SBC PCD2.H222 & PCD3.H222 stepper motor module Le manuel du propriétaire
- Taper
- Le manuel du propriétaire

Document n° 26-878 | Version FRA05 | 2017-05-30
Module de moteur pas à pas PCD2/3.H222
Manuel

Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG
Table des matières
0-1
0
0 Table des matières
0.1 Historique de document .................................................................................. 0-3
0.2 Marques .......................................................................................................... 0-3
1 Introduction
1.1 Fonctionnement et utilisation .......................................................................... 1-1
1.2 Les principales caractéristiques ...................................................................... 1-2
1.3 Domaines d’application typiques .................................................................... 1-2
1.4 Dimensions ..................................................................................................... 1-2
2 Caractéristiques techniques
2.1 Caractéristiques techniques du matériel ......................................................... 2-1
2.1.1 Alimentation 24 VCC ....................................................................................... 2-1
2.1.2 Alimentation 5 VCC au bus PCD1/2/3 ............................................................ 2-1
2.1.3 Entrées ............................................................................................................ 2-1
2.1.4 Sorties ............................................................................................................. 2-1
2.1.5 Connexions bidirectionnelles .......................................................................... 2-2
2.1.6 Conditions de service ...................................................................................... 2-2
2.1.7 Données de commande .................................................................................. 2-2
2.2 Bornes ............................................................................................................. 2-3
2.3 AchageàDEL .............................................................................................. 2-4
3 Description du fonctionnement
3.1 Paramétraged’unproldecourse .................................................................. 3-1
3.1.1 Correctionautomatiquedeprol ..................................................................... 3-2
3.2 Indicationdelalongueurdecourse ................................................................ 3-2
3.2.1 Indicationdelongueurdecourserelative ....................................................... 3-2
3.2.2 Indication de cible absolue .............................................................................. 3-2
3.3 Comportementencasd’arrêtd’urgence(EmergencyStop) ........................... 3-2
3.4 Comportement en cas d’actionnement d’un fdc en cours de marche ............. 3-3
3.5 Démarraged’unaxesurévénement ............................................................... 3-3
3.6 Positionnementsurcontacteurndecourse .................................................. 3-3
3.7 Course de référence ....................................................................................... 3-4
3.7.1 Recherchedundecourse,
suivie de la course jusqu’au contacteur de référence ..................................... 3-4
3.7.2 Recherche du contacteur de référence
au-delàdescontacteursdendecourse ....................................................... 3-4
3.7.3 Atteinte et dépassement du contacteur de référence ..................................... 3-5
3.8 Incréments unitaires ........................................................................................ 3-5
3.9 Positionnementàvitesseconstante ............................................................... 3-5
3.10 Positionnementsurproldecourse ................................................................ 3-5
3.11 Arrêt d’un mouvement .................................................................................... 3-5
0 Table des matières

Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG
Table des matières
0-2
0
4 Fonctions programmables dans PG5
4.1 Accèspardesblocsdefonctions(FB) ........................................................... 4-1
4.1.1 Indicateuretregistredediagnostic ................................................................. 4-2
4.1.2 FB init .............................................................................................................. 4-2
4.1.3 FB initMP ........................................................................................................ 4-3
4.1.3 FB exec ........................................................................................................... 4-4
4.1.5 Commandes .................................................................................................... 4-6
4.1.6 Instructions d’écriture ...................................................................................... 4-7
4.1.7 Instructions de lecture ..................................................................................... 4-8
4.2 CongurationdusystèmeavecleCongurateurd'appareil ........................... 4-11
4.3 Propriétés ........................................................................................................ 4-13
4.4 Jeu d’instructions - Accès direct ...................................................................... 4-14
4.4.1 Instructions d’écriture ...................................................................................... 4-14
4.4.2 Instructions de lecture ..................................................................................... 4-16
5 Adaptations du programme en cas de remplacement d'un module
H210 par un module H222
6 Exemples
6.1 Matériel PCD2 ................................................................................................ 6-1
6.2 Matériel PCD3 ................................................................................................ 6-2
6.3 Descriptionduprogramme .............................................................................. 6-3
6.4 CodeduprogrammeIL ................................................................................... 6-3
A Annexe
A.1 Icones ............................................................................................................. A-1
A.2 AdressedelasociétéSaia-BurgessControlsAG ........................................... A-2

Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG
Table des matières
0-3
0
0.1 Historique de document
Version Traitement Publication Remarques
FR01 2011-01-03 2011-04-15 Première édition
FR02 2011-08-25 2011-08-26 - Nouveau numéro de Téléphone:
+41 26 672 72 72
Corrigélenomdelavariable:
« IO.Slot0.IOAccess.X_AXIS_RD_ACTPOSABS »
FR03 2013-06-17 2013-08-14 Changementdulogoetnom
FR04 2014-02-19 2014-02-19 Plusieurschangementsdanslemanuelentier
FR05 2017-05-30 2017-05-30 - Nouveau numéro de Téléphone:
+41 26 580 30 00
-Ligne«
IO.Slot0.IOAccess.X_AXIS_RD_WARN
»
de 4.4.2 supprimé.
