Butler Librak280RTLC Pro Le manuel du propriétaire
- Taper
- Le manuel du propriétaire

MANUEL D’INSTRUCTIONS
• Pour tout renseignement complémentaire s’adresser au revendeur le plus proche ou directement à:
F
TRADUCTION DES
INSTRUCTIONS ORIGINALES
Pour les tables partie des rechanges se référer à la section “LISTE DES PIÉCES DÉTACHÉES” jointe à ce
manuel.
- Rév. n. 2 (12/2016)
LIBRAK280RTL
LIBRAK280PRTL
LIBRAK280RTLC
LIBRAK280PRTLC
1294-M017-2_B
1294-M017-2_B
BUTLER ENGINEERING and MARKETING S.p.A. a s. u.
Via dell’Ecologia, 6 - 42047 Rolo - (RE) Italy
Phone (+39) 0522 647911 - Fax (+39) 0522 649760 - e-mail: Info@butler.it

F
Page 2 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
SOMMAIRE
SYMBOLES UTILISÉS DANS LA NOTICE
ET SUR LA MACHINE _____________________ 5
1.0 GÉNÉRALITÉS ______________________ 7
1.1 Introduction ____________________________ 7
2.0 DESTINATION D’EMPLOI ____________ 7
2.1 Préparation du personnel préposé _____7
3.0 DISPOSITIFS DE SÉCURITÉ _________ 8
3.1 Risques résiduels ______________________ 8
4.0 NORMES GÉNÉRALES DE SÉCURITÉ _ 8
5.0 EMBALLAGE ET DÉPLACEMENT
POUR LE TRANSPORT ______________ 9
6.0 DÉBALLAGE _______________________ 10
7.0 DÉPLACEMENT ____________________ 10
8.0 ENVIRONNEMENT DE TRAVAIL ____ 10
8.1 Aire de travail _________________________11
8.2 Éclairage ______________________________11
9.0 MONTAGE DE LA MACHINE ________ 11
9.1 Système d'ancrage ____________________11
9.2 Accessoires contenus dans l’emballage _12
9.3 Procédures d’assemblage _____________13
9.3.1 Montage du mandrin sur la flasque _13
9.3.2 Montage et enlèvement du man-
drin pneumatique sur la flasque ___13
9.3.3 Montage écran _____________________15
9.3.4 Montage du carter de protection ___16
9.3.5 Montage tige externe (option) ______16
9.3.6 Montage du mesureur électro-
nique de Run-out (option) __________17
10.0 BRANCHEMENTS ÉLECTRIQUES ___ 18
10.1 Contrôles électriques __________________18
11.0 BRANCHEMENT PNEUMATIQUE ____ 19
12.0 MONTAGE DE LA ROUE SUR LE
MANDRIN __________________________ 19
12.1 Montage de la roue ____________________19
12.2 Démontage de la roue _________________21
13.0 PANNEAU DE COMMANDE _________ 22
14.0 ÉQUILIBRAGE ROUE _______________ 23
14.1 Mise en marche et arrêt de l'équipe-
ment___________________________________23
14.1.1 Programmations modalité d'équi-
librage _____________________________25
14.2 Configuration programmes d'équili-
brage __________________________________25
14.2.1 Configuration rapide des pro-
grammes et mesures au moyen
du bras de la pige distance-dia-
mètre ______________________________25
14.2.2 Procédure de mesure du run-out
(latérale côté interne) avec le
bras de la pige distance-diamètre _26
14.2.3 Correct positionnement du dispo-
sitif pendant la détection du Run-
out (Option) ________________________27
14.2.4 Configuration programmes par
page-écran acquisition mesures ___28
14.3 Affichage indicatif points où relever
mesure/application du poids __________29
14.3.1 Positionnement des poids __________29
14.4 Affichage du champ actif/en modifica-
tion ____________________________________29
14.5 Description de la page-écran d'équili-
brage __________________________________30
14.5.1 Modalité d'équilibrage _____________31
14.6 Utilisation des machines avec tige
automatique désactivée _______________33
14.6.1 Introduction manuelle des dimen-
sions de la roue ____________________33
14.7 Programmes d'équilibrage standard __33
14.7.1 Statique ___________________________33
14.7.2 Statique-1 _________________________34
14.7.3 Statique-2 _________________________34
14.7.4 Dynamique ________________________34
14.7.5 ALU-S ______________________________34
14.7.6 ALU-S1 _____________________________35
14.7.7 ALU-S2 _____________________________35
14.7.8 ALU-1 ______________________________35
14.7.9 ALU-2 ______________________________35
14.7.10 ALU-3 _____________________________36
14.7.11 ALU-4 _____________________________36
14.8 Programmes d'équilibrage en option __36
14.8.1 Modalité ECO-WEIGHT _____________36
14.8.2 Modalité SPLIT ____________________38
14.8.3 Modalité poids cachés derrière les
branches ___________________________40
14.8.4 Modalité matching _________________41
14.9 Programmes
d'équilibrage spéciaux_________________44
14.9.1 Pax _________________________________44
14.10 Fonction recalculer ___________________44
14.11 Équilibrage modalité moto
___________45
15.0 MENU UTILISATEUR (OPTIONS ET
RÉGLAGES) ________________________ 46
15.1 Menu options __________________________46

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 3 de 64
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
15.1.1 Limite poids inférieur _____________48
15.1.2 Programmation dimensions poids
adhésifs et % de seuil statique _____48
15.1.3 Gestion des utilisateurs ___________49
15.2 Activation du mesureur électronique
de Run-out (Option) ___________________50
15.3 Réglages de la machine _______________51
15.3.1 Réglage zéro mandrin ______________51
15.3.2 Réglage des capteurs de mesure
du poids pour voiture ______________51
15.2.3 Réglage des capteurs de mesure
du poids pour camion ______________52
15.3.4 Réglage de la tige __________________54
16.0 SIGNALISATIONS D'ERREUR _______ 57
17.0 ENTRETIEN ORDINAIRE ___________ 58
18.0 DONNÉES TECHNIQUES ___________ 59
18.1 Dimensions ____________________________60
19.0 MISE DE CÔTÉ _____________________ 61
20.0 MISE À LA FERRAILLE _____________ 61
21.0 DONNÉES DE LA PLAQUE _________ 61
22.0 SCHÉMAS FONCTIONNELLES ______ 61
Table A - Branchements électriques _________62
Table B - Branchements pneumatiques
(LIBRAK280RTL -
LIBRAK280RTLC)
_________________63
Table C - Branchements pneumatiques
(LIBRAK280PRTL -
LIBRAK280PRTLC)
________________64
23.0 LISTE DES PIÈCES

