La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...

54
Table des matières: page
1 Avertissements 55
2 Description du produit et type d'utilisation 56
2.1 Limites d'utilisation 56
2.2 Installation typique 58
2.3 Liste des câbles 58
3 Installation 59
3.1 Contrôles préliminaires 59
3.2 Fixation de l'opérateur 59
3.3 Fixation des pattes de fin de course dans les
versions avec fin de course inductif 60
3.4 Installation des divers dispositifs 61
3.5 Connexions électriques 61
3.6 Description des connexions électriques 62
4 Contrôles finaux et mise en service 62
4.1 Sélection de la direction 62
4.2 Branchement au secteur 62
4.3 Reconnaissance des dispositifs 62
4.4 Reconnaissance de la longueur du portail 63
4.5 Vérification du mouvement du portail 63
4.6 Fonctions préprogrammées 63
4.7 Récepteur radio 63
5 Essai et mise en service 63
5.1 Essai 64
5.2 Mise en service 64
6 Maintenance et mise au rebut 64
6.1 Maintenance 64
6.2 Mise au rebut 64
7 Approfondissements 65
7.1 Touches de programmation 65
7.2 Programmations 65
7.2.1 Fonctions premier niveau (fonctions ON-OFF) 65
7.2.2 Programmation du premier niveau
(fonctions ON-OFF) 66
7.2.3 Fonctions deuxième niveau
(paramètres réglables) 66
7.2.4 Programmation deuxième niveau
(paramètres réglables) 67
7.2.5 Exemple de programmation premier niveau
(fonctions ON-OFF) 68
7.2.6 Exemple de programmation deuxième niveau
(paramètres réglables) 68
7.3 Ajout ou enlèvement de dispositifs 68
7.3.1 BlueBUS 68
7.3.2 Entrée STOP 69
7.3.3 Photocellules 69
7.3.4 Photodétecteur FT210B 69
7.3.5 ROBUS en mode “Slave” 70
7.3.6 Reconnaissance d'autres dispositifs 71
7.4 Fonctions particulières 71
7.4.1 Fonction “Ouvre toujours” 71
7.4.2 Fonction “Manœuvre dans tous les cas” 71
7.4.3 Avis de maintenance 71
7.5 Connexion d'autres dispositifs 72
7.6 Résolution des problèmes 73
7.6.1 Liste historique des anomalies 73
7.7 Diagnostic signalisations 73
7.7.1 Signalisations avec le clignotant 74
7.7.2 Signalisations sur la logique de commande 74
7.8 Accessoires 75
8 Caractéristiques techniques 76
Instructions et recommandations destinées à l'utilisateur
de l'opérateur ROBUS 77
Robus
600/600P
1000/1000P

55
F
1) Avertissements
Ce manuel d'instructions contient des informations importantes concer-
nant la sécurité pour l'installation, il faut lire toutes les instructions avant
de procéder à l'installation. Conserver avec soin ce manuel également
pour des consultations futures.
Compte tenu des dangers qui peuvent se vérifier durant l'installation et
l'utilisation de ROBUS, pour le maximum de sécurité il faut que l'instal-
lation soit faite dans le plein respect des lois, normes et règlements.
Dans ce chapitre, nous donnons des recommandations d'ordre général;
d'autres recommandations importantes se trouvent dans les chapitres
“3.1 Contrôles préliminaires”; “5 Essai et mise en service”
D'après la législation européenne la plus récente, la réa-
lisation d'une porte ou d'un portail automatique est régle-
mentée par la Directive 98/37/CE (Directive Machines) et en
particulier par les normes: EN 13241-1 (norme harmonisée),
EN 12445, EN 12453 et EN 12635 qui permettent de déclarer
la conformité à la directive machines.
D'autres informations et les conseils pour l'analyse des risques et la réa-
lisation du dossier technique sont disponibles sur le site: www.nicefo-
ryou.com.
Le présent manuel est destiné uniquement au personnel technique qua-
lifié pour l'installation. À part l'encart spécifique “Instructions et recom-
mandations destinées à l'utilisateur de l'opérateur ROBUS” qui sera
détaché par l'installateur, aucune autre information contenue dans la
présente notice ne peut être considérée comme intéressante pour l'uti-
lisateur final!
• Une utilisation de ROBUS différente de ce qui est prévu dans cette
notice est interdite; des utilisations impropres peuvent être source de
dangers ou de dommages aux personnes et aux choses.
• Avant de commencer l'installation, il faut effectuer l'analyse des
risques comprenant la liste des conditions de sécurité requises par
l'annexe I de la Directive Machines, en indiquant les solutions adop-
tées.
Nous rappelons que l'analyse des risques est l'un des documents qui
constituent le “dossier technique” de l'automatisation.
• Vérifier la nécessité d'autres dispositifs pour compléter l'automatisa-
tion avec ROBUS suivant les conditions spécifiques de l'application et
les risques présents; il faut considérer par exemple les risques d'im-
pact, écrasement, cisaillement, coincement, etc., et d'autres dangers
en général.
• Ne pas effectuer de modifications sur aucune des parties si elles ne
sont pas prévues dans le présent manuel. Des opérations de ce type
entraîneront obligatoirement des problèmes de fonctionnement. NICE
décline toute responsabilité pour les dommages dérivant de produits
modifiés.
• Pendant l'installation et l'utilisation, éviter que des parties solides ou
liquides puissent pénétrer à l'intérieur de la logique de commande ou
d'autres composants ouverts; s'adresser éventuellement au service
d'assistance NICE; l'utilisation de ROBUS dans de telles circons-
tances peut créer des situations de danger
• L'automatisme ne peut pas être utilisé avant d'avoir effectué la mise
en service comme l'explique le chapitre: “5 Essai et mise en service”.
• L'emballage de ROBUS doit être mis au rebut dans le plein respect
des normes locales en vigueur.
• Dans le cas de panne qui ne peut pas être résolue avec les informa-
tions données dans ce manuel, contacter le service après-vente NICE.
• Si des interrupteurs automatiques ou des fusibles interviennent, avant
de les réarmer il faut identifier la cause de leur déclenchement et l'éli-
miner.
• Avant d'accéder aux bornes situées sous le carter de ROBUS décon-
necter tous les circuits d'alimentation; si le dispositif de déconnexion
n'est pas visible, accrocher un panonceau: “ATTENTION MAINTE-
NANCE EN COURS”.
Avertissements particuliers sur l'appropriation à l'utilisation de ce produit
par rapport à la Directive “Machines” 98/37/CE (ex 89/392/CEE):
• Ce produit est mis sur le marché comme “composant de machine” et
est donc construit pour être incorporé dans une machine ou pour être
assemblé avec d'autres appareillages afin de réaliser “une machine”
selon les termes de la Directive 98/37/CE seulement en association
avec les autres composants et dans les modes décrits dans ce
manuel d'instructions. Comme le prévoit la directive 98/37/CE nous
rappelons que la mise en service de ce produit n'est pas autorisée tant
que le constructeur de la machine dans laquelle ce produit est incor-
poré ne l'a pas identifié et déclaré conforme à la directive 98/37/CE.
Avertissements particuliers sur l'appropriation à l'utilisation de ce produit
par rapport à la Directive “Basse Tension” 73/23/CEE et modification
successive 93/68/CEE:
• Ce produit est conforme aux caractéristiques requises par la Directive
“Basse Tension” s'il est employé pour l'application et dans les confi-
gurations prévues dans ce manuel d'instructions et en association
avec les articles présents dans le catalogue produits de Nice S.p.a.
Les caractéristiques pourraient ne pas être garanties si le produit est
utilisé dans des configurations ou avec d'autres produits non prévus;
l'utilisation du produit dans ces situations est interdite tant que l'on a
pas vérifié que les critères prévus par la directive sont respectés.
Avertissements particuliers sur l'appropriation à l'utilisation de ce produit
par rapport à la Directive “Compatibilité électromagnétique” 89/336/CEE
et modifications successives 92/31/CEE et 93/68/CEE:
• ce produit a été soumis aux essais relatifs à la compatibilité électro-
magnétique dans les situations d'utilisation les plus critiques, dans les
configurations prévues dans ce manuel d'instructions et associé avec
les articles présents dans le catalogue de produits de Nice S.p.A. La
compatibilité électromagnétique pourrait ne pas être garantie si le pro-
duit est utilisé dans des configurations ou avec d'autres produits non
prévus; l'utilisation du produit dans ces situations est interdite tant que
l'on n'a pas vérifié que les critères prévus par la directive sont respec-
tés.
!

56
ROBUS est une ligne d'opérateurs électromécaniques irréversibles
destinés à l'automatisation de portails coulissants. Ils disposent
d'une logique électronique de commande et d'un connecteur pour
le récepteur de la radiocommande SMXI ou SMXIS (en option). Les
connexions électriques vers les dispositifs extérieurs sont simplifiées
grâce à la technique “BlueBUS” qui permet de connecter plusieurs
dispositifs avec seulement 2 fils. ROBUS fonctionne à l'énergie élec-
trique, en cas de coupure du courant, il est possible de débrayer
l'opérateur avec une clé spéciale et de manœuvrer le portail à la
main. En alternative, on peut utiliser l'accessoire en option: la batte-
rie tampon PS124 qui permet quelques manœuvres même en l'ab-
sence du courant de secteur.
Les produits décrits dans le tableau 1 font partie de la ligne ROBUS.
Note: 1 kg = 9,81 N donc par exemple: 600 N = 61 kg
2) Description du produit et type d'utilisation
1
Opérateur type RB600 RB600P RB1000 RB1000P
Type de fin de course électromécanique de proximité inductif électromécanique de proximité inductif
Longueur maximum du portail 8m 12m
Poids maximum du portail 600Kg 1000Kg
Couple maximum au démarrage 18Nm 27Nm
(correspondant à une force de) (600N) (900N)
Moteur et transformateur Moteur 24Vcc Ø 77mm Moteur 24Vcc Ø 115mm
Transformateur à colonne EI Transformateur toroïdal
Tableau 1: comparaison des caractéristiques essentielles des opérateurs ROBUS
2.1) Limites d'utilisation
Les données relatives aux performances de ROBUS figurent dans le
chapitre “8 Caractéristiques techniques” et sont les seules valeurs
qui permettent d'évaluer correctement si l'opérateur est adapté à
l'application.
Les caractéristiques structurales des produits ROBUS permettent
de les utiliser sur des portails coulissants, dans les limites indiquées
dans les tableaux 2, 3 et 4.
Le fait que ROBUS soit réellement adapté à automatiser un portail
donné dépend des frictions et d'autres phénomènes, qui peuvent
être occasionnels, comme la présence de glace qui pourrait bloquer
le mouvement du portail.
Pour une vérification réelle, il est absolument indispensable de
mesurer la force nécessaire pour manœuvrer le portail sur toute sa
course et contrôler que la force ne dépasse pas la moitié du “couple
nominal” indiqué au chapitre “8 Caractéristiques techniques”
(nous conseillons une marge de 50% car des conditions climatiques
critiques peuvent faire augmenter les frictions); par ailleurs, pour établir
le nombre de cycles/heure, les cycles consécutifs et la vitesse maxi-
mum autorisée, il faut considérer les données des tableaux 2 et 3.
RB600, RB600P RB1000, RB1000P
Longueur du portail (m) cycles/heure maximums
cycles consécutifs maximums
cycles/heure maximums
cycles consécutifs maximums
Jusqu'à 4 40 20 50 25
4 ÷ 6 25 13 33 16
6 ÷ 8 20 10 25 12
8 ÷ 10 --- --- 20 10
10 ÷ 12 --- --- 16 8
Tableau 2: limites suivant la longueur du portail
330mm 210mm
303mm
92mm