0.2 Marques
Saia PCD
®
estunemarquedéposéedeSaia-BurgessControlsAG.
Sousréserved’adaptationsetdemodicationstechniquesselonl’étatdelatech-
nique.
Saia-BurgessControlsAG,2017.© Tous droits réservés.
Publié en Suisse

Fonctionnement et utilisation
Introduction
1-1
1
1 Introduction
Cemoduleestenchabledanstoutemplacementd’E/Sd’unePCD2ouPCD3.
Ilpermetdecommanderleniveaudepuissanced’unaxedemoteurpasàpas
jusqu’àunefréquencede20kHz.
Le nombre maximum de modules est déterminé par la limite des extensions PCD2 ou
PCD3. Aucun module ne doit occuper l’adresse 255.
1.1 Fonctionnement et utilisation
LemodulePCD2/3.H222permetdecommanderdeuxétagesdesortiedemoteur
pasàpas.Ilprendenchargelacommandedesmouvementssouhaitésettransmetà
l’étagedesortielestroissignauxMOTEN(activation),DIR(sensderotation)etPUL
(impulsion).Outrelesincrémentsunitairesetplusieursincrémentsàvitessecons-
tante,ilestpossibled’exécuterdesprolsdedéplacementtrapézoïdauxouenSà
rampesd’accélérationetdefreinageasymétriques.Lespositionnementsabsolusou
relatifs sont possibles.
ChaqueaxedisposedetroisentréespourLS1(contacteurdendecourse),LS2
(contacteurdendecourse)etREF(contacteurderéférence).Cecipermetde
déclencher le positionnement par une seule instruction envoyée au contacteur
correspondant.
UnconnecteurTRIG(«trigger»oudéclencheur)congurableparaxepermetde
déclencherl’exécutiond’unmouvementparunsignal24Vquelconque.Lorsque
leconnecteurTRIGestutilisécommeentréepourunaxeetcommesortiepourun
autre,lesprolsdemouvementpeuventdémarrerdemanièresynchroneenagissant
comme une commande maître par rapport aux modules.
Chaquemoduledisposed’uneautreentréepourladétectiondesarrêtsd’urgence.
Touteslesentréesetsortiessontisoléesgalvaniquementdubusd’E/S.
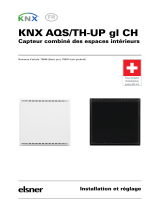
Diagramme synoptique d’une entraînement par moteur pas à pas
5V
Automate pas à pas Y
Automate pas à pas X
LS1
LS2
REF
+
Ajustement
signal et filtre
d’entrée
Arrêt d’urgence
Montage E/S
TRIG
SM
CHARGE
PILOTE-X
MOTEN
DIR
PUL
LS1
LS2
REF
+
TRIG
SMPILOTE-Y
MOTEN
DIR
PUL
Automate pas à pas
Bus d’E/S
PCD2/3
Module pas à pas
PCD2/3.H222
24V 0V
Alimen-
tation
Interface
bus
Isol. galvanique
CHARGE
Ajustement
signal et filtre
d’entrée
Montage E/S
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Caractéristiques | Domaines d’application | Dimensions
Introduction
1-2
1
1.2 Les principales caractéristiques
● Uneentréed’arrêtd’urgencecommune
● 3entréesparaxe(1contacteurderéférenceet2contacteursdendecourse)
● 3sortiesparaxe(Pulse,Dir,MotEn)
● EinkongurierbarerSynchronisier-Ein-/AusgangproAchse
● Possibilitésdepositionnement:incrémentunitaire,vitesseconstante,prols
demouvement;automatischaufReferenz-oderEndschalterfahren
● 16prolsparaxepourleparamétraged’unecourbeenSoutrapézoïdale
metrischer Start- und Bremsrampe
● Indicationdelapositionrelativeouabsolue.
● Mouvementscontinus.
1.3 Domaines d’application typiques
● Handling-undMontageautomaten
● Fonctionsdepriseetdepose
● Entraînementséconomiquesdepalletisationetdemontage.
● Commandeangulaireautomatique(caméras,projecteurs,antennes,etc.)