F
Page 4 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
7
2
3
4
5
6
8
9
23
11
12
13
14
15
16
17
18
1
10
19
20
25
22
21
24
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
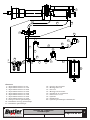
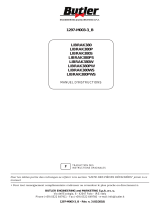
Fig. 1 - LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
LÉGENDE
1 – Planche porte-poids
2 – Élévateur roues
3 – Pige distance-diamètre
4 – Mandrin fileté (seulement pour les modèles LIBRAK280RTL - LIBRAK280RTLC)
5 – Carter de protection
6 – Commande élévateur roue
7 – Interrupteur général
8 – Écran
9 – Pieu porte-flasques
10 – Pince pour application poids
11 – Tige pour mesure largeur jante camion
12 – Outil de réglage camion
13 – Pince pour poids
14 – Écrou volant (seulement pour les modèles LIBRAK280RTL - LIBRAK280RTLC)
15 – Anneau presseur
16 – Cône + flasque adaptateur (seulement pour les modèles LIBRAK280RTL - LIBRAK280PRTL)
17 – Flasque adaptateur (seulement pour les modèles LIBRAK280RTLC - LIBRAK280PRTLC)
18 – Cône Ø 202÷221 + cône Ø 281 pour camions (seulement pour les modèles LIBRAK280RTLC -
LIBRAK280PRTLC)
19 – Mandrin pneumatique (seulement pour les modèles LIBRAK280PRTL - LIBRAK280PRTLC)
20 – Manchon de blocage (seulement pour les modèles LIBRAK280PRTL - LIBRAK280PRTLC)
21 – Tige externe largeur roue (Option)
22 – Mesureur électronique de Run-out (Option)
23 – Laser fixe + dispositif d'éclairage LED (Option)
24 – Pédales de direction ouverture/fermeture mandrin pneumatique (seulement pour les modèles LIBRAK-
280PRTL - LIBRAK280PRTLC)
25 – Collier de blocage roue camions (Option) (seulement pour les modèles LIBRAK280RTL - LIBRAK280RTLC)

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 5 de 64
SYMBOLES UTILISES DANS LA NOTICE ET SUR LA MACHINE
Symboles Description
B2167000
Lire le mode d’emploi.
INTERDIT!
Porter des gants de travail.
Mettre des chaussures de travail.
B2167000
Porter des protections pour les
oreilles.
99990758
Danger d'électrocution.
Attention: charges suspendues.
Obligation. Opérations ou inter-
ventions a réaliser obligatoire-
ment.
Danger! Faire très attention.
Symboles Description
Déplacement avec chariot éléva-
teur ou transpallet.
Levage par le haut.
B1541000
Danger générique.
Porter des lunettes de sécurité.
Assistance technique nécessaire.
Il est interdit d’effectuer des répa-
rations.
Attention. Prêter particulier atten-
tion (possibles dommages maté-
riels).
Note. Indication et/ou information
utile.
Attention: ne soulever pas la
machine en ayant prise sur le
mandrin.
99990114
Plaquette flèche.
999912940
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