57
F
La longueur du portail permet de calculer le nombre maximum de cycles à l'heure et de cycles consécutifs tandis que le poids permet de calcu-
ler le pourcentage de réduction des cycles et la vitesse maximum admissible; par exemple, pour ROBUS 1000, si le portail mesure 5 m de long,
on peut avoir 33 cycles/heure et 16 cycles consécutifs mais si le portail pèse 700 kg, il faut les réduire à 50%, soit 16 cycles/heure et environ 8
cycles consécutifs tandis que la vitesse maximum admissible est V4: rapide. Pour éviter les surchauffes, la logique de commande prévoit un limi-
teur de manœuvres qui se base sur l'effort du moteur et la durée des cycles en intervenant quand la limite maximum est dépassée. Le limiteur de
manœuvres mesure aussi la température ambiante en réduisant encore plus les manœuvres en cas de température particulièrement élevée.
Le chapitre “8 Caractéristiques techniques” donne une estimation de “durabilité” c'est-à-dire de vie économique moyenne du produit. La valeur
est fortement influencée par l'indice de charge de travail des manœuvres, c'est-à-dire la somme de tous les facteurs qui concourent à l'usure.
Pour effectuer l'estimation, il faut additionner tous les indices de charge de travail du tableau 4, puis avec le résultat total, vérifier dans le graphique
la durabilité estimée.
Par exemple, ROBUS 1000 sur un portail de 650 kg, de 5 m de long, équipé de photocellules et sans autres éléments de fatigue, obtient un indi-
ce de charge de travail égal à 50% (30+10+10). D'après le graphique, la durabilité estimée est de 80.000 cycles.
RB600, RB600P RB1000, RB1000P
Poids portail en (kg) Pourcentage cycles Vitesse maximum Pourcentage cycles Vitesse maximum
admissible admissible
Jusqu'à 200 100% V6 = Super rapide 100% V6 = Super rapide
200 ÷ 400 80 V5 = Très rapide 90 V5 = Très rapide
400 ÷ 500 60 V4 = Rapide 75 V4 = Rapide
500 ÷ 600 50 V3 = Moyenne 60 V4 = Rapide
600 ÷ 800 --- --- 50 V3 = Moyenne
800 ÷ 900 --- --- 45 V3 = Moyenne
900 ÷ 1000 --- --- 40 V3 = Moyenne
Tableau 3: limites suivant le poids du portail
Indice de charge de travail % Robus Durabilité en cycles
600 1000
Poids du portail en kg
Jusqu'à 200 10 5
200 ÷ 400 30 10
400 ÷ 600 50 20
600 ÷ 700 --- 30
700 ÷ 800 --- 40
800 ÷ 900 --- 50
900 ÷ 1000 --- 60
Longueur du portail en mètres
Jusqu'à 4 10 5
4 ÷ 6 20 10
6 ÷ 8 35 20
8 ÷ 10 --- 35
10 ÷ 12 --- 50
Autres éléments de fatigue
(à considérer si la probabilité
qu'ilsse vérifient est supérieure à 10 % )
Température ambiante supérieure à 40°C ou
inférieure à 0°C ou humidité supérieure à 80%
10 10
Présence de poussière ou de sable 15 15
Présence de sel 20 20
Interruption manœuvre par Photo 15 10
Interruption manœuvre par Halte 25 20
Vitesse supérieure à “L4 rapide” 20 15
Augm. du couple au démarrage activée 25 20
Total indice de charge de travail:
N.B.: si l'indice de charge de travail dépasse 100%, cela veut dire que l'on a dépassé les conditions d'acceptabilité; nous conseillons d'utiliser un
modèle de taille supérieure.
Tableau 4: estimation de la durabilité en fonction de l'indice de charge de travail de la manœuvre
Indice de charge de travail %
Durabilité en cycles

58
2.2) Installation typique
La figure 2 présente l'installation typique pour l'automatisation d'un portail de type coulissant utilisant ROBUS
2
1 Sélecteur à clé
2 Photocellules sur colonne
3 Photocellules
4 Bord primaire fixe (option)
5 Bord primaire mobile
6 Patte de fin de course “Ouvert”
7 Crémaillère
8 Bord secondaire fixe (option)
9 Clignotant avec antenne incorporée
10 ROBUS
11 Patte de fin de course “Fermé”
12 Bord secondaire mobile (option)
13 Émetteur radio
2.3) Liste des câbles
Dans l'installation typique de la figure 2 sont indiqués aussi les câbles nécessaires pour les connexions des différents dispositifs; le tableau
5 indique les caractéristiques des câbles.
Les câbles utilisés doivent être adaptés au type d'installation; par exemple, on conseille un câble type H03VV-F pour la pose
à l'intérieur ou H07RN-F pour la pose à l'extérieur.
!
Note 1: si le câble d'alimentation dépasse 30 m, il faut prévoir un câble avec une section plus grande, par exemple 3 x 2,5 mm_ et une
mise à la terre est nécessaire à proximité de l'automatisme.
Note 2: si le câble “BlueBUS” dépasse 30 m, jusqu'à un maximum de 50 m, il faut prévoir un câble 2 x 1
mm
2
.
Note 3: les deux câbles 2 x 0,5
mm
2
peuvent être remplacés par un seul câble 4 x 0,5 mm
2
.
Note 4: s'il y a plus d'un bord sensible, voir le chapitre “7.3.2 Entrée STOP” pour le type de connexion conseillée.
Note 5: pour la connexion des bords sensibles mobiles sur les parties coulissantes, il faut utiliser des dispositifs ad hoc qui permettent la
connexion même quand le portail est en mouvement.
Connexion Type de câble Longueur maximum admise
A: Ligne électrique d'alimentation 1 câble 3 x 1,5 mm
2
30 m (note 1)
B: Clignotant avec antenne 1 câble 2 x 0,5 mm
2
20m
1 câble blindé type RG58 20m (longueur conseillée: moins de 5 m)
C: Photocellules 1 câble 2 x 0,5 mm
2
30 m (note 2)
D: Sélecteur à clé 2 câbles 2 x 0,5 mm
2
(note 3) 50 m
E: Bords sensibles fixes 1 câble 2 x 0,5 mm
2
(note 4) 30 m
F: Bords sensibles mobiles 1 câble 2 x 0,5 mm
2
(note 4) 30 m (note 5)
Tableau 5: Liste des câbles
2
43 38
10
2
6
11
7
9
13
1251
EC F
D
C
F
A
B

59
F
3.2) Fixation de l'opérateur
Si la surface d'appui existe déjà, la fixation de l'opérateur doit être effec-
tuée directement sur la surface en utilisant des moyens adéquats par
exemple avec des chevilles à expansion. Autrement, pour fixer l'opéra-
teur:
1. Creuser un trou de fondation de dimensions adéquates en suivant
les mesures indiquées dans la Figure 3.
2. Prévoir un ou plusieurs conduits pour le passage des câbles com-
me dans la Figure 4.
3. Assembler les deux agrafes sur la plaque de fondation en plaçant
un écrou en dessous et un au-dessus de la plaque; l'écrou sous
la plaque doit être vissé à fond comme dans la figure 5 de manière
que la partie filetée de l'agrafe dépasse d'environ 25÷35 mm au-
dessus de la plaque.
4. Effectuer la coulée en ciment et avant qu'il commence à prendre,
mettre la plaque de fondation en respectant les distances indiquées
dans la figure 3; vérifier qu'elle est parallèle au portail et parfaitement
de niveau (fig. 6). Attendre la prise complète du ciment.
5. Enlever les 2 écrous sur le dessus de la plaque puis y poser l'opé-
rateur; vérifier qu'il est parfaitement parallèle au portail puis visser
légèrement les 2 écrous et les rondelles fournies comme dans la
figure 7.
L'installation de ROBUS doit être effectuée par du personnel qualifié, dans le respect des lois, des normes et des règle-
ments ainsi que de toutes les instructions de ce manuel.
!
3) Installation
3.1) Contrôles préliminaires
Avant de continuer l'installation de ROBUS il faut effectuer les
contrôles suivants:
• Vérifier que tout le matériel à utiliser est en excellent état, adapté à
l'usage et conforme aux normes.
• Vérifier que la structure du portail est adaptée pour être équipée
d'un automatisme.
• Vérifier que le poids et les dimensions du portail rentrent dans les
limites d'utilisation indiquées au chapitre “2.1 Limites d'utilisation”.
• Vérifier, en comparant avec les valeurs figurant dans le chapitre “8
Caractéristiques techniques”, que la force nécessaire pour mettre le
portail en mouvement est inférieure à la moitié du “Couple maxi-
mum” et que la force nécessaire pour maintenir le portail en mouve-
ment est inférieure à la moitié du “Couple nominal”; on conseille une
marge de 50% sur les forces car les conditions climatiques adverses
peuvent faire augmenter les frictions.
• Vérifier que dans la course du portail, aussi bien en fermeture qu'en
ouverture, il n'y a pas de points présentant une plus grande friction.
• Vérifier que le portail ne risque pas de dérailler et de sortir des rails
de guidage.
• Vérifier la robustesse des butées mécaniques de limitation de la
course en contrôlant qu'il n'y a pas de déformations même en cas
de heurt violent du portail sur la butée.
• Vérifier que le portail est bien équilibré, c'est-à-dire qu'il ne doit pas
bouger s'il est laissé arrêté dans une position quelconque.
• Vérifier que la zone de fixation de l'opérateur n'est pas sujette à
inondation; éventuellement, monter l'opérateur suffisamment soule-
vé par rapport au sol.
• Vérifier que la zone de fixation de l'opérateur permet la manœuvre
de débrayage de manière facile et sûre.
• Vérifier que les points de fixation des différents dispositifs se trouvent
dans des endroits à l'abri des chocs et que les surfaces sont suffi-
samment solides.
• Éviter que les parties de l'automatisme puissent être immergées
dans l'eau ou dans d'autres substances liquides.
• Ne pas placer ROBUS à proximité de flammes ou de sources de
chaleur, dans des atmosphères potentiellement explosives, particu-
lièrement acides ou salines; cela pourrait endommager ROBUS et
causer des problèmes de fonctionnement ou des situations de dan-
ger.
• Si le portail coulissant est muni d'un portillon pour le passage de pié-
tons incorporé ou dans la zone de manœuvre du portail, il faut s'as-
surer que ce portillon ne gêne pas la course normale et prévoir éven-
tuellement un système d'interverrouillage.
• Connecter la logique de commande à une ligne d'alimentation élec-
trique avec mise à la terre.
• La ligne d'alimentation électrique doit être protégée par un disjonc-
teur magnétothermique associé à un déclencheur différentiel.
• Sur la ligne d'alimentation du secteur électrique, il faut monter un
dispositif de déconnexion de l'alimentation (avec catégorie de sur-
tension III, c'est-à-dire avec une distance entre les contacts d'au
moins 3,5 mm) ou bien un autre système équivalent par exemple pri-
se + fiche. Si le dispositif de déconnexion de l'alimentation ne se
trouve pas à proximité de l'automatisme, il faut disposer d'un systè-
me de blocage contre la connexion accidentelle ou non autorisée.
3
4
5
6
25÷35
7
192
330 0÷50
0÷50 330
192
0÷10
0÷10