● Positionnementd’axesstatiques(setup).
1.4 Dimensions
Module PCD3
Dimension : module d’E/S PCD3
Couleur du boîtier : bleu
Raccordement : 2 borniers à ressort
10brochesenchables
Module PCD2
Dimension : module d’E/S PCD3
Raccordement:2borniersàressort10con-
tactsenchables
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Caractéristiques techniques du matériel
Caractéristiques techniques
2-1
2
2 Caractéristiques techniques
2.1 Caractéristiques techniques du matériel
2.1.1 Alimentation 24 VCC
Paramètre Valeur
Plagedetension 18…32 VCC
Consommationdecourantà24V < 80 mA
Protection anti-surtension Oui(39V±10%)
Protection en cas d’inversion de
phase
Non
2.1.2 Alimentation 5 VCC au bus PCD1/2/3
Paramètre Valeur
Consommationdecourantà5V < 85 mA
2.1.3 Entrées
Paramètre Valeur
Total 7
Plagedetension 0 … 32 V
PlageBas 0 … 5 V
PlageHaut 15 … 32 V
Seuil de commutation Bas-Haut env.10,9V
Seuil de commutation Haut-Bas env.9,1V
Hystérésis env.1,8V
Courantd’entrée(24V) env.5,2mA
Retardàl’enclenchement env. 200 µs
Retard au déclenchement env. 200 µs
2.1.4 Sorties
Paramètre Valeur
Total 6
Impulsionsunitaires(PUL) Actif haut
Duréed’impulsiondusignalunitaire 16,5µs
Signaldedirection(DIR) Bas=avance(senshoraire[cw])
Haut=recul(sensantihoraire[ccw])
Signaldemouvement(MOTEN) Haut = moteur activé
Bas = moteur désactivé
Chargeparsortie < 20 mA
Mode de fonctionnement Récepteur(commutationsurmoins)
Retardàl’enclenchementMOTEN,
DIR
< 15 µs
RetardaudéclenchementMOTEN,
DIR
< 25 µs
Retardàl’enclenchementPUL <1,5µs
RetardaudéclenchementPUL < 500 ns
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Caractéristiques techniques du matériel
Caractéristiques techniques
2-2
2
2.1.5 Connexions bidirectionnelles
Il existe deux connexions bidirectionnelles :
entrée/sortieTRIGaxeX
entrée/sortieTRIGaxeY.
Ces connexions sont utilisables en entrée ou en sortie. Ceci permet de déterminer un
axe maître pour la synchronisation des axes esclaves.
Caractéristiques d’utilisation en entrée
Paramètre Valeur
Plagedetension 0 … 32 V
PlageBas 0 … 5 V
PlageHaut 15 … 32 V
Seuil de commutation Bas-Haut env.9,3V
Seuil de commutation Haut-Bas env. 11 V
Hystérésis env.1,7V
Courantd’entrée(24V) 3,85mA
Retardàl’enclenchement < 170 µs
Retard au déclenchement < 184 µs
Caractéristiques d’utilisation en sortie
Paramètre Valeur
Plagedetension 0 … 32 V
PlageBas 0 … 5 V
PlageHaut 15 … 32 V
Chargeparsortie > 200 mA
Retardàl’enclenchement <1,5µs
Retard au déclenchement < 28 µs
Mode de fonctionnement Générateur
2.1.6 Conditions de service
température ambiante Service : 0...+55 °C sans ventilation for-
cée.Entreposage-20...+85°C
2.1.7 Données de commande
Type Description Poids
PCD2.H222 Modulepasàpaspour
2 axes
27g
PCD3.H222 Modulepasàpaspour
2 axes
70g
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Bornes
Caractéristiques techniques
2-3
2
2.2 Bornes
DEL 4 LS1/LS2
DEL 5 DIR Y
DEL 6 EMSTOP
DEL d'état 7
DEL 0 REF X
DEL 1 LS1/LS2
DEL 2 DIR X
DEL 3 REF Y
Axe X
H
2
2
2
Axe Y
Axe X
0 EMSTOP LS1 1
2 LS2 REF 3
4 TRIG MOTEN 5
6 DIR PUL 7
8 0 V 24 V 9
Axe Y
0 LS1 1
2 LS2 REF 3
4 TRIG MOTEN 5
6 DIR PUL 7
8 0 V 24 V 9
Uncontactd’arrêtd’urgencepeutêtreraccordéàl’entréeEMSTOP.Lagure
indiquel’aectationdesbornes.Cetteentréepermetdedétecterunedéconnexion
pourarrêtd’urgenceetnedoitpasêtreutiliséepourunefonctiondesûreté.Les
connexionsLS1,LS2etREFsontdesentréesprévuespourlepositionnementsur
undescontacteurs.Enoutre,LS1etLS2limitentlaplageutiled’unaxedemoteur
pasàpas.Cesentréespeuventêtreconguréespourutiliseraussibienuncontact
travailqu’uncontactreposetpourdésactiveruncontacteurnonraccordé,d’oùune
meilleure détection des erreurs.