F
Page 6 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
99990114
99990758
999912940
999910050
•
*
999916311
999916980
999915570
999912380
♦
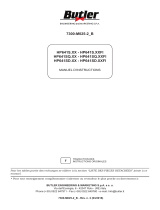
TABLE DE MISE EN PLACE DES PLAQUES
Codification des plaques
99990114 Plaquette flèche
99990758 Plaquette danger électricité
999910050 Plaquette utilisation dispositifs de protection
999912380 Plaquette valeurs de tension fréquences de fonctionnement
999912940 Plaquette soulèvement
999915570 Plaquette danger d'écrasement
999916311 Étiquette poubelle déchets
999916980 Plaquette portée 200 kg
♦
Plaquette nome machine
*
Plaquette constructeur
●
Plaquette matricule
EN CAS DE PERTE OU DE DÉCHIFFREMENT NON PARFAIT D’UNE OU DE PLUSIEURS
PLAQUES PRÉSENTES SUR LA MACHINE, IL EST NÉCESSAIRE DE REMPLACER LA/
LES PLAQUES ET DE LES COMMANDER EN CITANT LE NUMÉRO DE CODE RELATIF.
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 7 de 64
QUELQUES ILLUSTRATIONS ET/
OU ÉCRANS CONTENUES DANS
CE MANUEL ONT ÉTÉ OBTENUES
DE PHOTOS DE PROTOTYPES,
DONC LES MACHINES ET LES
ACCESSOIRES DE LA PRODUC-
TION STANDARD PEUVENT ÊTRE
DIFFÉRENTES DANS QUELQUES
COMPOSANTS/ÉCRANS .
1.0 GÉNÉRALITÉS
Le présent manuel fait partie intégrante du produit
et devra accompagner toute la vie opérationnelle
de la machine.
Lire attentivement les avertissements et les ins-
tructions contenues dans le présent manuel car ils
fournissent des indications importantes au sujet le
FONCTIONNEMENT, la SÉCURITÉ DE L’EMPLOI
et DE L’ENTRETIEN.
GARDER DANS UN LIEU CONNU ET
FACILEMENT ACCESSIBLE POUR
QUE TOUS LES UTILISATEURS
DE L’ACCESSOIRE PUISSENT LE
CONSULTER AU MOINDRE DOUTE.
L'INOBSERVATION DES INDICA-
TIONS FIGURANT SUR LE PRÉ-
SENT MANUEL PEUT ENTRAÎ-
NER DE GRAVES DANGERS ET
EXEMPTE LE CONSTRUCTEUR DE
TOUTE RESPONSABILITÉ EN CE
QUI CONCERNE LES DOMMAGES
CAUSÉS PAR CELLE-CI.
1.1 Introduction
Nous vous félicitons de l'excellent choix que vous avez
fait en achetant l'équilibreuse.
Cette machine expressément conçue pour l'utilisation
dans les garages professionnels se distingue tout parti-
culièrement par sa fiabilité, facilité, sécurité et rapidité
de travail avec un minimum d'entretien et de soin, ce
équilibreuse fonctionnera très longtemps sans aucun
problème pour votre plus grande satisfaction.
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
2.0 DESTINATION D’EMPLOI
Les machines modèle LIBRAK280RTL - LIBRAK-
280PRTL - LIBRAK280RTLC - LIBRAK280PRT-
LC, dans les différentes versions, sont des équili-
breuses véhicules automobiles, transport léger et
camions destinées à être employées exclusivement
pour objectif d'annuler ou au moins de réduire à
un niveau acceptable, les vibrations des roues, on
applique aux roues non correctement équilibrées
des masses, appelées poids, d'une valeur appropriée
et dans des positions bien déterminées.
DANGER: L’UTILISATION DE CES
MACHINES EN DEHORS DES
OPÉRATIONS POUR LESQUELLES
ELLES ONT ÉTÉ CONÇUES (INDI-
QUÉES SUR LE PRÉSENT MA-
NUEL) PEUT SE RÉVÉLER INAP-
PROPRIÉE ET DANGEREUSE.
ON NE PEUT DONC CONSIDÉRER
LE CONSTRUCTEUR RESPON-
SABLE DE DÉGÂTS ÉVENTUELS
QUI SERAIENT CAUSÉS POUR DES
EMPLOIS IMPROPRES, ERRONÉS
ET DÉRAISONNABLES.
IL EST CONSEILLÉ DE NE PAS
UTILISER L’APPAREILLAGE POUR
UN USAGE INTENSIF DANS UN
ENVIRONNEMENT INDUSTRIEL.
2.1 Préparation du personnel préposé
L’emploi de l’appareillage n’est consenti qu’au per-
sonnel entraîné expressément et autorisé.
Étant donné la complexité des opérations nécessaires
pour gérer la machine et pour effectuer les opérations
avec efficacité et sécurité, il est nécessaire que le
personnel préposé soit entraîné d’une façon correcte
pour qu’il apprenne les informations nécessaires afin
d’atteindre une façon opérationnelle en ligne avec les
indications fournies par le constructeur.
UNE LECTURE SOIGNEUSE DU
PRÉSENT MANUEL D’INSTRUC-
TIONS POUR L’UTILISATION ET
L’ENTRETIEN ET UNE BREF PÉ-
RIODE D’ACCOMPAGNEMENT AU
PERSONNEL EXPERT PEUVENT
CONSTITUER UNE PRÉPARATION
PRÉVENTIVE SUFFISANTE.