60
3.3) Fixation des pattes de fin de course dans les versions avec fin de course de proximité inductif
Pour éviter que le portail pèse trop sur l'opérateur, il
est important qu'il y ait un jeu d'1÷2 entre la crémaillère
et le pignon, comme dans la figure 10.
8. Faire coulisser le portail et utiliser toujours le pignon comme réfé-
rence pour fixer les autres éléments de la crémaillère.
9. Couper l'éventuelle partie de crémaillère qui dépasse sur le der-
nier segment.
10. Effectuer différentes manœuvres d'ouverture et de fermeture du
portail à la main et vérifier que la crémaillère coulisse alignée au
pignon avec un désalignement maximum de 5 mm, et qu'il y a un
jeu d'1÷2 mm entre le pignon et la crémaillère sur toute la longueur.
11. Serrer énergiquement les écrous de fixation de l'opérateur en
s'assurant qu'il est bien fixé au sol; couvrir les écrous de fixation
avec les bouchons comme dans la figure 11.
12. Fixer les pattes de fin de course suivant la description donnée ci-
après (pour les versions RB600P et RB1000P fixer les pattes
suivant la description du “3.3 Fixation des pattes de fin de cour-
se dans les versions avec fin de course de proximité inductif”):
• Porter manuellement le portail en position d'ouverture en s'ar-
rêtant à au moins 2 - 3 cm de la butée mécanique.
• Faire coulisser la patte sur la crémaillère dans le sens de l'ouver-
ture jusqu'à l'intervention du fin de course. Faire avancer ensuite
la patte d'au moins 2 cm puis la bloquer sur la crémaillère avec
les goujons correspondants comme sur la figure 12.
• Effectuer la même opération pour le fin de course de fermeture.
13.Bloquer l'opérateur comme l'indique le paragraphe “Débrayage
et mouvement manuel” dans le chapitre “Instructions et recom-
mandations destinées à l'utilisateur.
!
8 9 10
11 12
Si la crémaillère est déjà présente, après avoir fixé l'opérateur, agir sur
les goujons de réglage comme dans la figure 8 pour mettre le pignon
de ROBUS à la hauteur qui convient en laissant 1÷2 mm de jeu de la
crémaillère. Autrement, pour fixer la crémaillère, il faut:
6. Débrayer l'opérateur suivant les indications du paragraphe “Débraya-
ge et manœuvre manuelle” dans le chapitre “Instructions et recom-
mandations destinées à l'utilisateur de l'opérateur ROBUS”.
7. Ouvrir complètement le portail, poser sur le pignon le premier seg-
ment de crémaillère et vérifier que le début de la crémaillère corres-
pond au début du portail comme sur la figure 9. Vérifier la présen-
ce d'un jeu d'1÷2 mm entre le pignon et la crémaillère, puis fixer la
crémaillère sur le portail avec des moyens adéquats.
1÷2
Pour les versions RB600P et RB1000P qui utilisent le fin de course
de proximité inductif, il faut fixer les pattes de fin de course suivant
les indications données ci-après.
1. Porter manuellement le portail en position d'ouverture en s'arrê-
tant à au moins 2 - 3 cm de la butée mécanique.
2. Faire coulisser la patte sur la crémaillère dans le sens de l'ouver-
ture jusqu'à l'extinction de la led correspondante, comme dans la
figure 13. Faire avancer ensuite la patte d'au moins 2 cm puis la
bloquer sur la crémaillère avec les goujons correspondants.
3. Porter manuellement le portail en position de fermeture en s'arrê-
tant à au moins 2 - 3 cm de la butée mécanique.
4. Faire coulisser la patte sur la crémaillère dans le sens de la fer-
meture jusqu'à l'extinction de la led correspondante. Faire avan-
cer ensuite la patte d'au moins 2 cm puis la bloquer sur la cré-
maillère avec les goujons correspondants.
Attention: dans le fin de course de proximité inductif, la
distance optimale de la patte est comprise entre 3 et 8 mm,
comme l'indique la figure 14.
!
13
14
3÷8

61
F
3.5) Connexions électriques
Toutes les connexions électriques doivent être effectuées
en l'absence de tension dans l'installation et avec l'éventuel-
le batterie tampon déconnectée.
1. Pour éliminer le couvercle de protection et accéder à la logique élec-
tronique de commande de ROBUS il faut enlever la vis sur le côté et
retirer le couvercle en le tirant vers le haut.
2. Enlever la membrane en caoutchouc qui bouche le trou pour le pas-
sage des câbles et enfiler tous les câbles de connexion vers les diffé-
rents dispositifs en les laissant dépasser de 20÷30 cm. Voir le tableau
3 pour le type de câble et la figure 2 pour les connexions.
3.
Réunir avec un collier de serrage tous les câbles qui entrent dans l'opé-
rateur, placer le collier juste en dessous du trou d'entrée des câbles.
Sur la membrane de caoutchouc, découper un trou un peu plus étroit
que le diamètre des câbles regroupés et enfiler la membrane le long des
câbles jusqu'au collier; remettre ensuite la membrane dans le trou pour
le passage des câbles. Mettre un deuxième collier de serrage pour
regrouper les câbles juste au-dessus de la membrane.
4. Connecter le câble d'alimentation sur la borne prévue à cet effet com-
me l'indique la figure 15 puis avec un collier de serrage, bloquer le
câble au premier anneau serre-câbles.
5. Effectuer les connexions des autres câbles suivant le schéma de la
figure 17. Pour plus de commodité, les bornes peuvent être extraites.
6. Après avoir terminé les connexions, bloquer avec des colliers de ser-
rage les câbles regroupés au deuxième anneau serre-câbles, la partie
du câble d'antenne en excès doit être bloquée avec les autres câbles
à l'aide d'un autre collier comme l'indique la figure 16.
!
3.4) Installation des divers dispositifs
Installer les autres dispositifs prévus en suivant les instructions respectives. Vérifier dans le paragraphe “3.6 Description des connexions élec-
triques” et dans la figure 2 les dispositifs qui peuvent être connectés à ROBUS.
15
17
16
Pour connecter 2 moteurs sur des parties coulissantes opposées, voir le paragraphe “7.3.5 ROBUS en mode Slave”.
LUCYB
S.C.A.
MOFB MOSE
OPEN CLOSE