Lorsquel’unedecesentréesestdésactivée,ellepeutêtreutiliséecommeentrée
numérique.Aceteet,leregistred’étatdesE/Sdoitêtreluparleprogramme
utilisateur.
LaconnexionTRIGestcongurableenentréeouensortieetsertàdémarrerunaxe
sur événement.
Lorsquelaconnexionestactivéeetconguréeenentrée,lemouvementdémarrépar
leprogrammeutilisateurnedémarrequelorsque24Vsontappliquésàlaconnexion
TRIG.
Lorsqu’elleestutiliséeensortie,laconnexionTRIGestconnectéeetdéconnectéeen
mêmetempsquelesignaldesortieMOTEN.
MOTEN,DIRetPULsontdessortiesutiliséesenmodeconsommateurpour
commanderl’étagedesortiedumoteurpasàpas.
Lemoduleestalimentéencourantparlaconnexion+24Vet0V.Cesdeuxsignaux
sontreliésentreeuxeninterneparlesbornesdesaxesXetY.
SaufpourlessignauxMSTOP,+24Vet0V,touslessignauxsontprésentsunefois
pourl’axeXetunefoispourl’axeY.
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Bornes
Caractéristiques techniques
2-4
2
2.3 AfchageàDEL
Axe X
DEL 0 Tensionàl’entréeREF
DEL1(rouge) Tensionàl’entréeLS1
DEL1(vert) Tensionàl’entréeLS2
DEL2(rouge) Tension aux sorties MOTEN et DIR
DEL2(vert) TensionàlasortieMOTENet0VàlasortieDIR
AxeY
DEL 3 Tensionàl’entréeREF
DEL4(rouge) Tensionàl’entréeLS1
DEL4(vert) Tensionàl’entréeLS2
DEL5(rouge) Tension aux sorties MOTEN et DIR
DEL5(vert) TensionàlasortieMOTENet0VàlasortieDIR
Pour les deux axes
DEL 6 : Tensionàl’entréeEMSTOP
DEL 7 : Visualisation des états de fonctionnement et des codes
d’erreur
EMSTOPetREFsontvisualiséesparuneDELmonocolore.LS1etLS2sontsigna-
liséesparuneDELbicolore(rougepourLS1etvertepourLS2).L’étatdeDIRetde
MOTENestégalementsignaléparuneDELbicolore.SiMOTEN=1,lacouleurdela
DELdépenddusensderotationDIR(rougepourlesensantihoraire«ccw»etvert
pourlesenshoraire«cw»).
LaDEL7signaleuneerreuréventuellesurl’undesdeuxaxes.
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Description du fonctionnement
Paramétraged’unproldecourse
3-1
3
3 Description du fonctionnement
Le module H222 s’utilise avec une PCD2 ou une PCD3 et est commandé par un ac-
cèspériphériqueàpartirduprogrammeutilisateurCetaccèsdéclenchelacommuni-
cation entre le PCD et le H222 par le bus d’E/S standard. Le module détecte automa-
tiquementlesnouvellesinstructionsdecourseetengagelesopérationsnécessaires
pour leur traitement.
3.1 Paramétraged’unproldecourse
And’éviterauPCDdedevoirenvoyeraumoduleàchaquefoistouslesparamètres
d’unproldecourse,16prolspeuventêtredénisetmémorisésunefoispourtoutes.
Unproldecourseestdéniparlesparamètressuivants:
Paramètre Description Plage,unité Résolution,remarque
Vmin Vitessededémarrage/arrêt 10…10000Hz 1Hz(16bits)
Vmax Vitesse maximale 20…20000Hz 1Hz(16bits)
Acc Accélération moyenne 1...1000kHz/s 1kHz(16bits)
Dec Décélération moyenne 1...1000kHz/s 1kHz(16bits)
Jerk_acc Pourcentagedejerkdela
rampededémarrage
0...50% 1%(6bits)
Jerk_dec Pourcentagedejerkdela
rampe de décélération
0...50% 1%(6bits)
Lesdeuxvaleursdejerkindiquentladuréeenpourcentagedelaphase
d’accélérationoudefreinageàl’issuedelaquellel’accélérationouladécélération
linéairesdoiventêtreatteintes.Laduréedelaphaselinéaireestalorségaleà
100%-2*valeurdejerk.Unevaleurdejerkde0%correspondàunproldecourse
trapézoïdal,tandisqu’unevaleurde50%correspondàunecourbeenS.
t
V
Vmin
Vmax
t
V
Vmin
Vmax
Laduréed’exécutiondechacundesprolsestdéterminéeparcesparamètresetpar
lalongueurdecourse.