F
Page 8 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
3.0 DISPOSITIFS DE SÉCURITÉ
PÉRIODIQUEMENT, AU MOINS UNE
FOIS CHAQUE MOIS, CONTRÔLER
L'INTÉGRITÉ ET LA FONCTION-
NALITÉ DES DISPOSITIFS DE
SÉCURITÉ ET PROTECTION SUR
LA MACHINE.
• Interrupteur principal placé sur la partie posté-
rieure de la machine
Il sert pour débrancher l'alimentation électrique de
la machine.
• Carter de protection
Il sert pour protéger l'opérateur de éventuelles pro-
jection de matières présents sur la roue pendant le
lancement de la même.
Normalement, le lancement de la roue est blo-
qué lorsque le carter de protection est soulevé
(ouvert). Lorsque le carter de protection est ouvert,
il coupe le circuit qui active le moteur et prévient
le départ automatique, même en cas d'erreur.
Presser la touche de arrêt
pour arrêter la
rotation de la roue en cas de conditions d'urgence.
3.1 Risques résiduels
La machine a été soumise à une analyse complète des
risques selon la norme de référence EN ISO 12100.
Les risques ont été réduits, autant que possible, par
rapport à la technologie et à la fonctionnalité du pro-
duit.
D’éventuels risques résiduels ont été mis en évidence
par les pictogrammes et les avertissements dont le
positionnement est indiqué dans le “TABLEAU POSI-
TIONNEMENT PLAQUES“ à la page 6.
4.0 NORMES GÉNÉRALES DE SÉCU-
RITÉ
• Toute altération ou modification de l’appareillage,
quelles qu’elles soient, qui n’aient pas été autorisées
auparavant par le constructeur libèrent ce dernier
des dommages dérivant des actes indiqués ci-dessus
ou pouvant s’y référer.
• L’enlèvement ou la manipulation des dispositifs de
sécurité ou des signaux d’avertissement placés sur la
machine, peut causer un grave danger et implique une
violation des Normes Européennes sur la sécurité.
• L’emploi de la machine n’est permis que dans des
lieux dépourvus de risques d’explosion ou d’incen-
dies et en lieux secs et abrités.
• On recommande l’emploi d’accessoires et de pièces
de rechange originaux.
LE CONSTRUCTEUR DÉCLINE
CHAQUE RESPONSABILITÉ POUR
DOMMAGES CAUSÉES PAR INTER-
VENTIONS NON AUTORISÉES OU
PAR L'EMPLOI DE COMPOSANTES
OU ACCESSOIRES NON ORIGINAUX.
• L’installation doit être exécutée par un personnel
qualifié, en plein respect des instructions rapportées
ensuite.
• Contrôler que, au cours des manoeuvres opéra-
tionnelles, il ne se produise pas des conditions de
danger. Arrêter immédiatement la machine au cas
où l’on rencontrerait des irrégularités dans son fonc-
tionnement, et interpeller le service d’assistance du
revendeur autorisé.
• En cas d’urgence et avant toute opération d’entre-
tien ou de réparation, isoler la machine des sources
d’énergie, en coupant l’alimentation électrique a
l’aide de l’interrupteur principal, placé sur la même,
en levant le connecteur de la prise d’ alimentation.
• L’ installation électrique d’alimentation de la machine
doit disposer d’une mise à la terre appropriée, à
laquelle on devra brancher le conducteur jaune-vert
de protection de la machine.
• Contrôler que l’aire de travail autour de la machine
soit libre d’objets potentiellement dangereux et
qu’il ne s’y trouve pas d’huile afin d’éviter que le
caoutchouc puisse en être endommagé. En outre,
l’huile répandue sur le sol constitue un danger pour
l’opérateur.
• Il est strictement INTERDIT d'utiliser la machine
pour faire tourner autre chose qu'une roue de véhi-
cule. Des blocages non-corrects risquent de provo-
quer le dégagement des parties rotatives et de porter
préjudice à la machine, à l'opérateur ou à tout autre
chose située à proximité.
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 9 de 64
5.0 EMBALLAGE ET DÉPLACEMENT
POUR LE TRANSPORT
LES OPÉRATIONS DE MANUTENTION DES
CHARGES NE DOIVENT ÊTRE EFFECTUÉES
QUE PAR DU PERSONNEL QUALIFIE.
LE DISPOSITIF DE LEVAGE DOIT AVOIR UNE
PORTÉE CORRESPONDANT AU MOINS AU
POIDS DE LA MACHINE (VOIR PARAGRAPHE
DES “SPÉCIFICATIONS TECHNIQUES”).
La machine est emballée complètement montée. Elle
est contenue en une boîte en carton ayant les dimen-
sions suivantes: 1700x1200x1300 mm.
Le déplacement doit être effectué au moyen de trans-
palette ou chariot gerbeur.
Les points de prise des fourches sont indiqués par des
marques placées sur l’emballage.
Fig. 2
L’OPÉRATEUR DOIT PORTER DES
VÊTEMENTS DE TRAVAIL ADÉ-
QUATS, DES LUNETTES DE PRO-
TECTION ET GANTS POUR ÉVITER
DES DOMMAGES DÉRIVANT DE
LA PROJECTION DE POUSSIÈRE
NUISIBLE, D’ÉVENTUELLES PRO-
TECTIONS SACRUM-LOMBAIRES
POUR LE SOULÈVEMENT DES
PARTIES LOURDES. IL NE DOIT
PAS PORTER D’OBJETS QUI
PENDENT COMME DES BRACE-
LETS OU AUTRES OBJETS SEM-
BLABLES. LES CHEVEUX LONGS
DOIVENT ÊTRE PROTÉGÉS AVEC
DES PRÉCAUTIONS OPPORTUNES,
LES CHAUSSURES DOIVENT ÊTRE
ADAPTÉES AU TYPE D’OPÉRA-
TION À EFFECTUER.
• Les poignées et les points d’appui servant au fonc-
tionnement de la machine doivent être maintenus
propres et dégraissés.
• L’environnement de travail doit toujours être bien
propre, sec et suffisamment éclairé.
La machine ne peut être utilisée que par un seul
opérateur a la fois. Les personnes non autorisées
doivent rester a l’extérieur de la zone de fonctionne-
ment, suivant la Fig. 3.
Éviter absolument toute situation de danger. En
particulier ne pas utiliser d’outils pneumatiques ou
électriques dans des milieux humides ou glissants
et ne pas les exposer aux agents atmosphériques.
• Au cours du fonctionnement et de l’entretien de cette
machine respecter rigoureusement toutes les normes
en vigueur en matière de sécurité et de protection
contre les accidents.
L’appareil ne doit être manœuvré que par du person-
nel professionnellement qualifié.
SUR LES MODÈLES AVEC BLO-
CAGE PNEUMATIQUE DE LA ROUE,
AU COURS DES OPÉRATIONS DE
OUVERTURE/FERMETURE MAN-
DRIN FAIRE TRÈS ATTENTION DE
NE PAS APPROCHER LES MAINS
OU TOUTE AUTRE PARTIE DU
CORPS AU MANDRIN EN MOUVE-
MENT.
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