62
3.6) Description des connexions électriques
Ce paragraphe contient une brève description des connexions élec-
triques; d'autres informations se trouvent dans le paragraphe “7.3
Ajout ou enlèvement de dispositifs”.
FLASH: sortie pour clignotant type “LUCYB” ou similaires avec l'am-
poule 12 V maximum 21 W.
S.C.A.: sortie “Voyant portail ouvert”; il est possible de connecter
une ampoule de signalisation 24 V maximum 4 W. Elle peut être pro-
grammée aussi pour d'autres fonctions; voir paragraphe “7.2.3
Fonctions deuxième niveau”
BLUEBUS: sur cette borne, on peut connecter les dispositifs com-
patibles; ils sont tous connectés en parallèle avec seulement deux
conducteurs sur lesquels transitent aussi bien l'alimentation élec-
trique que les signaux de communication. D'autres informations sur
BlueBUS se trouvent dans le paragraphe “7.3.1 BlueBUS”.
STOP: entrée pour dispositifs qui bloquent ou éventuellement arrê-
tent la manœuvre en cours; en adoptant certaines solutions sur l'en-
trée, il est possible de connecter des contacts type “Normalement
Fermé”, “Normalement Ouvert” ou des dispositifs à résistance
constante. D'autres informations sur STOP se trouvent dans le para-
graphe “7.3.2 Entrée STOP”.
P. P.: entrée pour dispositifs qui commandent le mouvement en
mode Pas à Pas; on peut y connecter des contacts de type “Nor-
malement Ouvert”.
OPEN: entrée pour dispositifs qui commandent le mouvement d'ou-
verture uniquement; on peut y connecter des contacts de type “Nor-
malement Ouvert”.
CLOSE: entrée pour dispositifs qui commandent le mouvement de
fermeture uniquement; on peut y connecter des contacts de type
“Normalement Ouvert”.
ANTENNE: entrée pour la connexion de l'antenne pour récepteur
radio (l'antenne est incorporée sur LUCY B).
Avant de commencer la phase de contrôle et de mise en service de l'automatisme, il est conseillé de mettre le portail à mi-course environ
de manière qu'il puisse se déplacer aussi bien en ouverture qu'en fermeture.
4) Contrôles finaux et mise en service
4.1) Sélection de la direction
La direction de la manœuvre d'ouverture doit être choisie en fonction
de la position de l'opérateur par rapport au portail; si le portail doit
coulisser vers la gauche pour l'ouverture, il faut mettre le sélecteur
vers la gauche comme dans la figure 18, si le portail doit coulisser
vers la droite pour l'ouverture, il faut mettre le sélecteur vers la droi-
te comme dans la figure 19.
18
19
4.2) Branchement au secteur
Le branchement de ROBUS au secteur doit être effec-
tué par du personnel expert et qualifié en possession des
caractéristiques requises et dans le plein respect des lois,
normes et réglementations.
Dès que l'opérateur ROBUS est alimenté, il est conseillé de faire
quelques vérifications élémentaires:
1. Vérifier que la led BLUEBUS clignote régulièrement à la fréquen-
ce d'un clignotement à la seconde.
2. Vérifier que les led sur les photocellules clignotent elles aussi
(aussi bien sur TX que sur RX); la fréquence de clignotement n'est
pas significative, elle est liée à d'autres facteurs.
3. Vérifier que le clignotant connecté à la sortie FLASH et que le
voyant connecté sur la sortie S.C.A. sont éteints.
Si ce n'est pas le cas, il faut couper immédiatement l'alimentation de
la logique de commande et contrôler plus attentivement les
connexions électriques.
D'autres informations utiles pour la recherche et le diagnostic des
pannes se trouvent dans le chapitre “7.6 Résolution des problèmes”
!
4.3) Reconnaissance des dispositifs
Après le branchement au secteur il faut faire reconnaître par la logique de commande les dispositifs connectés aux entrées BLUEBUS et
STOP. Avant cette phase, les led L1 et L2 clignotent pour indiquer qu'il faut effectuer la reconnaissance des dispositifs.
La phase de reconnaissance des dispositifs connectés peut être refaite à tout moment même après l'installation, par exemple si l'on ajoute
un dispositif; pour effectuer la nouvelle reconnaissance, voir paragraphe “7.3.6 Reconnaissance d'autres dispositifs
1. Presser et maintenir enfoncées les touches [▲] et [Set]
2. Relâcher les touches quand les led L1 et L2 commencent à clignoter très rapidement
(au bout d'environ 3 s)
3. Attendre quelques secondes que la logique termine la reconnaissance des dispositifs
4. À la fin de la reconnaissance, la led STOP doit rester allumée, les led L1 et L2 s'éteindront (les led L3
et L4 commenceront éventuellement à clignoter)
20

63
F
4.4) Reconnaissance de la longueur du portail
Après la reconnaissance des dispositifs, les led L3 et L4 commenceront à clignoter; cela signifie qu'il faut faire reconnaître la longueur du
portail (distance entre le fin de course de fermeture et le fin de course d'ouverture); cette mesure est nécessaire pour le calcul des points de
ralentissement et le point d'ouverture partielle.
Si tout cela ne se vérifie pas, il faut couper immédiatement l'alimentation de la logique de commande et contrôler plus attentivement les
connexions électriques. D'autres informations utiles se trouvent dans le chapitre “7.6 Résolution des problèmes”
1. Presser et maintenir enfoncées les touches [▼] et [Set]
2. Relâcher les touches quand la manœuvre commence (au bout d'environ 3 s)
3. Vérifier que la manœuvre en cours est une ouverture, autrement presser la touche [Stop] et relire attentive-
ment le paragraphe “4.1 Sélection de la direction”; puis répéter à partir du point 1.
4. Attendre que la logique complète la manœuvre d'ouverture jusqu'à ce que le fin de course d'ouverture soit
atteint; la manœuvre de fermeture commence juste après.
5. Attendre que la logique complète la manœuvre de fermeture.
4.5) Vérification du mouvement du portail
Après la reconnaissance de la longueur du portail, il est conseillé d'effec-
tuer quelques manœuvres pour vérifier que le mouvement du portail est
correct.
1. Presser la touche [Open] pour commander une manœuvre d'ouver-
ture; vérifier que l'ouverture du portail s'effectue régulièrement sans
variation de vitesse; le portail ne doit ralentir que lorsqu'il se trouve
70÷50 cm avant le fin de course et il doit s'arrêter, suite à l'interven-
tion du fin de course, à 2÷3cm de la butée mécanique d'ouverture.
2. Presser la touche [Close] pour commander une manœuvre de
fermeture; vérifier que la fermeture du portail s'effectue régulière-
ment sans variation de vitesse; le portail ne doit ralentir que lors-
qu'il se trouve 70÷50 cm avant le fin de course et il doit s'arrêter,
suite à l'intervention du fin de course, à 2÷3cm de la butée méca-
nique de fermeture.
3. Durant la manœuvre, vérifier que le clignotant clignote à une fréquen-
ce régulière de 0,5 s. S'il est présent, contrôler également le clignote-
ment du voyant connecté à la borne SCA: clignotement lent en ouver-
ture, rapide en fermeture.
4. Effectuer différentes manœuvres d'ouverture et de fermeture pour
mettre en évidence les éventuels défauts de montage et de réglage ou
d'autres anomalies comme par exemple les points de plus grande fric-
tion.
5. Vérifier que les fixations de l'opérateur ROBUS, de la crémaillère et des
pattes de fin de course sont solides, stables et suffisamment résis-
tantes même en cas de brusques accélérations ou décélérations du
mouvement du portail
4.6) Fonctions préprogrammées
La logique de commande de ROBUS dispose de certaines fonctions
programmables; en usine ces fonctions sont réglées suivant une
configuration qui devrait satisfaire la plupart des automatisations;
quoiqu'il en soit, les fonctions peuvent être modifiées à tout moment
à l'aide d'une procédure de programmation particulière, voir pour
cela le paragraphe “7.2 Programmations”.
21
4.7) Récepteur radio
Pour la commande à distance de ROBUS, la logique de commande est munie d'un connecteur SM pour récepteurs radio type SMXI ou
SMXIS en option. Pour tout renseignement supplémentaire, consulter le manuel d'instructions du récepteur radio. Pour embrocher le récep-
teur radio effectuer l'opération indiquée dans la figure 22.
Dans le tableau 6, on trouve décrite l'association entre la sortie du récepteur radio et la commande que ROBUS exécutera:
22
Sortie N°1 Commande “PP” (Pas à Pas)
Sortie N°2 Commande “Ouverture partielle”
Sortie N°3 Commande“Ouverture”
Sortie N°4 Commande “Fermeture”
Tableau 6: commandes avec émetteur
Il s'agit des phases les plus importantes dans la réalisation de l'au-
tomatisation afin de garantir la sécurité maximum. L'essai peut être
utilisé également comme vérification périodique des dispositifs qui
composent l'automatisme.
L'essai de toute l'installation doit être effectué par du per-
sonnel qualifié et expérimenté qui devra se charger d'établir
les essais prévus en fonction des risques présents et de véri-
fier le respect de ce qui est prévu par les lois, les normes et
réglementations et en particulier, toutes les conditions de la
norme EN 12445 qui détermine les méthodes d'essai pour la
vérification des automatismes pour portails.
!
5) Essai et mise en service