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Description du fonctionnement
Paramétrage
3-2
3
3.1.1 Correctionautomatiquedeprol
Sidesvaleursderéglagesesituenthorsdelaplageadmissible,lemodulelescorri-
geautomatiquementenlesremplaçantparlavaleurminimaleoumaximaleselonle
cas.Unsignald’avertissementestémis.SilavaleurdeVmin,Vmax,AccouDecest
égaleà0,leproln’estpasexécutéetunmessaged’erreurestémis.
Il existe entre certains paramètres d’entrée des relations qui doivent être respectées.
Danslecascontraire,ilsepeut,parexemple,qu’unecourbeenSrégléesoit
ramenéeàunproltrapézoïdalpouréviterdeserreursd’indexation.
3.2 Indication de la longueur de course
Lalongueurdecourseestindiquéeindépendammentduproldecourse,qu’ilsoit
relatif,absoluoucontinu,cedernierétantuncasspéciald’indicationd’unelongueur
decourserelative.Lesindicationsdelongueurdecourseinuentsurlesmodesde
positionnement«àvitesseconstante»et«surproldecourse».
3.2.1 Indication de longueur de course relative
Unelongueurdecourserelativeestindiquéeennombred’incrémentsàexécuter.Le
sensderotationestalorsàindiqueraumomentdudémarragedumouvement.Le
nombreadmissibled’incrémentsestsituéentre0et16777215,cederniernombre
correspondantàunmouvementcontinu.Touteslesautresvaleursinduisentle
nombre d’incréments correspondant.
3.2.2 Indication de cible absolue
Dansunpositionnementabsolu,lepointnalpeutêtreindiquésansquelaposition
réellesoitconnue.Lemodulecalculelui-mêmelalongueurdecourserelativeetle
sensderotationenfonctiondelapositionabsolue.Audémarragedumouvement,le
paramètredetransfert«sensderotation»estnégligé.
3.3 Comportement en cas d’arrêt d’urgence (Emergency Stop)
L’entréed’arrêtd’urgencepermetd’arrêterunmouvementencoursavecunerampe
defreinageprédéniesurlesdeuxaxes.Etantdonnéquelapositionréellene
correspondplusaprèsunemisehorscircuitrapidedéclenchéeenexterne,l’undes
contacteursdendecourseoulecontacteurderéférencedoitêtreactionnéaprès
unarrêtd’urgence.
Unemisehorscircuitrapideliéeàunefonctiondesûretédoitintervenirindépendamment
du module.
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Description du fonctionnement
Paramétrage
3-3
3
3.4 Comportement en cas d’actionnement d’un fdc en cours de marche
L’actionnementdeLS1ouLS2déclencheautomatiquementunerampedefreinage.
Lapositionabsolueactuellen’estpasperdue.Unmessaged’erreuresttoutefois
émis,lequeldoitêtreacquitté.Uncontacteurdendecourse(fdc)nepeutquittersa
plaged’actionnementquemoyennantunpositionnementsurluiouparl’exécutionde
la course de référence.
3.5 Démarrage d’un axe sur événement
LorsquelaconnexionTRIGestconguréeenentréeetactivée,lesinstructionsde
coursepeuventêtrelancéespourunaxedontledémarrageseraconditionnépar
l’applicationde24VàlaconnexionTRIG.N’importequelsignalnumériquede24V
peutêtreutiliséàceteet.
Sideuxouplusieursaxesdoiventdémarrerensynchronisme,laconnexionTRIG
doitêtreconguréeenentréeetactivéepourlesaxesconsécutifs.Pourl’axemaître,
la connexion est activée comme sortie. Toutes les connexions doivent être reliées
ensembleparuncâbleenexterne.Lesconsignesdecoursedetouslesaxes
consécutifssontlancéesd’abord.Lesaxesattendentensuitel’apparitiondusignal
dedémarrageàlaconnexionTRIG,lequelintervientlorsquel’axemaîtredémarreà
l’instant correspondant.