F
Page 10 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
6.0 DÉBALLAGE
AU COURS DU DÉBALLAGE POR-
TER TOUJOURS DES GANTS
AFIN D'ÉVITER TOUTES SORTES
D'ÉGRATIGNURES POUVANT ÊTRE
PROVOQUÉES PAR LE CONTACT
AVEC LE MATÉRIEL D'EMBAL-
LAGE (CLOUS, ETC.).
La boîte en carton se présente entourée de feuillards
consistant en rubans en matière plastique. Couper ces
feuillards avec des ciseaux adéquats. Avec un petit cou-
teau, pratiquer des coupures le long des axes latéraux
de la boîte et l’ouvrir à éventail.
Il est aussi possible d’effectuer le déballage en dé-
clouant la boîte en carton de la palette sur laquelle
elle est fixée. Après avoir enlevé l’emballage, s’assurer
de l’intégrité de la machine elle-même en contrôlant
qu’il n’y ait pas de parties visiblement endommagées.
En cas de doute ne pas employer la machine et
s’adresser à un personnel professionnellement qualifié
(à son propre revendeur).
Les éléments de l’emballage (sacs en plastique, polys-
tyrène expansé, clous, vis, bois, etc.) ne doivent pas
être laissés à la portée des enfants en tant que sources
potentielles de danger. Déposer les susdits matériaux
dans des lieux spéciaux pour le ramassage s’ils sont
polluants ou non biodégradables.
LA BOÎTE CONTENANT LES AC-
CESSOIRES EST CONTENUE DANS
L’ENVELOPPE. NE PAS LA JETER
AVEC L’EMBALLAGE.
7.0 DÉPLACEMENT
LE DISPOSITIF DE LEVAGE DOIT AVOIR UNE
PORTÉE CORRESPONDANTE AU MOINS AU
POIDS DE LA MACHINE (VOIR PARAGRAPHE
DES SPÉCIFICATIONS TECHNIQUES). IL NE
FAUT ABSOLUMENT PAS FAIRE OSCILLER LA
MACHINE SOULEVÉE.
NE SOULEVER JAMAIS LA MACHINE EN AYANT
PRISE SUR LE MANDRIN.
Dans le cas où la machine devrait être déplacée de
son emplacement de travail habituel à un autre, le
transport de la machine doit être effectué suivant les
instructions énumérées ci-dessous.
• Protéger les arêtes vives aux extrémités par un maté-
riau adéquat (pluribol-carton).
• Ne pas employer de câbles métalliques pour la sou-
lever.
• S’assurer que la machine soit débranchée du réseau
électrique et pneumatique.
• Repositionner la machine sur la palette originale avec
laquelle elle avait été garnie.
• Utiliser le transpalette ou le fork-lift pour la manu-
tention.
8.0 ENVIRONNEMENT DE TRAVAIL
Les caractéristiques de l'environnement de travail de
la machine doivent respecter les limites suivantes:
• température: 0° + 45° C
• humidité relative: 30 - 90% (sans rosée)
• pression atmosphérique: 860 - 1060 hPa (mbar).
Toute utilisation de la machine dans des environne-
ments ne présentant pas les caractéristiques spécifiées
ne sera admise qu’après approbation et autorisé par
le constructeur.
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 11 de 64
8.1 Aire de travail
300
800
600
Fig. 3
UTILISER LA MACHINE DANS UN ENDROIT
SEC, ET SUFFISAMMENT ÉCLAIRÉ, AUTANT
QUE POSSIBLE FERMÉ OU DE TOUTE FAÇON
PROTÉGÉ AU MOYEN D'UN ABRI ADÉQUAT ET
SATISFAISANT LES NORMES EN VIGUEUR EN
MATIÈRE DE SÉCURITÉ DU TRAVAIL.
L’installation de la machine a besoin d’un espace utile
comme il est indiqué dans la Fig. 3. Le positionnement
de la machine doit s’effectuer suivant les proportions
indiquées. De sa position de commande l’opérateur
est à même de visualiser tout l’appareil et l’aire qui
l’entoure. Il doit empêcher que ne se trouvent, dans
cette aire, des personnes non autorisées et des objets
qui pourraient représenter des sources de danger.
La machine doit être montée sur un plan horizontal, de
préférence recouvert de ciment ou de carrelage. Éviter
les plans instables ou disjoints.
La plan d’appui de la machine doit supporter les
charges transmises au cours de la phase opération-
nelle. Ce plan doit avoir une portée de 500 Kg/m² au
moins. La profondeur du sol solide doit garantir la
tenue des tampons d’ancrage.
8.2 Éclairage
La machine ne nécessite pas de lumière propre pour
les normales opérations de travail. Toutefois elle doit
être utilisée dans un endroit suffisamment éclairé.
En cas de faible luminosité utiliser des lampes avec
puissance totale de 800/1200 Watt.
SI INSTALLÉE, CHAQUE FOIS
QUE LA TIGE DE LA PIGE EST
EXTRAITE DE SON SIÈGE, LE DIS-
POSITIF D'ÉCLAIRAGE LED (FIG. 1
RÉF. 23) S'ALLUME ET REND PLUS
LUMINEUSE L'AIRE INTERNE DE
LA ROUE OÙ L'OPÉRATEUR DOIT
TRAVAILLER.
9.0 MONTAGE DE LA MACHINE
Après avoir libéré de l’emballage les différentes pièces
détachées, contrôler leur état d’intégrité, le manque
d’anomalies éventuelles, et ensuite, observer les ins-
tructions suivantes pour pourvoir à l’assemblage des
pièces elles-mêmes en suivant, comme référence, la
série d’illustrations ci-jointe.
9.1 Système d'ancrage
La machine emballée est fixée à la palette de support par
des trous prévus sur le châssis. Ces trous servent éga-
lement au fixage de la machine au sol par des tasseaux
d’ancrage (non comprises dans la fourniture). Avant d'exé-
cuter l'opération de fixage définitif, vérifier que tous les
points d’ancrage soient à plat et correctement en contact
avec la surface de fixage même. Dans le cas contraire,
insérer des cales d’ épaisseur spéciaux entre machine et la
surface inférieure de fixage, comme indiqué dans la Fig. 4.
IL EST OBLIGATOIRE DE FIXER
LA MACHINE AVEC DES VIS TAM-
PONNÉES LORSQUE LE POIDS
DES ROUES DÉPASSE 30 KG.
c
a
X
b
X
X
X
1
X
2
3
Fig. 4
a = 485
b = 240
c = 1296
• Fixer le garde-pieds (Fig. 4 réf. 2) en position au
moyen des deux vis en dotation (Fig. 4 réf. 3).
• Pratiquer 4 trous de diamètre 10 mm sur le plancher en
correspondance des trous disposés sur le châssis de fond;
• insérer les tasseaux (non comprises dans la fourni-
ture) dans les trous;
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

F
Page 12 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
GAR103
GAR113
GAR114
GAR122
A
129401060 1300A004
129480020
GAR351
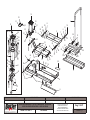
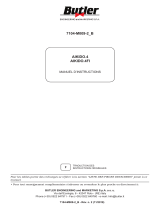
Fig. 5
L'ANNEAU PRESSEUR (FIG. 5
RÉF. A) DOIT ÊTRE MONTÉ AVEC
LE CÔTÉ DES DENTS OU DÉCHAR-
GEMENTS TOURNÉ VERS L'ÉCROU
(VOIR FIG. 5).
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
• fixer la machine au sol en utilisant 4 vis M8x80 mm
(non comprises dans la fourniture) (Fig. 4 réf. 1) (ou
4 goujons prisonniers de 8x80 mm (non comprises
dans la fourniture)). Serrer les vis avec un couple de
serrage d’environ 70 Nm.
9.2 Accessoires contenus dans l’emballage
La boîte des accessoires se trouve à l’intérieur de la
caisse d’emballage.
Contrôler qu’il s’y trouve toutes les pièces énumérées
ci-dessous (voir Fig. 5).
Pour modèle LIBRAK280RTL
Code Description N.
GAR103
Collier camions avec volant à
main + anneau presseur
1
GAR113 Cône + adaptateur camions 1
129401060 Tige externe camions 1
1300A004 Pince pour poids 1
129480020 Régleur camions 1
Pour modèle LIBRAK280PRTL
Code Description N.
GAR351
Manchon de blocage + anneau
presseur
1
GAR113 Cône + adaptateur camions 1
129401060 Tige externe camions 1
1300A004 Pince pour poids 1
129480020 Régleur camions 1
Pour modèle LIBRAK280RTLC
Code Description N.
GAR103
Collier camions avec volant à
main + anneau presseur
1
GAR114
2 cônes D. 202-221;281 ca-
mions
1
129401060 Tige externe camions 1
1300A004 Pince pour poids 1
129480020 Régleur camions 1
GAR122 Flasque appui roues camions 1
Pour modèle LIBRAK280PRTLC
Code Description N.
GAR351
Manchon de blocage + anneau
presseur
1
GAR114
2 cônes D. 202-221;281 ca-
mions
1
129401060 Tige externe camions 1
1300A004 Pince pour poids 1
129480020 Régleur camions 1
GAR122 Flasque appui roues camions 1