64
5.1) Essai
Chaque élément de l'automatisme comme par exemple les bords sen-
sibles, les photocellules, l'arrêt d'urgence, etc. demande une phase spé-
cifique d'essai; pour ces dispositifs, il faudra effectuer les procédures figu-
rant dans les manuels d'instructions respectifs.
Pour l'essai de ROBUS effectuer les opérations suivantes:
1. Vérifier que tout ce qui est prévu dans le présent manuel est rigoureu-
sement respecté et en particulier dans le chapitre “1 Avertissements”;
2. Débrayer l'opérateur suivant les indications du paragraphe “Débraya-
ge et manœuvre manuelle” dans le chapitre “Instructions et recom-
mandations destinées à l'utilisateur de l'opérateur ROBUS”;
3. Vérifier qu'il est possible de manœuvrer manuellement le portail en
ouverture et en fermeture avec une force ne dépassant pas 390 N
(environ 40 kg);
4. Bloquer l'opérateur.
5. En utilisant les dispositifs de commande ou d'arrêt prévus (sélecteur
à clé, boutons de commande ou émetteurs radio), effectuer des
essais d'ouverture, de fermeture et d'arrêt du portail et vérifier que le
comportement du portail correspond à ce qui est prévu.
6. Vérifier un par un le fonctionnement correct de tous les dispositifs de
sécurité présents dans l'installation (photocellules, barres palpeuses,
arrêt d'urgence, etc.); et vérifier que le comportement du portail cor-
respond à ce qui est prévu. À chaque fois qu'un dispositif intervient, la
led “BlueBUS” sur la logique de commande doit effectuer 2 clignote-
ments plus rapides qui confirment qu'elle reconnaît l'événement.
7. Si l'on n'a pas remédié aux situations de risque liées au mouvement
du portail à travers la limitation de la force d'impact, il faut effectuer la
mesure de la force d'impact suivant les prescriptions de la norme EN
12445. Si le réglage de la “Vitesse” et le contrôle de la “Force moteur”
sont utilisés pour aider le système à réduire la force d'impact, essayer
et trouver les réglages qui donnent les meilleurs résultats.
5.2) Mise en service
La mise en service ne peut être faite que si toutes les phases d'essai de
ROBUS et des autres dispositifs ont été exécutées avec résultat positif.
La mise en service partielle ou dans des situations “provisoires” n'est pas
autorisée.
1. Réaliser et conserver au moins 10 ans le fascicule technique de l'au-
tomatisation qui devra comprendre au moins: dessin d'ensemble de
l'automatisation, schéma des connexions électriques, analyse des
risques et solutions adoptées, déclaration de conformité du fabricant
de tous les dispositifs utilisés (pour ROBUS, utiliser la Déclaration CE
de conformité ci-jointe), exemplaire du mode d'emploi et du plan de
maintenance de l'automatisme.
2. Appliquer sur le portail une plaquette contenant au moins les données
suivantes: type d'automatisme, nom et adresse du constructeur (res-
ponsable de la “mise en service”), numéro de matricule, année de
construction et marque “CE”.
3. Fixer de manière permanente à proximité du portail une étiquette
ou une plaque indiquant les opérations à effectuer pour le
débrayage et la manœuvre manuelle.
4. Remplir et remettre au propriétaire la déclaration de conformité de
l'automatisme.
5. Réaliser et remettre au propriétaire de l'automatisme le manuel “Ins-
tructions et avertissements pour l'utilisation de l'automatisme”.
6. Réaliser et remettre au propriétaire le plan de maintenance de
l'automatisme (qui doit regrouper toutes les prescriptions pour la
maintenance de chaque dispositif).
7. Avant de mettre en service l'automatisme, informer le propriétai-
re, de manière adéquate et par écrit (par exemple dans le manuel
d'instructions et d'avertissements pour l'utilisation de l'automatis-
me), sur les risques encore présents.
Ce chapitre contient les informations pour la réalisation du plan de maintenance et la mise au rebut de ROBUS
6) Maintenance et mise au rebut
6.1) Maintenance
Pour maintenir le niveau de sécurité et pour garantir la durée maximum
de tout l'automatisme, il faut effectuer une maintenance régulière; dans
ce but, ROBUS dispose d'un compteur de manœuvres et d'un système
de signalisation de maintenance nécessaire; voir paragraphe “7.4.3 Avis
de maintenance”.
La maintenance doit être effectuée dans le plein respect
des consignes de sécurité du présent manuel et suivant les
prescriptions des lois et normes en vigueur.
Si d'autres dispositifs sont présents, suivre ce qui est prévu dans le plan
de maintenance respectif.
1. Pour ROBUS il faut effectuer une maintenance programmée au maxi-
mum dans les 6 mois ou quand 20 000 manœuvres ont été effec-
tuées depuis la dernière intervention de maintenance:
2. Couper toutes les sources d'alimentation électrique de l'automatisme,
y compris les éventuelles batteries tampon.
3. Vérifier l'état de détérioration de tous les matériaux qui composent
l'automatisme avec une attention particulière pour les phénomènes
d'érosion ou d'oxydation des parties structurelles; remplacer les par-
ties qui ne donnent pas de garanties suffisantes.
4. Vérifier l'état d'usure des parties en mouvement: pignon, crémaillère
et toutes les parties mobiles du portail, remplacer les parties usées.
5. Reconnecter les sources d'alimentation électrique et effectuer tous les
essais et les contrôles prévus dans le paragraphe “5.1 Essai”.
!
6.2) Mise au rebut
ROBUS est constitué de différents types de matériaux dont certains
peuvent être recyclés (acier, aluminium, plastique, câbles électriques),
d'autres devront être mis au rebut (batteries et cartes électroniques).
certains composants électroniques et les batteries
pourraient contenir des substances polluantes, ne pas les
abandonner dans la nature. Informez-vous sur les systè-
mes de recyclage ou de mise au rebut en respectant les
normes locales en vigueur.
1. Déconnecter l'alimentation électrique de l'automatisme et l'éventuelle
batterie tampon.
2. Démonter tous les dispositifs et accessoires, suivant la procédure
inverse à celle qui est décrite dans le chapitre 3 “Installation”.
3. Séparer le plus possible les parties qui peuvent ou doivent être recy-
clées ou éliminées de manière différente, par exemple séparer les par-
ties métalliques des parties en plastique, les cartes électroniques, les
batteries, etc.
4. Trier et confier les différents matériaux ainsi séparés et recyclables à
des sociétés spécialisées dans la récupération et le recyclage suivant
les réglementations locales.
!

65
F
Ce chapitre explique les possibilités de programmation et de personnalisation, ainsi que le diagnostic et la recherche des pannes sur ROBUS
7) Approfondissements
7.1) Touches de programmation
Sur la logique de commande de ROBUS se trouvent 3 touches qui peuvent être utilisées aussi
bien pour la commande de la logique durant les essais que pour les programmations:
23
7.2) Programmation
La logique de commande de ROBUS possède quelques fonctions pro-
grammables; le réglage des fonctions s'effectue à travers 3 touches pré-
sentes sur la logique: [▲] [Set] [▼] et sont visualisées à l'aide de 8 led:
L1….L8.
Les fonctions programmables disponibles sur ROBUS sont réparties en
deux niveaux:
Premier niveau: fonctions réglables en mode ON-OFF (actif ou non
actif); dans ce cas, chaque led L1….L8 indique une fonction, si elle est
allumée la fonction est active, si elle est éteinte la fonction n'est pas acti-
ve; voir tableau 7.
Deuxième niveau: paramètres réglables sur une échelle de valeurs
(valeurs d'1 à 8); dans ce cas, chaque led L1….L8 indique la valeur
réglée parmi les 8 possibles; voir tableau 9.
Led Fonction Description
L1 Fermeture automatique Cette fonction permet une fermeture automatique du portail après le temps de pause programmé; le Temps de
pause est réglé en usine à 30 secondes mais peut être modifié à 5, 15, 30, 45, 60, 80, 120 et 180 secondes.
Si la fonction n'est pas active, le fonctionnement est “semi-automatique”.
L2 Refermeture immédiate
Cette fonction permet de garder le portail ouvert uniquement le temps nécessaire au transit, en effet après passage
devant passage l'intervention de “Photo” provoque toujours une refermeture automatique avec un temps de pause de 5 s
photocellule
(indépendamment de la valeur programmée); le comportement varie suivant si la “Fermeture
Automatique” est active ou pas.
Si la “Fermeture automatique” n'est pas active: le portail atteint toujours la position d'ouverture totale
(même si la libération de la photocellule a lieu avant). La libération de la photocellule provoque une
manœuvre de fermeture automatique au bout de 5 s.
Avec la “fermeture automatique” active: la manœuvre d'ouverture s'arrête juste après que les
photocellules aient été libérées et 5 s plus tard la manœuvre de fermeture automatique commence.
La fonction “Refermeture immédiate après passage devant photocellule” est toujours désactivée dans les
manœuvres interrompues avec une commande de Stop. Si la fonction “Refermeture immédiate après
passage devant photocellule” n'est pas active, le temps de pause sera celui qui est programmé ou bien il
n'y aura pas de refermeture automatique si la fonction n'est pas active.
L3 Ferme toujours La fonction “Ferme toujours” intervient, en provoquant une fermeture, quand au retour de l'alimentation la
logique détecte le portail ouvert. Pour des questions de sécurité, la manœuvre est précédée par 5 s de
préclignotement. Si la fonction n'est pas active au retour de l'alimentation, le portail restera arrêté.
L4 Stand-By Cette fonction permet de réduire au maximum la consommation d'énergie, elle est utile en particulier dans
le fonctionnement avec batterie tampon. Si cette fonction est active, 1 minute après la fin de la manœuvre,
la logique éteint BLUEBUS (et donc les dispositifs) et toutes les led sauf la led BLUEBUS qui clignotera
plus lentement. Quand une commande arrive, la logique rétablit le plein fonctionnement.
Si la fonction n'est pas active, il n'y aura pas de réduction des consommations.
L5 Démarrage Avec l'activation de cette fonction, l'accélération progressive au début de chaque manœuvre est
désactivée; cela permet d'avoir la force de démarrage maximum et c'est utile en cas de frictions statiques
élevées, par exemple en cas de neige ou de givre qui bloquent le portail. Si la fonction n'est pas active, la
manœuvre commence avec une accélération progressive.
L6 Préclignotement Avec la fonction de préclignotement, une pause de 3 s est ajoutée entre l'allumage du clignotant et le
début de la manœuvre pour avertir l'utilisateur de la situation de danger. Si la fonction n'est pas active,
l'allumage du clignotant coïncide avec le début de la manœuvre.
L7 “Fermeture” devient En activant cette fonction, toutes les commandes “fermeture” (entrée “CLOSE” ou commande radio “fermeture”)
“Ouverture partielle” activent une manœuvre d'ouverture partielle (voir led L6 sur tableau 9).
L8 Mode “Slave” (esclave) En activant cette fonction ROBUS devient “Slave” (esclave): il est possible, ainsi, de synchroniser le fonctionnement
de 2 moteurs sur des parties coulissantes opposées dans lesquelles un moteur fonctionne comme Master
(maître) et un comme Slave (esclave); pour plus de détails, voir le paragraphe “7.3.5 ROBUS en mode “Slave”.
Durant le fonctionnement normal de ROBUS les led L1….L8 sont allumées ou éteintes suivant l'état de la fonction à laquelle elles
correspondent, par exemple L1 est allumée si la “Fermeture automatique” est active.
Tableau 7: liste des fonctions programmables: premier niveau
7.2.1) Fonctions premier niveau (fonctions ON-OFF)
Open La touche “OPEN” permet de commander l'ouverture du portail ou de
▲ déplacer vers le haut le point de programmation.
Stop La touche “STOP” permet d'arrêter la manœuvre et si elle
Set est pressée plus de 5 secondes, elle permet d'entrer en programmation.
Close La touche “CLOSE” permet de commander la fermeture du portail ou
▼ de déplacer vers le bas le point de programmation.