3.6 Positionnementsurcontacteurndecourse
Danslecasd’unecoursesurcontacteurndecourse,deuxpositionsinitialessont
àdistinguer:oubienils’agitd’unecoursequisedérouleentredeuxnsdecourse,
endirectiondel’und’entreeuxavecleproldevitesseréglé,avecfreinagejusqu’à
l’arrêtdèsl’actionnementdundecourseetredémarrageavecVmindanslesens
opposéjusqu’àrelâchementdundecourse,oubienils’agitd’unecoursesur
laplageactivedel’indicateurdundecourse.Danscecas,lacourses’eectue
directementàVminsurlaplagevalideentrelesnsdecoursejusqu’àrelâchement
dundecourse.
Iln’estpaspossibled’actionnerdirectementlendecourseleplusprochehorsde
laplagevalide(au-delàdesdeuxnsdecourse).Pourcefaire,laplagevalidedoit
d’abord être parcourue.
Lepositionnementsurl’undesdeuxnsdecourseestlancéparl’accèspériphérique
et,selonl’axesouhaité,parl’instructionX_AXIS_WR_LSREFMOVEou
Y_AXIS_WR_LSREFMOVE.Lendecoursesurlequeldoits’eectuerle
positionnementestdéterminéparleparamètredetransfert(1=LS1,2=LS2).
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Description du fonctionnement
Course de référence
3-4
3
3.7 Course de référence
Il existe plusieurs modes de positionnement sur le contacteur de référence connecté.
Cedernierdoitêtreactionnéquelquesoitlemode;unmessaged’erreurestémis
dans le cas contraire.
3.7.1 Recherchedundecourse,
suivie de la course jusqu’au contacteur de référence
Silaréférenceestprisedanslesensd’avance(modedecoursederéférence3),
lacourses’eectued’abordselonleproldevitesseactifjusqu’àl’actionnement
ducontacteurderéférenceouducontacteurdendecourse,cequidéclenche
lefreinage.Unefoisàl’arrêt,lesensdedéplacementestinverséetlacourse
s’eectueselonleproldevitessejusqu’aucontacteurderéférence.Ladécélération
commenceàl’actionnementducontacteurderéférence.Sic’estl’autrecontacteur
quiestactionné,lacoursederéférences’interromptetundéfautestaché.
Silecontacteurderéférenceestactionnéàl’issuedelarampededécélération,la
coursesepoursuitàVminsansinterruptionjusqu’aurelâchementducontacteur
deréférence.Danslecascontraire,lacourses’eectued’abordàVmindansle
sens inverse jusqu’au contacteur deréférenceet,seulementensuite,danslesens
d’avancepourquitterlaplaged’actionnementducontacteur.
REFLS1 REF LS2
Mode de course de référence 3 Mode de course de référence 4
3.7.2 Recherche du contacteur de référence
au-delàdescontacteursdendecourse
Le mode de course de référence 5 permet de monter le contacteur de référence au-
delàdesnsdecourseetd’allerjusqu’aucontacteurderéférencebienquelesns
de course soient activés.
REFLS1 REF LS2
Mode de course de référence 5 Mode de course de référence 6
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Description du fonctionnement
Course de référence
3-5
3
3.7.3 Atteinte et dépassement du contacteur de référence
Danscemodederéférencement,ledémarrages’eectuedirectementdanslesens
derotationnal,avecdépassementducontacteurderéférence.Si,enmodede
coursederéférence7,LS1estactionné(danslamesureoùilestactivé),lacourse
deréférences’interromptetunmessaged’erreurestémis.Ilenvademêmepourle
mode 8 et LS2.
REFLS1 REF LS2
Mode de course Mode de course
de référence 7 de référence 8
3.8 Incréments unitaires
Tout incrément unitaire nécessite un ordre du PCD. Celui-ci est émis avec la valeur
devitessedéniepourVmin.Enl’absencedeceréglage,l’incrémentunitaireest
xéà10Hz.Lacadenceincrémentiellemaximaleadmissibleenmodepasàpasest
égaleà350Hz.
3.9 Positionnementàvitesseconstante
UnmouvementquidémarreàVminutiliseleparamètreVminetlenombre
d’incrémentsàexécuter.Sicenombreestxéà16777215(2
24
-1),lemouvement
démarreàVminetnes’arrêtequ’àl’atteinteducontacteurndecourse
correspondantouàlaréceptiond’uneinstructiond’arrêtémisparleprogramme
utilisateur.
3.10 Positionnementsurproldecourse
Cemodedepositionnement,quiestlepluscourant,estceluiquipermet
d’atteindreleplusrapidementlapositioncible.Ilutiliselesparamètresdeprolde
courseactuelsetunprolencourbeenS,trapézoïdal,triangulaireouàvitesse
constanteestexécutéenfonctionduréglagedesparamètresetdeladistancede
positionnement.