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 13 de 64
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
9.3 Procédures d’assemblage
9.3.1 Montage du mandrin sur la flasque
Seulement pour les modèles LIBRAK280RTL -
LIBRAK280RTLC
Visser en utilisant une clé à six pans le mandrin (Fig. 6
réf. 1) sur la flasque (Fig. 6 réf. 2).
1
2
Fig. 6
9.3.2 Montage et enlèvement du mandrin
pneumatique sur la flasque
Seulement pour les modèles LIBRAK280PRTL -
LIBRAK280PRTLC
MONTAGE
1. Après avoir réalisé la connexion électrique et pneu-
matique mettre en marche la machine (le mandrin
pneumatique s’ouvre toujours au moment de la
mise en marche). Arrêter ensuite la machine. Insé-
rer le mandrin intérieur dans la flasque et le serrer
au moyen de la clé en dotation (Fig. 7 et Fig. 8).
Fig. 7
Fig. 8

F
Page 14 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
2. Visser le mandrin intérieur jusqu’à sa position de
butée en utilisant la clé en dotation, en bloquant le
mandrin extérieur pour éviter sa rotation pendant
cette opération (Fig. 9).
Fig. 9
3. Insérer le mandrin intérieur et le serrer manuelle-
ment (Fig. 10).
Fig. 10
4. Fermer le mandrin au moyen de la pédale spéciale-
ment conçue à cet effet pour accéder à la prise de
la clé (Fig. 11).
Fig. 11
5. Bloquer le mandrin extérieur en utilisant la clé en
dotation (Fig. 12).
Fig. 12
DEPOSE
• Fermer le mandrin au moyen de la pédale spéciale-
ment conçue à cet effet pour accéder à la prise de
la clé (Fig. 11).
• Débloquer le mandrin extérieur en utilisant la clé en
dotation (Fig. 12).
• Enlever le mandrin externe, ouvrir le mandrin pneu-
matique au moyen de la pédale spécialement conçue
à cet effet et dévisser le mandrin intérieur en utilisant
la clé en dotation (Fig. 9).
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 15 de 64
9.3.3 Montage écran
1. Couper les deux colliers (Fig. 13 réf. 1) et libérer le
support (Fig. 13 réf. 2) du châssis (Fig. 13 réf. 3).
1
2
3
Fig. 13
2. Introduire le tuyau de support écran (Fig. 14
réf. 1) dans l’orifice approprié situé sur la planche
(Fig. 14 réf. 2), en interposant le carter (Fig. 14
réf. 3) en faisant passer les câbles (Fig. 14 réf. 4)
à l'intérieur.
3. Enlever le bouchon en dotation (Fig. 14 réf. 5)
de la planche (Fig. 14 réf. 2) et bloquer le tuyau
de support écran (Fig. 14 réf. 1) en serrant
le goujon (Fig. 14 réf. 6) sur la partie arrière.
Remonter le bouchon (Fig. 14 réf. 5).
5
2
1
6
1
2
3
4
4
Fig. 14
4. Brancher le câblage du clavier.
LE FIL 1 (DE COULEUR ROUGE
OU BLEUE) DOIT CORRESPONDRE
AU CONTACT 1 DU CONNECTEUR
DU CLAVIER (MARQUÉ PAR UNE
PETITE FLÈCHE).
LE FONCTIONNEMENT DU CLA-
VIER PEUT ÊTRE ESSAYÉ. EN CAS
D'INVERSION DE POLARITÉ, LE
CLAVIER NE FONCTIONNE PAS
CORRECTEMENT, MAIS IL N'Y A
AUCUN DOMMAGE.
5. Brancher les fiches sur les prises d’alimentation et
de signal de l'écran. Faire passer les câbles par le
trou dans le support.
6. Monter l'écran (Fig. 15 réf. 1) et le clavier (Fig. 15
réf. 2) au support (Fig. 15 réf. 3) avec les vis
(Fig. 15 réf. 4 et 5) et les rondelles (Fig. 15
réf. 6), fournies en dotation.
4
4
6
6
3
5
2
1
Fig. 15
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

