will be overtaken to zero position of the tail during
HEADING. Any further trim movement during HEADING will start to turn the helicopters tail.
In HEADING-Mode, the gyro controls the angle speed in conjunction to the stick position, therefore any
servo signal out of the centre position will result in turning the model.
Note: A slow drifting of the servo’s neutral position during HEADING is normal. During use it will be
compensated.
Technical data’s
• Voltage range 3,3 Volt - 9 Volt
• Consumption about 45 mA
• Weight about 30 Grams
• Size 48 x 39 x 15 mm
• Temperature range -10° - +50° Celsius
• Servo-limiter by Software
• 3-level, self learning temperature drift compensation
• NORMAL/REVERSE-Switch
• 8-Bit Microprocessor, Clock speed 22 MHz, 4096 Bit
• Programmable Servo throw and centre position
• Adjustable dynamic without PC
• LOCK-ON-Function (Heading Lock) indicated by LED
• Low voltage drop compensation for max. 2 seconds, no problem with switching ON procedure
• LED-Monitor
We wish you much fun with the FUZZY SMM and a lot of more performance for your airplanes.

7
ACT europe, Karlsruher Straße 20, 75179 Pforzheim, www.acteurope.de
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7







dans d''autres langues
- English: ACT Europe FUZZY SMM User manual
- Deutsch: ACT Europe FUZZY SMM Benutzerhandbuch
Autres documents
-
 Reely 1277098 Mode d'emploi
Reely 1277098 Mode d'emploi
-
GRAUPNER MX-12 - PROGRAMMATION Le manuel du propriétaire
-
MULTIPLEX Royal Evo Le manuel du propriétaire
-
Futaba GYA440 Manuel utilisateur
-
ROBBE Piezo Gyro G 400 Installation And Operating Instructions Manual
-
-
protech ZOOM 450 ccpm Manuel utilisateur
-
-
-