3.11 Arrêt d’un mouvement
Unmouvementlancépeutêtreinterrompuparuneinstructiond’arrêt.L’axeestmisà
l’arrêtselonlarampedefreinageprédénie.Cetteinstructiondéclencheunmessage
d’erreur qui doit être acquitté avant la prochaine instruction de course.
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Fonctions programmables dans PG5
Accèspardesblocsdefonctions(FB)
4-1
4
4 Fonctions programmables dans PG5
Soyezattentifauxdiérentespossibilitésdecommandedumoduleparaccèsdirect(Media
Mapping)oublocsdefonction(FB).
4.1 Accès par des blocs de fonctions (FB)
LemoduleH222estintégrédansunPCD2ouunPCD3etcommandéàl'aidede
blocsdefonction(FB)dansl'outildeprogrammationPG5.CesFBdéclenchentune
communicationentrelePCDetlemoduleH222vialebusd'E/Sstandard.Ainsi,les
paramètresdedéplacementetlesinstructionsdecoursesontdénisdansleregistre
correspondantdumicrocontrôleursurlemoduled'extension.
Lemicroprogrammedumoduledétecteautomatiquementlesnouvellesinstructions
decourseetengagelesmesuresnécessairesàleurtraitement.And’éviterauSPS
dedevoirenvoyeràchaquefoisaumoduletouslesparamètresd’unproldecourse,
16prolsactivésparunecommandeuniquepeuventêtredénisetmémorisésune
fois pour toutes.
Lemodulepermetderaccorderdescontacteursd’arrêtd’urgence,dendecourse
etderéférence.Unemisehorscircuitrapideliéeàunefonctiondesûretédoittoute-
foisintervenirdemanièreexterne.Cesentréespeuventêtreconguréespourutiliser
aussi bien un contact travail qu’un contact repos et pour désactiver un contacteur non
raccordé,d’oùunesécuritéaccruegrâceàunemeilleuredétectiondeserreurs.
Lemoduleestinitialiséàl'aided'unblocdefonction«Init».Leblocdefonction
«InitMP»permetdetransmettreunproldecoursecompletavecunappeldeFB.
LeFB«Exec»permetdetransmettreunecommande(«command»).Enfonction
dutyped'instruction,unoctetdedonnéesestfourniouluentantqueparamètrede
retour.Unelistedetouteslescommandesadmissiblesetleurdescriptionguredans
le chapitre
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Fonctions programmables dans PG5
Accèspardesblocsdefonctions(FB)
4-2
4
4.1.1 Indicateur et registre de diagnostic
Leregistredediagnosticetl'indicateurdediagnosticsontmisàjourpourchaqueaxe
initialisé après les actions correspondantes.
Structure du registre de diagnostic rDiag :
; 31.....24 23......16 15........8 7..........0
; \ Error / \ FB No. / \ Par.No. / \Module No./
;
; Error: 00h -> No special error
; 01h -> H222 FB already in use
; FB No.: 01h -> H222.Init
; 02h -> H222.InitMP
; 03h -> H222.Exec
; Par.No.: 00h -> No parameter error
; 01h -> Module number not correct
; 02h -> Axis number not correct
; 03h -> Command code not correct (<0 or >255)
; Module No: Number of the Module (FB parameter 1) which
; causes the error
4.1.2 FB init
CeFBinitialisetouslesmodulesH222quiontétédénisdanslechier.equcorre-
spondant.fDiagindiquesiuneerreurs'estproduiteoupaspendantl'initialisation.
rDiagpermetdel'identier.
L'appel du FB « INIT » se présente comme suit :
CFB H222.Init
RrDiag ;Par.1:registredediagnostic
FfDiag ;Par.2:indicateurd'état(0:InitOK,1:
erreur)
Oureprésentésousformed'appeldeFB:
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Fonctions programmables dans PG5
Accèspardesblocsdefonctions(FB)
4-3
4
4.1.3 FB initMP
CeFBinitialiseunproldedéplacement(MP:motionprole)etcongurelescon-
tacteursd’arrêtd’urgence,dendecourseouderéférence.rDiagfournitunacquit-
tementquipermetdedéterminerlacauseencasd'erreur.fDiagindiquesiuneerreur
s'estproduiteoupaspendantl'initialisation.