66
Temps de
pause
Fonction P.P.
Vitesse
moteur
Sortie S.C.A
Force moteur
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
5 secondes
15 secondes
30 secondes
45 secondes
60 secondes
80 secondes
120 secondes
180 secondes
Ouverture - stop - fermeture- stop
Ouverture - stop - fermeture- ouverture
Ouverture - fermeture- ouverture - fermeture
Fonctionnement collectif
Fonctionnement collectif 2 (plus de 2 s provoque un stop)
Pas à Pas 2 (moins de 2 s provoque une ouverture partielle)
Commande “homme mort”
Ouverture en “semi-automatique”, fermeture à
“homme mort”
Très lente
Lente
Moyenne
Rapide
Très rapide
Super rapide
Ouverture “rapide”; fermeture “lente”
Ouverture “très rapide”, Fermeture “rapide”
Fonction “voyant portail ouvert”
Active si le portail est fermé
Active si le portail est ouvert
Active avec sortie radio N°2
Active avec sortie radio N°3
Active avec sortie radio N°4
Voyant maintenance
Serrure électrique
Portail “très léger”
Portail “très léger”
Portail léger
Portail moyen
Portail moyen-lourd
Portail lourd
Portail très lourd
Portail très lourd
7.2.2) Programmation du premier niveau (fonctions ON-OFF)
En usine, les fonctions du premier niveau sont toutes mises sur “OFF” mais on peut les modifier à tout moment comme l'indique le tableau
8. Faire attention dans l'exécution de la procédure car il y a un temps maximum de 10 s entre la pression d'une touche et l'autre, autrement
la procédure se termine automatiquement en mémorisant les modifications faites jusqu'à ce moment-là.
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s
3s
2. Relâcher la touche [Set] quand la led L1 commence à clignoter
L1
3. Presser les touches [▲] ou [▼] pour déplacer la led clignotante sur la led qui correspond à la fonction
à modifier ou
4. Presser la touche [Set] pour changer l'état de la fonction
(clignotement bref = OFF; clignotement long = ON)
5. Attendre 10 s pour sortir de la programmation pour temps maximum écoulé.
10s
Note: les points 3 et 4 peuvent être répétés au cours de la même phase de programmation pour mettre d'autres fonctions en mode ON ou OFF.
Tableau 8: pour changer les fonctions ON-OFF Exemple
SET
SET
SET
7.2.3 Fonctions deuxième niveau (paramètres réglables)
Tableau 9: liste des fonctions programmables: deuxième niveau
Led d'entrée Paramètre Led (niveau) valeur Description
Règle le temps de pause, c'est-à-
dire le temps avant la refermeture
automatique. La fonction n'a d'effet
que si la fermeture automatique est
active
Règle la séquence de commandes
associées à l'entrée P.P. ou bien à
la première commande radio
Règle la vitesse du moteur durant
la course normale.
Règle la fonction associée à la sor-
tie S.C.A. (quelle que soit la fonc-
tion associée, la sortie, quand elle
est active, fournit une tension de
24 V -30 +50% avec une puissan-
ce maximum de 4 W)
Règle le système de contrôle de la
force du moteur pour l'adapter au
poids du portail. Le système de
contrôle de la force mesure aussi la
température ambiante en augmen-
tant automatiquement la force en
cas de températures particulière-
ment basses.
L1
L2
L3
L4
L5

67
F
Note: “ ” représente le réglage fait en usine
Tous les paramètres peuvent être réglés suivant les préférences sans aucune contre-indication; seul le réglage “force moteur” pourrait
demander une attention particulière:
• Il est déconseillé d'utiliser des valeurs de force élevées pour compenser le fait que le portail a des points de friction anormaux. Une force
excessive peut compromettre le fonctionnement du système de sécurité ou endommager le portail.
• Si le contrôle de la “force moteur” est utilisé comme soutien du système pour la réduction de la force d'impact, après chaque réglage,
répéter la mesure de la force, comme le prévoit la norme EN 12445.
• L'usure et les conditions atmosphériques peuvent influencer le mouvement du portail, périodiquement il faut recontrôler le réglage de la
force..
Ouverture
partielle
Avis de
maintenance
Liste
anomalies
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
0,5 m
1 m
1,5 m
2 m
2,5 m
3 m
3,4 m
4 m
Automatique, (suivant la charge de travail et
les conditions des manœuvres)
1000
2000
4000
7000
10000
15000
20000
Résultat 1
re
manœuvre
Résultat 2
e
manœuvre
Résultat 3
e
manœuvre
Résultat 4
e
manœuvre
Résultat 5
e
manœuvre
Résultat 6
e
manœuvre
Résultat 7
e
manœuvre
Résultat 8
e
manœuvre
Led d'entrée Paramètre Led (niveau) valeur Description
Règle la mesure de l'ouverture partielle.
L'ouverture partielle peut se commander
uniquement avec la 2e commande radio ou
bien avec “FERMETURE”, si la fonction est
présente, “Fermeture” devient alors “Ouver-
ture partielle”
Règle le nombre de manœuvres après
lequel il faut signaler la demande de main-
tenance de l'automatisme (voir paragraphe
“7.4.3 Avis de Maintenance”).
(la plus récente) Permet de vérifier le type
d'anomalie qui s'est vérifiée dans les 8 der-
nières manœuvres (voir paragraphe “7.6.1
Historique des anomalies”).
L6
L7
L8
7.2.4) Programmation deuxième niveau (paramètres réglables)
En usine, les paramètres réglables sont réglés comme l'illustre le tableau 9 avec: “ ” mais ils peuvent être modifiés à tout moment com-
me l'indique le tableau 10. Faire attention dans l'exécution de la procédure car il y a un temps maximum de 10 s entre la pression d'une
touche et l'autre, autrement la procédure se termine automatiquement en mémorisant les modifications faites jusqu'à ce moment-là.
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s
pendant 3s
2. Relâcher la touche [Set] quand la led L1 commence à clignoter
L1
3. Presser les touches [▲] ou [▼] pour déplacer la led clignotante sur la “led d'entrée” qui correspond
au paramètre à modifier ou
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5 et 6
5. Attendre environ 3 s puis la led qui correspond au niveau actuel du paramètre à modifier s'allumera
6. Presser les touches [▲] ou [▼] pour déplacer la led qui correspond à la valeur du paramètre
ou
7. Relâcher la touche [Set]
8. Attendre 10 s pour sortir de la programmation pour temps maximum écoulé
10s
Note: les points de 3 à 7 peuvent être répétés au cours de la même phase de programmation pour régler plusieurs paramètres.
Tableau 10: pour changer les paramètres réglables Exemple
SET
SET
SET
SET

68
7.2.6) Exemple de programmation deuxième niveau (paramètres réglables)
Comme exemple nous indiquons les diverses opérations à effectuer pour modifier le réglage des paramètres effectué en usine en augmentant le
“Temps de pause” à 60 s (entrée sur L1 et niveau sur L5) et en réduisant la “Force moteur” pour portails légers (entrée sur L5 et niveau sur L2).
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s
pendant 3s
2. Relâcher la touche [Set] quand la led L1 commence à clignoter
L1
3. Presser et maintenir enfoncée la touche [Set]; la pression sur la touche [Set] doit être maintenue
pendant toute la durée des phases 4 et 5
4. Attendre environ 3 s jusqu'à l'allumage de la led L3 qui correspond au niveau actuel
du “Temps de pause” L3 3s
5. Presser 2 fois la touche [▼] pour déplacer la led allumée sur L5 qui représente la nouvelle valeur
du “Temps de pause” L5
6. Relâcher la touche [Set]
7. Presser 4 fois la touche [▼] pour déplacer la led clignotante sur la led L5
L5
8. Presser et maintenir enfoncée la touche [Set]; la pression sur la touche [Set] doit être maintenue
pendant toute la durée des phases 9 et 10
9. Attendre environ 3 s jusqu'à l'allumage de la led L5 qui correspond au niveau actuel
de la “Force moteur” 3s L5
10. Presser 3 fois la touche [▲] pour déplacer la led allumée sur L2 qui correspond à
la nouvelle valeur de la “Force moteur” L2
11. Relâcher la touche [Set]
12. Attendre 10 s pour sortir de la programmation pour temps maximum écoulé.
10s
Tableau 12: exemple de programmation deuxième niveau Exemple
SET
SET
SET
SET
SET
SET
7.3) Ajout ou enlèvement de dispositifs
À un automatisme avec ROBUS on peut ajouter ou enlever des dis-
positifs à n'importe quel moment. En particulier, à “BLUEBUS” et à
l'entrée “STOP” on peut connecter différents types de dispositifs
comme l'indiquent les paragraphes suivants.
Après avoir ajouté ou enlevé des dispositifs, il faut procé-
der de nouveau à la reconnaissance des dispositifs sui-
vant les indications du paragraphe “7.3.6 Reconnaissance
d'autres dispositifs”.
7.3.1) BLUEBUS
BlueBUS est une technique qui permet d'effectuer les connexions des
dispositifs compatibles avec seulement deux conducteurs sur lesquels
transitent aussi bien l'alimentation électrique que les signaux de commu-
nication. Tous les dispositifs sont connectés en parallèle sur les 2 mêmes
conducteurs de BlueBUS sans devoir respecter une polarité quelconque;
chaque dispositif est reconnu individuellement car au cours de l'installa-
tion le système lui attribue une adresse univoque. À BlueBUS, on peut
connecter par exemple: des photocellules, des dispositifs de sécurité,
des boutons de commande, des voyants de signalisation, etc. La logique
de commande de ROBUS reconnaît un par un tous les dispositifs
connectés à travers une procédure de reconnaissance ad hoc et est en
mesure de détecter de manière extrêmement sûre toutes les éventuelles
anomalies. Pour cette raison, à chaque fois qu'on ajoute ou qu'on enlè-
ve un dispositif connecté à BlueBUS il faudra effectuer dans la logique la
procédure de reconnaissance décrite dans le paragraphe “7.3.6 Recon-
naissance d'autres dispositifs”.
7.2.5) Exemple de programmation premier niveau (fonctions ON-OFF)
Comme exemple nous indiquons les diverses opérations à effectuer pour modifier le réglage des fonctions fait en usine pour activer les fonc-
tions de “Fermeture Automatique” (L1) et “Ferme toujours” (L3).).
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s
pendant 3s
2. Relâcher la touche [Set] quand la led L1 commence à clignoter
L1
3. Presser une fois la touche [Set] pour changer l'état de la fonction associée à L1 (Fermeture
Automatique), maintenant la led L1 clignote avec clignotement long L1
4. Presser 2 fois la touche [▼] pour déplacer la led clignotante sur la led L3
L3
5. Presser une fois la touche [Set] pour changer l'état de la fonction associée à L3 (Ferme toujours),
maintenant la led L3 clignote avec clignotement long L3
6. Attendre 10 s pour sortir de la programmation pour temps maximum écoulé
10s
À la fin de ces opérations les led L1 et L3 doivent rester allumées pour indiquer que les fonctions de “Fermeture Automatique” et “Ferme
toujours” sont actives.
Tableau 11: exemple de programmation premier niveau Exemple
SET
SET
SET
SET