F
Page 16 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
7. Fixer le carter (Fig. 16 réf. 1) au support (Fig. 16
réf. 2) avec les vis (Fig. 16 réf. 3) et les rondelles
(Fig. 16 réf. 4) fournies en dotation.
1
2
3
3
3
3
4
4
4
Fig. 16
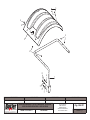
9.3.4 Montage du carter de protection
1. Monter le carter de protection (Fig. 17 réf. 1) au
support (Fig. 17 réf. 2) avec les vis (Fig. 17 réf. 3)
en interposant les rondelles (Fig. 17 réf. 4) four-
nies en dotation.
1
2
3
3
4
5
4
5
Fig. 17
9.3.5 Montage tige externe (option)
1. Introduire les 4 vis (Fig. 18 réf. 1) dans la bride de
la tige (Fig. 18 réf. 2) et les visser sur les spéciaux
rivets filetés positionnés dans la partie postérieure
du châssis. Bloquer le bras de la tige (Fig. 18
réf. 3) à la bride (Fig. 18 réf. 2) en utilisant les 2
vis (Fig. 18 réf. 4) et les rondelles (Fig. 18 réf. 5).
Bloquer les vis (Fig. 18 réf. 4) avec les rondelles
(Fig. 18 réf. 5) et les écrous (Fig. 18 réf. 6) afin
que l'arbre et le bras de la tige soient au même niveau
(voir Fig. 19).
3
5
4
5
2
6
1
1
Fig. 18
2. Faire en sorte aussi que la pointe de la tige (Fig. 19
réf. 1) se positionne au centre du mandrin.
1
Fig. 19
3. Brancher le connecteur (Fig. 20 réf. 1) du câble
provenant de l'intérieur de la machine sur le connec-
teur (Fig. 20 réf. 2) du câble qui sort du bras de
la tige. Introduire la portion de câblage avec les
connecteurs à l'intérieur du bras (Fig. 20 réf. 3).
4. Fixer le câblage à l'aide des colliers.
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 17 de 64
5. Activer la tige externe et effectuer le réglage du
dispositif.
1
2
3
Fig. 20
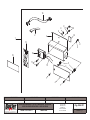
9.3.6 Montage du mesureur électronique de
Run-out (option)
1. Démonter la tige externe (Fig. 21 réf. 1) de la griffe
(Fig. 21 réf. 2) en dévissant les vis et les écrous
relatifs.
2. Monter le mesureur électronique (Fig. 21 réf. 3)
à la pige externe, comme illustré dans la Fig. 21.
3. Remonter la tige externe à la griffe en utilisant les
vis et les écrous précédemment dévissés.
1
2
2
Fig. 21
4. Démonter le couvre-roue, l'écran et la planche de
l'équilibreuse.
5. Monter la carte (Fig. 22 réf. 2)(# 18363), de la
façon illustrée dans la Fig. 22.
6. Connecter le connecteur du câble de la GAR214TK
(Fig. 22 réf. 1) à la carte électronique (Fig. 22
réf. 2)(# 18363), de la façon illustré dans la
Fig. 22 (câble réf. 4 bleu, câble réf. 5 marron
et câble réf. 6 noir). Connecter la carte (Fig. 22
réf. 2)(# 18363) du GAR214TK à la carte princi-
pale de l'équilibreuse, en utilisant le câble JP18
(Fig. 22 réf. 3) en dotation. Effectuer la connexion
de la façon illustrée par la Fig. 22.
1
2
3
JP18
3
1
4
5
6
Fig. 22
7. Fixer le câbles à l'aide des colliers de sorte qu'ils
n'entravent pas le normal fonctionnement de la
machine.
8. Remonter le couvre-roue, l'écran et la planche de
l'équilibreuse.
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

F
Page 18 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
10.0 BRANCHEMENTS ÉLECTRIQUES
MÊME LA PLUS PETITE INTER-
VENTION DE NATURE ÉLEC-
TRIQUE DOIT ÊTRE EFFECTUÉE
PAR DU PERSONNEL PROFES-
SIONNELLEMENT QUALIFIE.
AVANT DE BRANCHER LA MA-
CHINE VÉRIFIER ATTENTIVE-
MENT:
• QUE LES CARACTÉRISTIQUES
DE LA LIGNE ÉLECTRIQUE
CORRESPONDENT AUX QUALI-
TÉS REQUISES DE LA MACHINE
REPORTÉES SUR LA PLAQUE
D’IDENTIFICATION;
• QUE TOUS LES COMPOSANTS
DE LA LIGNE ÉLECTRIQUE
SONT EN BON ÉTAT;
• LA PRÉSENCE D’UNE MISE À
LA TERRE EFFICACE ET DE
DIMENSION APPROPRIÉE (SEC-
TION SUPÉRIEURE OU ÉGALE
À LA SECTION MAXIMALE DES
CÂBLES D’ALIMENTATION);
• QUE L’INSTALLATION ÉLEC-
TRIQUE EST DOTÉE DE DIS-
JONCTEUR AVEC PROTECTION
DIFFÉRENTIELLE ÉTALONNÉE
À 30 mA.
Brancher la machine sur le réseau en introduisant la
fiche à 3 pôles en dotation (230 V monophasée).
Si la fiche en dotation n'est pas indiquée pour la prise
présente sur le mur, il faut la changer conformément
aux lois locales et aux normes et réglementations en
vigueur. Cette opération est du ressort d'un personnel
expert et qualifié.
APPLIQUER AU CÂBLE DE LA
MACHINE UNE FICHE CONFORME
AUX CONDITIONS MENTIONNÉES
CI-DESSUS (LE FIL DE MISE À LA
TERRE EST DE COULEUR JAUNE/
VERTE ET NE DOIT ÊTRE JAMAIS
CONNECTÉ À L’UNE DES DEUX
PHASES). L’INSTALLATION ÉLEC-
TRIQUE D’ALIMENTATION DOIT
ÊTRE ADAPTÉE AUX DONNÉES
D’ABSORPTION SPÉCIFIÉES DANS
LE PRÉSENT MANUEL ET DOIT
POUVOIR GARANTIR UNE CHUTE
DE TENSION A PLEINE CHARGE
NON SUPÉRIEURE A 4% (10% EN
PHASE DE DÉMARRAGE) DE LA
VALEUR NOMINALE.
LA NON-OBSERVATION DES INS-
TRUCTIONS REPORTÉES CI-DES-
SUS ENTRAINE LA PERTE IMMÉ-
DIATE DU DROIT DE GARANTIE.
10.1 Contrôles électriques
AVANT LA MISE EN SERVICE DE
L'ÉQUILIBREUSE, IL FAUDRA
CONNAÎTRE LA POSITION ET
LA MODALITÉ DE FONCTIONNE-
MENT DE TOUS LES ÉLÉMENTS
DE COMMANDE ET EN VÉRIFIER
LEUR EFFICACITÉ (À CE PROPOS,
CONSULTER LE PARAGRAPHE
“COMMANDES”).
VÉRIFIER TOUS LES JOURS,
AVANT DE COMMENCER À UTILI-
SER LA MACHINE, LE CORRECT
FONCTIONNEMENT DE LES COM-
MANDES AVEC ACTIONNEMENT
MAINTENU.
Une fois le branchement prise/bonde a été effectué,
mettre la machine en marche au moyen de l’interrup-
teur général (Fig. 23 réf. 1).
1
Fig. 23
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC

MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
F
Page 19 de 64
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
11.0 BRANCHEMENT PNEUMATIQUE
Raccorder l'équilibreuse à l'installation d'air comprimé
du garage au moyen du raccord spécial qui se trouve
sur la partie postérieure de l'équilibreuse, (voir Fig. 24
réf. 1).
L’installation pneumatique qui alimente la machine doit
être en mesure de fournir de l'air filtré et déshumidifié
à une pression comprise entre 8 et 10 bars. Elle doit
être équipée d'une valve d'interception, en amont de
la machine.
1
Fig. 24
Seulement pour les modèles LIBRAK280RTL -
LIBRAK280RTLC
1
Seulement pour les modèles LIBRAK280PRTL -
LIBRAK280PRTLC
12.0 MONTAGE DE LA ROUE SUR LE
MANDRIN
Pour obtenir un équilibrage parfait, il faut effectuer un
montage soigné de la roue sur le mandrin. Un centrage
non-parfait provoque inévitablement des balourds.
IL EST IMPORTANT D'UTILISER
DES CÔNES ET DES ACCES-
SOIRES D'ORIGINE, FABRIQUÉS
SPÉCIALEMENT POUR L'ÉQUILI-
BREUSE.
Ci-après, nous avons illustré le montage de la roue au
moyen des cônes fournis en dotation. Pour d'autres
montages qui nécessitent de l'utilisation d'accessoires
en option, consulter les instructions spéciales fournies
séparément.
12.1 Montage de la roue
Seulement pour les modèles LIBRAK280PRTL -
LIBRAK280PRTLC
1. Ouvrir le mandrin pneumatique en appuyant sur la
pédale spéciale voir Fig. 25).
Fig. 25
Ouvre/ferme le mandrin
pneumatique
Pour tous les modèles
2. déplacer vers droite la roue (Fig. 26 réf. 1).
Insérer la flasque adaptateur (Fig. 26 réf. 2-3) sur
la flasque du mandrin (Fig. 26 réf. 4).
3. Libérer la roue (Fig. 26 réf. 5) de tout corps étran-
ger: poids déjà existants, pierres et boue, et s'assu-
rer que le mandrin (Fig. 26 réf. 6) et la zone de
centrage de la jante soient propres, avant de monter
et fixer la roue sur le mandrin.

F
Page 20 de 64
MANUEL D'INSTRUCTIONS
EMPLOI ET ENTRETIEN
1294-M017-1_B
LIBRAK280RTL - LIBRAK280PRTL - LIBRAK280RTLC - LIBRAK280PRTLC
4. Positionner la roue (Fig. 26 réf. 5) sur l'appui roue
(Fig. 26 réf. 1) avec la côté interne de la jante vers
l'équilibreuse. Actionner la commande de l'élévateur
(Fig. 26 réf. 7) et, en le maintenant soulevé, faire
monter le marchepied (Fig. 26 réf. 8) et centrer
manuellement la roue sur le mandrin avec un effort
minimum, indépendamment du poids de la même.
APRÈS AVOIR ATTEINTE LA HAU-
TEUR DÉSIRÉE, RELÂCHER LA
COMMANDE DE L'ÉLÉVATEUR.
5. déplacer vers gauche la roue (Fig. 26 réf. 1).
1
2
4
6
7
5
3
8
Fig. 26
LIBRAK280RTLC
LIBRAK280PRTLC
LIBRAK280RTL
LIBRAK280PRTL
6. Monter le cône (Fig. 27 réf. 1 ou 2) contre la
roue (Fig. 27 réf. 3) à équilibrer. Il est pos-
sible de monter le cône (Fig. 27 réf. 1) (LI-
BRAK280RTL - LIBRAK280PRTL) dans les
deux sens, en fonction du diamètre de l'orifice
de centrage ou monter le cône (Fig. 27 réf. 2)
(LIBRAK280RTLC - LIBRAK280PRTLC) avec
la partie plus étroite tournée vers la roue.
Le choix de ces accessoires est lié à la forme de la
jante.
7. Introduire l'anneau presseur (Fig. 27 réf. 4) dans
la bague volant (Fig. 27 réf. 5) (LIBRAK280RTL
- LIBRAK280RTLC) ou dans le manchon (Fig. 27
réf. 6) (LIBRAK280PRTL - LIBRAK280PRTLC) et
visser tout contre le cône (Fig. 27 réf. 1 ou 2).
Fig. 27
1
3
4
5
2
6
LIBRAK280RTLC
LIBRAK280PRTLC
LIBRAK280RTL
LIBRAK280PRTL
LIBRAK280RTL
LIBRAK280RTLC
LIBRAK280PRTL
LIBRAK280PRTLC
L'ANNEAU PRESSEUR (FIG. 27
RÉF. 4) DOIT ÊTRE MONTÉ AVEC
LE CÔTÉ DES DENTS TOURNÉ
VERS L'ÉCROU (FIG. 27 RÉF. 5)
OU LE MANCHON (FIG. 27 RÉF. 6).
8. Baisser le commande de l'élévateur (Fig. 28 réf. 1)
et ensuite faire descendre le marchepied (Fig. 28
réf. 2).
1
2
Fig. 28
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
La page charge ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91



























































































Butler Librak280RTLC Pro Le manuel du propriétaire
- Taper
- Le manuel du propriétaire
Documents connexes
-
 Butler Librak430P.3DTech Pro RAL 3002 Le manuel du propriétaire
Butler Librak430P.3DTech Pro RAL 3002 Le manuel du propriétaire
-
 Butler Librak380PWS Pro Le manuel du propriétaire
Butler Librak380PWS Pro Le manuel du propriétaire
-
Butler Librak340Touch Pro Le manuel du propriétaire
-
 Butler HP641SD.24 Pro Le manuel du propriétaire
Butler HP641SD.24 Pro Le manuel du propriétaire
-
 Butler Librak355PWS Pro Le manuel du propriétaire
Butler Librak355PWS Pro Le manuel du propriétaire
-
 Butler NAV51.15 Premium Le manuel du propriétaire
Butler NAV51.15 Premium Le manuel du propriétaire
-
 Butler Karacter.TLX Premium-MB Le manuel du propriétaire
Butler Karacter.TLX Premium-MB Le manuel du propriétaire
-
Butler HP441SQ.22 Pro Le manuel du propriétaire
-
 Butler Aikido.4 Premium Le manuel du propriétaire
Butler Aikido.4 Premium Le manuel du propriétaire
-
 Butler Seido.30 Premium Le manuel du propriétaire
Butler Seido.30 Premium Le manuel du propriétaire