L'appel du FB « INITMP » se présente comme suit :
CFB H222.InitMP
RmodNr ;Par.1:adressedebasedumodule
RaxisNr ;Par.2:numérodel'axe(0=axeX,1=axeY)
RVmin ;Par.3:VminenHz
RVmax ;Par.4:VmaxenHz
RAccel ;Par.5:accélérationenkHz/s
RDecel ;Par.6:décélérationenkHz/s
RJerkAcc ;Par.7:pourcentagedejerkdel'accélération(0à50%)
RJerkDec ;Par.8:pourcentagedejerkdeladécélération(0à
50%)
RrDiag ;Par.9:registredediagnostic
FfDiag ;Par.10:indicateurd'état(0:InitMPOK,1:erreur)
Oureprésentésousformed'appeldeFB:
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Fonctions programmables dans PG5
Accèspardesblocsdefonctions(FB)
4-4
4
4.1.3 FB exec
Leblocindividuel«exec»permetd'exécuterlesinstructionssuivantesetdefournir
d'autresdonnées,commelesensderotation,etc.D'autrescommandesfournissent
desvaleursderetour(voirdescriptiondescommandes).fDiagsignalequ'uneerreur
s'estproduiteetrDiagpermetdeluiattribuerunecause.
L'appel du FB « EXEC » se présente comme suit :
CFB H222.Exec
RmodNr ;Par.1:adressedebasedumodule
RaxisNr ;Par.2:numérodel'axe(0=axeX,1=axeY)
RrCommand;Par.3:commande(voirlistedecommandesci-dessous)
RrData ;Par.4:paramètredetransfertoulecture(enpartie
facultatif)
RrDiag ;Par.5:registredediagnostic
FfDiag ;Par.6:indicateurd'état(0:ExecOK,1:erreur)
Oureprésentésousformed'appeldeFB:
Le bloc FB exec prend en charge les instructions suivantes (Command) :
Commandes :
• Incrémentunitaire(SingleStep)
• CoursederéférenceourechercheretquitterLSouquitterlaplageOverrun(Ls-
RefMove)
• Positionnementavecvitesseconstante(MoveVconst)
• Positionnementavecproldevitesse(StartMP)
• Annulerl'instructiondecourse(Stop)
• Validationdesinstructionsdecourseaprès«Stop»(Cont)
• Sauvegarderleproldecourse(SaveMP)
• Chargerleproldecourse(ActMP)
• Redémarrerlemicroprogrammedumodule(ResMC)
• Supprimerleregistred'erreur(ClrError)
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG

Fonctions programmables dans PG5
Accèspardesblocsdefonctions(FB)
4-5
4
Instructions de paramétrage :
• Entrerl'accélérationmoyenneaudémarrage(LdAcc)
• Entrerladécélérationdefreinagemoyenne(LdDec)
• Entrerlavitessemaximale(LdVmax)
• Entrerlavitesseminimale(LdVmin)
• Entrerlavaleurdejerkpourlaplaged'accélération(LdJPa)
• Entrerlavaleurdejerkpourlaplagedefreinage(LdJPd)
• Entrerlapositiondeconsignerelative(LdDestRel)
• Entrerlapositiondeconsigneabsolue(LdDestAbs)
• Dénirlapositionabsoluedel'emplacementactueldel'axe(LdActPosAbs)
• Entrerlalogiqueducontacteurdendecourse(LdIoConf)
Instructions de lecture :
• Lirel'accélérationmoyenneaudémarrage(RdAcc)
• Lireladécélérationdefreinagemoyenne(RdDec)
• Lirelavitessemaximale(RdVmax)
• Lirelavitesseminimale(RdVmin)
• Lirelavaleurdejerkpourlaplaged'accélération(RdJPa)
• Lirelavaleurdejerkpourlaplagedefreinage(RdJPd)
• Lirelapositiondeconsignerelative(RdDestRel)
• Lirelapositiondeconsigneabsolue(RdDestAbs)
• Lirelapositionréelleactuellerelative(RdActPos)
• Lireletempsdepositionnementactuel(RdActRuntime)
• Lirelavitesseactuelle(RdActSpeed)
• Lirelapositionabsolueactuelle(RdActPosAbs)
• Lirel'erreur(RdError)
• Lirel'état(RdStatus)
• Lirelacongurationd'E/S(RdIoConf)
• Lirelaversiondumicroprogramme(RdFwVersion)
Module de moteur pas à pas PCD2/3.H222 - Manuel du matériel | Doc. 26-878, vers. FRA05 | 2017-05-30
Saia-Burgess Controls AG
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
La page est en cours de chargement...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40








































SBC PCD2.H222 & PCD3.H222 stepper motor module Le manuel du propriétaire
- Taper
- Le manuel du propriétaire
Documents connexes
-
SBC PCD2.H222 and PCD3.H222 - Module for stepper motors Fiche technique
-
-
-
-
-
-
-
-
-