69
F
7.3.2) Entrée STOP
STOP est l'entrée qui provoque l'arrêt immédiat de la manœuvre sui-
vi d'une brève inversion. On peut connecter à cette entrée des dis-
positifs avec sortie à contact normalement ouvert “NO”, normale-
ment fermé “NF” ou des dispositifs avec sortie à résistance constan-
te 8,2 kΩ, par exemple des bords sensibles.
Comme pour BlueBUS, la logique reconnaît le type de dispositif
connecté à l'entrée STOP durant la phase de reconnaissance (voir
paragraphe “7.3.6 Reconnaissance d'autres dispositifs”); ensuite on
a un STOP quand une variation quelconque se vérifie par rapport à
l'état reconnu.
En adoptant certaines solutions on peut connecter à l'entrée STOP
plus d'un dispositif, même de type différent:
• Plusieurs dispositifs NO peuvent être connectés en parallèle entre
eux sans aucune limite de quantité.
• Plusieurs dispositifs NF peuvent être connectés en parallèle entre
eux sans aucune limite de quantité.
• Deux dispositifs avec sortie à résistance constante 8,2 kΩ peu-
vent être connectés en parallèle; s'il y a plus de 2 dispositifs, tous
doivent être connectés en “cascade” avec une seule résistance
terminale de 8,2 kΩ.
• Il est possible de combiner NO et NF en mettant les deux contacts
en parallèle, en prenant la précaution de mettre en série au
contact NF une résistance de 8,2 kΩ (cela donne aussi la possi-
bilité de combiner 3 dispositifs: NO, NF et 8,2 kΩ).
si l'entrée STOP est utilisée pour connecter des dispo-
sitifs ayant des fonctions de sécurité, seuls les dispositifs
avec sortie à résistance constante 8,2 kΩ garantissent la
catégorie 3 de sécurité aux pannes selon la norme EN
954-1.
!
PHOTO
Photocellule extérieure h = 50
avec intervention en fermeture
PHOTO II
Photocellule extérieure h = 100
avec intervention en fermeture
PHOTO 1
Photocellule extérieure h = 50
avec intervention en fermeture
PHOTO 1 II
Photocellule extérieure h = 100
avec intervention en fermeture
PHOTO 2
Photocellule extérieure
avec intervention en fermeture
PHOTO 2 II
Photocellule intérieure
avec intervention en fermeture
PHOTO 3
Photocellule unique qui couvre
tout l'automatisme
L'installation de PHOTO 3 avec PHOTO II demande que la position
des éléments qui composent la photocellule (TX-RX) respecte la recom-
mandation donnée dans le manuel d'instructions des photocellules.
!
7.3.3) Photocellules
Le système “BlueBUS” permet, à travers l'adressage avec les cava-
liers prévus à cet effet, la reconnaissance des photocellules de la
part de la logique et d'attribuer la fonction de détection correcte.
L'opération d'adressage doit être faite aussi bien sur TX que sur RX
(en plaçant les cavaliers de la même manière) en vérifiant qu'il n'y a
pas d'autres paires de photocellules ayant la même adresse.
Dans un automatisme pour portails coulissants équipé de l'opéra-
teur ROBUS il est possible d'installer les photocellules suivant les
indications de la figure 24.
Après l'installation ou l'enlèvement de photocellules, il faudra effec-
tuer dans la logique la phase de reconnaissance comme le décrit le
paragraphe “7.3.6 Reconnaissance d'autres dispositifs”.
7.3.4) Photodétecteur FT210B
Le photodétecteur FT210B réunit dans un seul dispositif un système
de limitation de la force (type C suivant la norme EN12453) et un
détecteur de présence qui détecte les obstacles présents sur l'axe
optique entre l'émetteur TX et le récepteur RX (type D suivant la nor-
me EN12453). Dans le photodétecteur FT210B, les signaux de l'état
du bord sensible sont envoyés à travers le rayon de la photocellule
en intégrant les 2 systèmes dans un seul dispositif. La partie émet-
trice située sur la partie mobile est alimentée par des batteries, ce
qui permet d'éliminer les systèmes de connexion, peu esthétiques;
les circuits spéciaux réduisent la consommation de la batterie pour
garantir jusqu'à 15 ans de durée (voir les détails sur la durée estimée
dans les instructions du produit).
Un seul dispositif FT210B associé à un bord sensible (TCB65 par
exemple) permet d'atteindre le niveau de sécurité du “bord primaire”
requis par la norme EN12453 pour n'importe quel “type d'utilisation”
et “type d'activation”. Le photodétecteur FT210B associé aux bords
sensibles “à variation de résistance” (8,2 k_), maintient la sécurité en
cas de défaut unique (catégorie 3 suivant la norme EN 954-1). Il dis-
pose d'un circuit anticollision qui évite les interférences avec d'autres
détecteurs même s'ils ne sont pas synchronisés et permet d'ajouter
d'autres photocellules; par exemple, en cas de passage de véhi-
cules lourds où l'on place normalement une deuxième photocellule
à 1 m du sol.
Pour tout renseignement supplémentaire sur les modalités de
connexion et d'adressage, voir le manuel d'instructions de FT210B.
24
Tableau 13: adresses des photocellules
Photocellule Cavaliers Photocellule Cavaliers

70
7.3.5) ROBUS en mode “Slave”
Si on le programme et si on le connecte de manière spécifique,
ROBUS peut fonctionner en mode “Slave” (esclave); ce mode de
fonctionnement est utilisé s'il faut automatiser 2 parties coulissantes
opposées et si l'on souhaite que leur mouvement s'effectue de
manière synchronisée. Dans ce mode un ROBUS fonctionne com-
me Master (maître) c'est-à-dire qu'il commande les manœuvres, tan-
dis que le deuxième ROBUS fonctionne comme Slave, c'est-à-dire
qu'il exécute les commandes envoyées par le Master (par défaut,
tous les ROBUS sortent de l'usine en mode Master).
Pour configurer ROBUS comme Slave il faut activer la fonction de
premier niveau “Mode Slave” (voir tableau 7).
La connexion entre le ROBUS Master et le ROBUS Slave s'effectue
par BlueBUS.
dans ce cas il faut respecter la polarité dans la
connexion entre les deux ROBUS comme l'illustre la figu-
re 26 (les autres dispositifs continuent à ne pas avoir de
polarité).
Pour installer 2 ROBUS en mode Master et Slave effectuer les opé-
rations suivantes:
• Effectuer l'installation des 2 moteurs comme l'illustre la figure 25.
On peut choisir l'un ou l'autre moteur comme Master et comme
Slave; dans le choix, il faut tenir compte de la commodité des
connexions et du fait que la commande Pas à pas sur le Slave per-
met l'ouverture totale uniquement de la partie commandée par le
moteur Slave.
• Connecter les 2 moteurs comme dans la figure 26.
• Sélectionner le sens de manœuvre d'ouverture des 2 moteurs
comme l'indique la figure 25 (voir aussi le paragraphe “4.1 Sélec-
tion de la direction”).
• Alimenter les 2 moteurs.
• Dans le ROBUS Slave programmer la fonction “Mode Slave” (voir
tableau 7).
• Effectuer la reconnaissance des dispositifs sur le ROBUS Slave
(voir paragraphe “4.3 Reconnaissance des dispositifs”).
• Effectuer la reconnaissance des dispositifs sur le ROBUS Master
(voir paragraphe “4.3 Reconnaissance des dispositifs).
• Effectuer la reconnaissance de la longueur des parties du portail
sur le ROBUS Master (voir paragraphe “4.4 Reconnaissance de la
longueur du portail”).
!
25
26
Lors de la connexion de 2 ROBUS en mode Master-Slave faire attention aux points suivants:
• Tous les dispositifs doivent être connectés sur le ROBUS Master (comme dans la fig.26) y compris le récepteur radio.
• Si l'on utilise des batteries tampon, chaque moteur doit avoir la sienne.
• Toutes les programmations sur le ROBUS Slave sont ignorées (celles du ROBUS Master prédominent) sauf celles qui figurent dans le
tableau 14.
LUCYB
S.C.A.
MOFB
MOSE
OPEN
CLOSE
LUCYB
S.C.A.
STOP
PP

71
F
7.4.1) Fonction “Ouvre toujours”
La fonction “Ouvre toujours” est une propriété de la logique de com-
mande qui permet de commander toujours une manœuvre d'ouver-
ture quand la commande de “Pas à Pas” a une durée supérieure à
2 secondes; c'est utile par exemple pour connecter à la borne P.P.
le contact d'une horloge de programmation pour maintenir le portail
ouvert pendant une certaine plage horaire. Cette propriété est
valable quelle que soit la programmation de l'entrée P.P. à l'exclusion
de la programmation comme “Fermeture”, voir paramètre “Fonction
P.P.” dans le tableau 9.
7.4.2) Fonction “Manœuvre dans tous les cas”
Si un dispositif de sécurité quelconque devait mal fonctionner ou
tomber en panne, il est possible dans tous les cas de commander
et de manœuvrer le portail en mode “Commande homme mort”.
Pour tout détail, voir le paragraphe “Commande avec sécurités hors
d'usage” présent dans les “Instructions et recommandations desti-
nées à l'utilisateur de l'opérateur ROBUS” ci-jointes.
7.4.3) Avis de maintenance
ROBUS permet d'aviser l'utilisateur quand il faut procéder à la main-
tenance de l'automatisme. Le nombre de manœuvres après lequel
s'effectue la signalisation est sélectionnable parmi 8 niveaux, avec le
paramètre réglable “Avis de maintenance” (voir tableau 9).
Le niveau 1 de réglage est “automatique” et tient compte de l'inten-
sité et des conditions des manœuvres, c'est-à-dire de l'effort et de
la durée de la manœuvre, tandis que les autres réglages sont fixés
en fonction du nombre de manœuvres.
La signalisation de demande de maintenance s'effectue à travers le cli-
gnotant Flash ou bien sur le voyant connecté à la sortie S.C.A. quand
il est programmé comme “Voyant Maintenance” (voir tableau 9).
Suivant le nombre de manœuvres effectuées par rapport à la limite
programmée, le clignotant Flash et le voyant de maintenance don-
nent les signalisations indiquées dans le tableau 16.
7.4) Fonctions particulières
Tableau 14: programmations sur ROBUS Slave indépendantes de ROBUS Master
Fonctions premier niveau (fonctions ON-OFF) Fonctions deuxième niveau (paramètres réglables)
Stand-by Vitesse moteur
Démarrage Sortie S.C.A.
Mode Slave Force moteur
Liste Erreurs
Sur le Slave, il est possible de connecter:
•
un clignotant spécifique (Flash)
•
un voyant portail ouvert (S.C.A) spécifique
•
un bord sensible (Stop) spécifique
•
un dispositif de commande (P.P.) spécifique qui commande l'ouverture totale seulement de la partie Slave.
•
Sur le Slave les entrées Open et Close ne sont pas utilisées.
7.3.6) Reconnaissance d'autres dispositifs
Normalement la procédure de reconnaissance des dispositifs connectés à BlueBUS et à l'entrée STOP est effectuée durant la phase d'installation;
toutefois si des dispositifs sont ajoutés ou enlevés, il est possible de refaire la reconnaissance en procédant de la manière suivante:
1. Presser et maintenir enfoncées les touches [▲] et [Set]
2. Relâcher les touches quand les led L1 et L2 commencent à clignoter très rapidement
(au bout d'environ 3 s) L1 L2
3. Attendre quelques secondes que la logique termine la reconnaissance des dispositifs
4. À la fin de la reconnaissance, les led L1 et L2 arrêteront de clignoter, la led STOP doit rester allumée,
tandis que les led L1…L8 s'allumeront suivant l'état des fonctions ON-OFF auxquelles elles correspondent. L1 L2
Après avoir ajouté ou enlevé des dispositifs, il faut effectuer de nouveau l'essai de l'automatisme suivant les indications
du paragraphe “5.1 Essai”.
!
Tableau 15: pour la reconnaissance d'autres dispositifs Exemple
SET
SET
Nombre de manœuvres Signalisation sur Flash Signalisation sur voyant maintenance
Inférieur à 80% de la limite
Entre 81 et 100% de la limite
Au-delà de 100% de la limite
Normal (0,5 s allumé, 0,5 s éteint)
Au début de la manœuvre, il reste allumé
pendant 2 s puis continue normalement
Au début et à la fin de la manœuvre, il reste
allumé pendant 2 s puis continue normalement
Allumé pendant 2 s au début de l'ouverture
Clignote pendant toute la manœuvre
Clignote toujours.
Tableau 16: avis de maintenance avec Flash et voyant de maintenance

72
Vérification du nombre de manœuvres effectuées
Avec la fonction d'“Avis de maintenance” il est possible de vérifier le nombre de manœuvres effectuées en pourcentage sur la limite fixée.
Pour la vérification, procéder suivant la description du tableau 17.
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s
pendant 3s
2. Relâcher la touche [Set] quand la led L1 commence à clignoter
L1
3. Presser les touches [▲] ou [▼] pour déplacer la led clignotante sur L7, c'est-à-dire la “led d'entrée”
pour le paramètre “Avis de maintenance” ou L7
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5, 6 et 7
5. Attendre environ 3 s puis la led représentant le niveau actuel du paramètre “Avis de maintenance”
s'allumera 3s
6. Presser puis relâcher immédiatement les touches [▲] et [▼].
et
7. La led correspondant au niveau sélectionné émettra quelques clignotements. Le nombre de
clignotement identifie le pourcentage de manœuvres effectuées (en multiples de 10%) par rapport à la
limite programmée. Par exemple: avec l'avis de maintenance programmé sur L6, c'est-à-dire 10000,
10% correspondent à 1000 manœuvres; si la led de signalisation émet 4 clignotements, cela signifie
que l'on a atteint 40% des manœuvres (c'est-à-dire entre 4000 et 4999 manœuvres). Si l'on n'a pas
atteint 10% des manœuvres il n'y aura aucun clignotement.
8. Relâcher la touche [Set]
Tableau 17: vérification du nombre de manœuvres effectuées Exemple
SET
SET
SET
SET
.... n=?
Mise à zéro du compteur des manœuvres
Après avoir effectué la maintenance de l'installation, il faut mettre à zéro le compteur des manœuvres. Procéder suivant les indications du
tableau 18.
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s
pendant 3s
2. Relâcher la touche [Set] quand la led L1 commence à clignoter
L1
3. Presser les touches [▲] ou [▼] pour déplacer la led clignotante sur L7, c'est à dire la “led d'entrée”
qui correspond au paramètre “Avis de maintenance” ou L7
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5 et 6
5. Attendre environ 3 s puis la led qui représente le niveau actuel du paramètre “Avis
de maintenance” s'allumera 3s
6. Presser et maintenir enfoncées les touches [▲] et [▼], pendant au moins 5 s puis relâcher les 2 touches
La led correspondant au niveau sélectionné effectuera une série de clignotements rapides pour signaler
que le compteur des manœuvres a été mis à zéro.
et
7. Relâcher la touche [Set]
Tableau 18: mise à zéro du compteur des manœuvres Exemple
SET
SET
SET
SET
7.5 Connexion d'autres dispositifs
S'il est nécessaire d'alimenter des dispositifs extérieurs, par exemple
un lecteur de proximité pour cartes à transpondeur ou bien l'éclaira-
ge du sélecteur à clé, il est possible de prélever l'alimentation com-
me l'indique la figure 27. La tension d'alimentation est de 24 Vcc -
30% ÷ +50% avec courant maximum disponible de 100 mA.
.
-+
24Vcc
27

73
F
7.7) Diagnostic et signalisations
Certains dispositifs offrent directement des signalisations particu-
lières à travers lesquelles il est possible de reconnaître l'état de fonc-
tionnement ou l'éventuel problème.
7.6) Résolution des problèmes
Dans le tableau 19 on peut trouver des indications utiles pour affron-
ter les éventuels problèmes de fonctionnement pouvant se vérifier
durant l'installation ou en cas de panne.
29
Tableau 19: recherche des pannes
Symptômes Vérifications conseillées
L'émetteur radio ne commande pas le portail et
la led sur l'émetteur ne s'allume pas
L'émetteur radio ne commande pas le portail
mais la led sur l'émetteur s'allume.
Aucune manœuvre n'est commandée et la led
“BLUEBUS” ne clignote pas.
Aucune manœuvre n'est commandée et le cli-
gnotant est éteint.
Aucune manœuvre n'est commandée et le cli-
gnotant fait quelques clignotements
La manœuvre commence mais juste après on a
une inversion.
La manœuvre est effectuée régulièrement mais
le clignotant ne fonctionne pas.
La manœuvre est effectuée régulièrement mais
le voyant SCA ne fonctionne pas.
Vérifier si les piles de l'émetteur sont usagées et les remplacer éventuellement.
Vérifier si l'émetteur est correctement mémorisé dans le récepteur radio
Vérifier que les fusibles ne sont pas interrompus; si c'est le cas, vérifier la cause de la
panne et les remplacer par d'autres ayant la même valeur de courant et les mêmes
caractéristiques.
Vérifier que la commande est effectivement reçue. Si la commande arrive à l'entrée PP
la led “PP” correspondante doit s'allumer; si par contre on utilise l'émetteur radio, la
led “Bluebus” doit faire deux clignotements rapides.
Compter le nombre de clignotements et vérifier suivant les indications du tableau 21.
La force sélectionnée pourrait être trop basse pour le type de portail. Vérifier s'il y a
des obstacles et sélectionner éventuellement une force supérieure.
Vérifier que durant la manœuvre la tension arrive à la borne FLASH du clignotant (comme
il est intermittent, la valeur de tension n'est pas significative: environ 10-30 Vcc); si la ten-
sion arrive, le problème est dû à l'ampoule qui devra être remplacée par une autre de
caractéristiques identiques; s'il n'y a pas de tension, il pourrait y avoir un problème de
surcharge sur la sortie FLASH, vérifier qu'il n'y a pas de court-circuit sur le câble.
Vérifier le type de fonction programmée pour la sortie SCA (Tableau 9).
Quand le voyant devrait être allumé, vérifier que la tension arrive à la borne SCA (environ
24 Vcc); si la tension arrive, le problème est dû au voyant qui devra être remplacé par un
autre de caractéristiques identiques; s'il n'y a pas de tension, il pourrait y avoir un problè-
me de surcharge sur la sortie SCA, vérifier qu'il n'y a pas de court-circuit sur le câble.
F2
F1
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s
pendant 3s
2. Relâcher la touche [Set] quand la led L1 commence à clignoter
L1
3. Presser les touches [▲] ou [▼] pour déplacer la led clignotante sur L8, c'est-à-dire la “led d'entrée”
pour le paramètre “Liste des anomalies” ou L8
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5 et 6
5. Attendre environ 3 s puis les led correspondant aux manœuvres qui ont eu des anomalies s'allumeront.
La led L1 indique le résultat de la manœuvre la plus récente, la led L8 indique le résultat de la huitième.
Si la led est allumée, cela signifie que des anomalies se sont vérifiées durant la manœuvre; si la led est
éteinte, celasignifie que la manœuvre s'est terminée sans anomalies.
6. Presser les touches [▲] et [▼] pour sélectionner la manœuvre désirée.
La led correspondante émettra un nombre de clignotements égal à ceux qui sont exécutés
normalement par le clignotant après une anomalie (voir tableau 21).
et
7. Relâcher la touche [Set]
Tableau 20: historique des anomalies Exemple
SET
SET
SET
SET
7.6.1) Liste historique des anomalies
ROBUS permet d'afficher les éventuelles anomalies qui se sont vérifiées lors des 8 dernières manœuvres, par exemple, l'interruption d'une manœu-
vre due à l'intervention d'une photocellule ou d'un bord sensible.Pour vérifier la liste des anomalies procéder suivant les indications du tableau 20.
3s
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
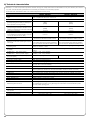 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
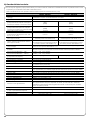 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
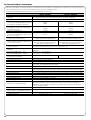 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
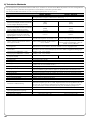 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
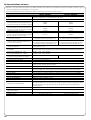 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
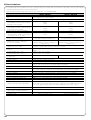 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
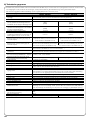 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
























































































































































































Nice Robus 1000 Instructions And Warnings
- Taper
- Instructions And Warnings
- Ce manuel convient également à
dans d''autres langues
- italiano: Nice Robus 1000
- English: Nice Robus 1000
- español: Nice Robus 1000
- Deutsch: Nice Robus 1000
- Nederlands: Nice Robus 1000
- polski: Nice Robus 1000
Documents connexes
Autres documents
-
Nice Automation Robus and Robuskit Le manuel du propriétaire
-
-
-
-
-
-
Nice Apollo Moonbus MOFB & MOFOB Le manuel du propriétaire
-
-
-